Введение
Из числа различных видов современных электрических машин самой распространённой в наши дни является асинхронная бесколлекторная машина, применяемая обычно в качестве двигателя.
Асинхронная машина – это машина, в которой при работе возбуждается вращающееся магнитное поле, но ротор вращается асинхронно, т.е. с угловой скоростью, отличной от угловой скорости поля. Она была изобретена М. О. Доливо – Добровольским в 1888 г., но до настоящего времени сохранила ту простую форму, которую ей придал русский изобретатель.
Причины исключительно широкого распространения асинхронного двигателя – его простота и дешевизна. Можно сказать, что в основном асинхронная машина состоит из трёх неподвижных катушек (точнее, обмоток), размещённых на общем сердечнике, и помещенной между ними четвёртой, вращающейся катушки. В машине отсутствуют какие-либо легко повреждающиеся или быстро изнашивающиеся части (например, коллектор).
Асинхронные машины малой мощности часто выполняются однофазными для устройств, питающихся от двухпроводной сети. Такие машины находят широкое применение в бытовой технике.
Общий недостаток асинхронных машин – это относительная сложность и неэкономичность регулирования их режимов работы.
Представление механической части электропривода 2-массовой системой даёт наиболее полное представление о динамических процессах, происходящих в реальном приводе, т. к. даже сложные механические системы, связанные с приводом, сводятся к 2-массовой или 3-массовой системам.
Исходные данные
Моделируемая машина – асинхронный электродвигатель с короткозамкнутым ротором типа 4А160S4У3
Справочные данные:
Мощность АД, Pn (кВт)18.5
Число пар полюсов 2
К.П.Д. η (%)89.5
сosφ0.88
Номинальное скольжение Sn(%)2.2
Номинальная частота f1(Гц) 50, Unф (В)220
Момент инерции ротора Jд.р. .0,13
Параметры Т-образной схемы замещения двигателя (в относительных единицах):
Активное сопротивление обмотки статора Rs= 0.042
Индуктивное сопротивление рассеяния обмотки статора Xs = 0.085
Приведённое активное сопротивление обмотки ротора R r' = 0.024
Приведённое индуктивное сопротивление рассеяния обмотки ротора Xr’ = 0.13
Индуктивное сопротивление магнитной цепи Xµ = 4.3
Обработка исходных данных для моделирования
Угловая скорость вращения магнитного поля:
ω0 = 2×π×f1/p = 2×π×50/2 = 157 рад/с
Номинальная угловая скорость ротора определяется на основе выражения скольжения:
Sн = (ω0- ωн)/ ω0 , откуда
ωн = ω0× (1- Sн) = 157× (1-0.022) =153.546 рад/с
Номинальный момент двигателя:
Мн = Рн / ωн = 18500/153.546 = 120,485 Н×м
Номинальный ток двигателя определяется из выражения потребляемой мощности:
Р1=3×Uнф×Iнф×cosj.
Потребляемая мощность, в свою очередь равна:
Р1=Рн/h = 3000/0.895 = 20670,39 Вт, тогда
Iнф = Р1/(3×Uнф×cosj.) = 20670,39 /(3×220×0.88) = 35,589 A
Номинальное сопротивление двигателя, на которое необходимо умножить активные и индуктивные сопротивления в относительных единицах, чтобы получить параметры двигателя в абсолютных единицах (Ом):
Zн = Uнф/ Iнф = 220/35,589 = 6,18 Ом
Пересчитаем параметры Т – образной схемы замещения двигателя из относительных единиц в абсолютные.
Активное сопротивление обмотки статора:
Rs= 0.042×6,18 = 0,2596 Ом
Приведённое активное сопротивление обмотки ротора:
R r' = 0.024×6,18 = 0,148358 Ом
Собственная индуктивность статора:
Lσs = Xs/2×π×f1 = 0.085×6,18 /2×π×50 = 0.00167 Гн
Собственная индуктивность ротора:
Lσr = Xr’/2×π×f1 = 0.13×6,18/2×π×50 = 0.0025573 Гн
Взаимная индуктивность:
Lm = Xµ/2×π×f1 = 4.3×6,18/2×π×50 = 0.084587 Гн
Индуктивность обмотки статора:
L1 = Lm + Lσs = 0.084587 + 0.00167 = 0.086257 Гн
Индуктивность обмотки ротора:
L2 = Lm + Lσr = 0.084587 + 0.0025573 = 0.0871443 Гн
Разработка модели
Математическая модель асинхронного двигателя в форме Коши (в системе координат u-v) имеет следующий вид:

Пуск двигателя будем выполнять на холостом ходу, и после выхода АД на синхронную скорость нагрузим номинальным моментом.
Момент инерции привода подобран таким образом, чтобы в динамической кривой скорости вращения двигателя ω (t) не было колебаний при выходе на установившийся режим.
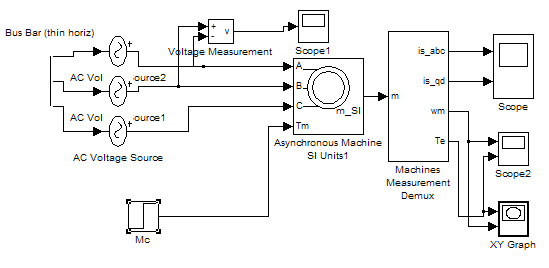
Блок-схема прямого пуска асинхронного двигателя с использованием пакета Power System Blockset