При синтезе алгоритма оценки воспользуемся методом максимального правдоподобия (МП) [1-5]. Согласно этому методу необходимо формировать логарифм функционала отношения правдоподобия (ЛФОП)  как функцию неизвестной амплитуды. На основании результатов работ [1-3] выражение для ЛФОП можно представить в виде
как функцию неизвестной амплитуды. На основании результатов работ [1-3] выражение для ЛФОП можно представить в виде
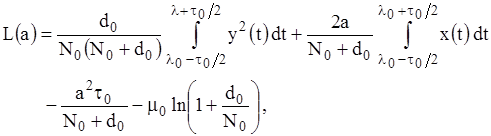 (1.4)
(1.4)
где  - отклик фильтра с импульсной характеристикой
- отклик фильтра с импульсной характеристикой  на реализацию наблюдаемых данных
на реализацию наблюдаемых данных  (1.1), причем передаточная функция
(1.1), причем передаточная функция  этого фильтра удовлетворяет условию
этого фильтра удовлетворяет условию  ,
,  ,
,  .
.
Оценка максимального правдоподобия (ОМП) неизвестной амплитуды  определяется как положение наибольшего максимума ЛФОП по переменной а:
определяется как положение наибольшего максимума ЛФОП по переменной а:
 . (1.5)
. (1.5)
Положение наибольшего максимума ЛФОП  является решением системы уравнения и неравенства:
является решением системы уравнения и неравенства:
 ,
,  . (1.6)
. (1.6)
Согласно (1.3)
 . (1.7)
. (1.7)
Тогда ОМП  параметра
параметра  запишется в виде
запишется в виде
 .
.  (1.8)
(1.8)
Алгоритм (1.8) можно реализовать с помощью измерителя, структурная схема которого показана на рисунке.
Рисунок 1 - Максимально-правдоподобный измеритель математического ожидания случайного импульсного сигнала
Здесь обозначено: 1 - ключ открывающийся на время 
 , 2 - интегратор, 3 - делитель.
, 2 - интегратор, 3 - делитель.
Рассмотрим характеристики оценки (1.8). Поскольку аддитивная помеха  является гауссовской, то ОМП (1.8) является гауссовской случайной величиной. Поэтому ее эффективность полностью (в статистическом смысле) характеризуется условными смещением
является гауссовской, то ОМП (1.8) является гауссовской случайной величиной. Поэтому ее эффективность полностью (в статистическом смысле) характеризуется условными смещением  , дисперсией
, дисперсией  и связанным с ними рассеянием
и связанным с ними рассеянием  .
.
Согласно определению условное смещение ОМП (1.8) найдем путем ее непосредственного усреднения по реализациям  :
:
 . (1.9)
. (1.9)
Подставляя формулы (1.1), (1.2) в (1.9) и учитывая, что  , получаем:
, получаем:
 . (1.10)
. (1.10)
Таким образом, ОМП (1.8) при априори известных остальных параметрах импульса является условно (а, следовательно, и безусловно) несмещенной.
Аналогично можно найти условную дисперсию ОМП (1.9):
 (1.11)
(1.11)
Подставляя (1.1), (1.2) в (1.11), получаем:
 (1.12)
(1.12)
Поскольку сигнал и шум статически независимы, то  . Кроме того,
. Кроме того, 
 ,
,  , где
, где  - корреляционная функция процесса
- корреляционная функция процесса  , а
, а  - дельта-функция. С учетом трех последних равенств из (1.12) получаем
- дельта-функция. С учетом трех последних равенств из (1.12) получаем
 .(1.13)
.(1.13)
Для вычисления первого интеграла в (1.13) сделаем замену переменных:  ,
,  . Тогда, полагая, что флуктуации процесса
. Тогда, полагая, что флуктуации процесса  являются «быстрыми», т.е. выполняется условие
являются «быстрыми», т.е. выполняется условие  , имеем:
, имеем:
 (1.14)
(1.14)
Для вычисления второго интеграла в (1.13) используем фильтрующее свойство δ-функции:  . Тогда находим:
. Тогда находим:
 (1.15)
(1.15)
Подставляя (1.14), (1.15) в (1.13) для дисперсии оценки  окончательно получаем
окончательно получаем
 (1.16)
(1.16)
Поскольку ОМП (1.8) является несмещенной, то дисперсия оценки совпадает с ее рассеянием:
 . (1.17)
. (1.17)
Из формул (1.10), (1.16), (1.17) следует, что точность ОМП (1.8) МО случайного импульсного сигнала (1.2) не зависит от искаженного значения параметра  . Дисперсия оценки МО, с одной стороны, возрастает с увеличением спектральной плотности
. Дисперсия оценки МО, с одной стороны, возрастает с увеличением спектральной плотности  и N0 процесса и шума
и N0 процесса и шума  , а, с другой стороны, уменьшается с увеличением длительности измеряемого импульса. Выражения (1.10), (1.16), (1.17) позволяют сделать обоснованный выбор длительности полезного сигнала в зависимости от требуемой эффективности МП измерителя и уровня аддитивных помех.
, а, с другой стороны, уменьшается с увеличением длительности измеряемого импульса. Выражения (1.10), (1.16), (1.17) позволяют сделать обоснованный выбор длительности полезного сигнала в зависимости от требуемой эффективности МП измерителя и уровня аддитивных помех.