Передаточная функция ПИ-РС определяется на основании известной для СО желаемой передаточной функции разомкнутого контура:
 , где kpc – коэффициент передачи П-РС, Трс = 8Тμ/ kpc – постоянная времени интегрирования РС.
, где kpc – коэффициент передачи П-РС, Трс = 8Тμ/ kpc – постоянная времени интегрирования РС.
Таким образом, регулятор скорости имеет ПИ-структуру. Поскольку в передаточной функции PC в числителе появилось форсирующее звено 8Тμ р + 1, то в этом случае при прохождении управляющего сигнала задания скорости U3C через PC возрастает перерегулирование при отработке заданного значения якорного тока. Для снижения величины перерегулирования якорного тока на входе PC со стороны задания включают дополнительный фильтр ДФ с передаточной функцией, обратной по отношению к передаточной функции форсирующею звена
Рассмотрим динамические свойства двукратно интегрирующей системы регулирования скорости электродвигателя по задающему и возмущающему воздействиям.
Сравнительная реакция однократно интегрирующей и двукратно интегрирующей систем регулирования скорости электродвигателя на скачкообразное задание U3Cmax =10 В показана на рис.2.42.
Переходные процессы, соответствующие настройке системы регулирования на МО, представлены под номерами 1 и 2, а настройке на СО – под номерами 3 и 4. Кривые 1 и 3 представляют изменение во времени напряжений обратных связей но току U0T = f(t), а кривые 3 и 4 – изменение во времени напряжений обратных связей по скорости. Переходный процесс скорости (кривая 4) соответствует оптимальному переходному процессу четвертого порядка с перерегулированием σ = 6,2% и временем нарастания tн = 14,4Тμ. Как видно из рис. двукратная система регулирования на управление реагирует медленнее, чем однократная, и имеет примерно то же перерегулирование по скорости.
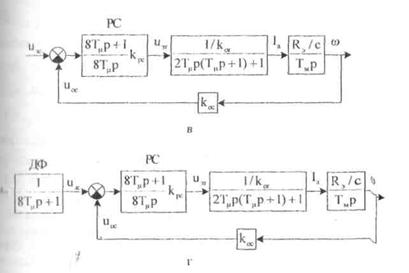
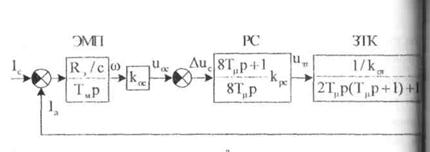
 Определим передаточные функции замкнутой двукратно интегрирующей системы регулирования скорости по возмущающему воздействию. Исходные структурные схемы СУЭП представлены на рис 2. Структурной схеме на рис.2а соответствует передаточная функция, определяемая следующим выражением:
Определим передаточные функции замкнутой двукратно интегрирующей системы регулирования скорости по возмущающему воздействию. Исходные структурные схемы СУЭП представлены на рис 2. Структурной схеме на рис.2а соответствует передаточная функция, определяемая следующим выражением:
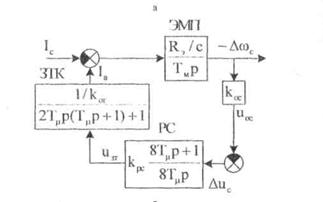
Передаточная функция для структурной схемы рис 2б примет вид:
|
|
Как видно из полученных выражений, знаменатель передаточных функций соответствует оптимальному полиному четвертого порядка. После соответствующих математических преобразований можно получить следующие выражения для переходных процессов в двукратно интегрирующей СУЭП при скачкообразном приложении возмущающего воздействия:
где τ = t / 8Tμ – относительное время.
Из последних выражений видно, что после затухания переходных процессов установившееся значение статической просадки скорости равно нулю Δωсуст = 0, а установившееся значение якорного тока будет равно возмущающему воздействию, т.е. Iауст = Iс.
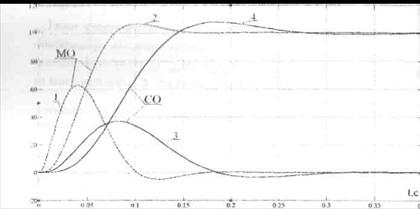
Сравним переходные процессы в одно- и двукратно интегрирующей системах регулирования при скачкообразном приложении статического тока, равного номинальному току электродвигателя. На рис 3. переходные процессы под номерами 1 и 2 соответствуют настройке системы регулирования на МО, а под номерами 3 и 4 – настройке на СО (1 и 3 – зависимости изменения во времени напряжений обратной связи по току якоря uот = f(t); 2 и 4 – напряжений обратной связи по скорости.
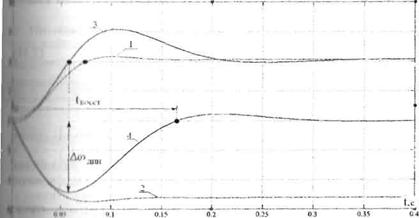
Рис.3. Реакция СУЭП на возмущающее воздействие
Из рис 3 можно сказать, что принципиальное отличие реакции СУЭП, настроенной на СО, состоит в том, что после вызванного увеличением нагрузки на валу двигателя временного (динамического) падения скорости, происходит восстановление скорости до заданной величины.
 Важнейшими показателями качества регулирования являются максимальное динамическое падение скорости и время ее восстановления
Важнейшими показателями качества регулирования являются максимальное динамическое падение скорости и время ее восстановления
Восстановление скорости происходит в результате действия интегральной составляющей РС за счет повышенного перерегулирования тока (момента), составляющего примерно 54%.
Возможно применение ПИ-РС, обеспечивающего минимальный показатель колебательности системы регулирования с передаточной функцией