БИЛЕТ № 5
Уравнение движения двухмассовой электромеханической системы с упругими связями.
 В обобщенной двухмассовой упругой системе (рис.3.1.1)суммарный
В обобщенной двухмассовой упругой системе (рис.3.1.1)суммарный
приведенный момент инерции элементов, жестко связанных с двигателем,
обозначен  . Суммарный приведенный момент инерции элементов, жестко
. Суммарный приведенный момент инерции элементов, жестко
связанных с рабочим органом механизма, обозначен  . Упругая связь
. Упругая связь
между этими массами характеризуется приведенной эквивалентной
жесткостью  . Суммарные моменты нагрузок на валу двигателя и механизма
. Суммарные моменты нагрузок на валу двигателя и механизма
обозначены соответственно  и
и  .
.
Дифференциальными уравнениями движения такой системы являются уравнения движения в обобщенных координатах (уравнения Лагранжа):
 , (1.1)
, (1.1)
где  - функция Лагранжа;
- функция Лагранжа;  - обобщенная сила, определяемая суммой элементарных работ
- обобщенная сила, определяемая суммой элементарных работ  всех внешних сил на возможном перемещении
всех внешних сил на возможном перемещении  .
.
Число уравнений Лагранжа определяется числом степеней свободы системы.
В двухмассовой упругой системе обобщенными координатами являются угловые перемещения масс  , им соответствуют обобщенные скорости
, им соответствуют обобщенные скорости  .
.
Функция Лагранжа  . (1.2)
. (1.2)
Элементарные работы:  . (1.3)
. (1.3)
Тогда обобщенные силы:  ;
;  . (1.4)
. (1.4)
Подставив (1.2) в (1.1) и учитывая (1.4), получается система уравнений движения:
 (1.5)
(1.5)
В (1.5) пропорциональный деформации упругой связи момент является моментом упругого взаимодействия между движущимися массами системы:
 . (1.6)
. (1.6)
С учетом (1.6) система уравнений движения:
 (1.7)
(1.7)
Система ТП-Д в зоне прерывистого режима как объект регулирования. Двойной регулятор тока.
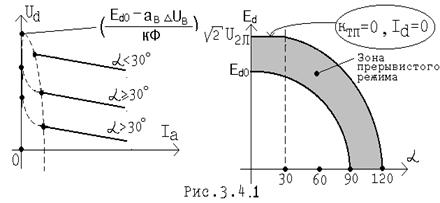
В системе ТП-Д при токе якоря
имеет место прерывистый режим. Когда существенно изменяются параметры объекта регулирования. В зоне прерывистого режима механические х-ки становятся нелинейными, изменяется регулировочная х-ка.
При  :
:  ;
;
 :
:  .
.
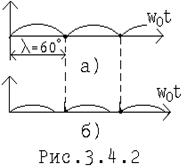
На рис.3.4.2 показаны- а)граничный режим( ); б)прерывистый режим(
); б)прерывистый режим( ). Процессы для тока заканчиваются на одном интервале проводимости, что эквивалентно исчезновению электромагнитной инерционности якоря (
). Процессы для тока заканчиваются на одном интервале проводимости, что эквивалентно исчезновению электромагнитной инерционности якоря ( ).
).
В зоне прерывистого тока  изменяется от в граничном режиме до бесконечности в режиме идеального холостого хода (
изменяется от в граничном режиме до бесконечности в режиме идеального холостого хода ( ).
).
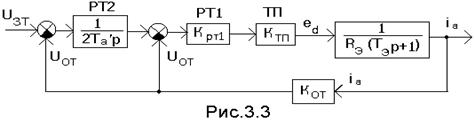
На рис.3.4.3 показана структурная схема системы ТП-Д как объекта регулирования в прерывистом режиме.
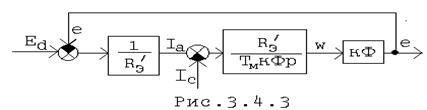
В непрерывном режиме передаточная функция имеет вид:
 .
.
В зоне прерывистого режима передаточная функция имеет вид:
 .
.  .
.  .
.
 меняется от
меняется от  в граничном режиме до бесконечности в режиме идеального холостого хода.
в граничном режиме до бесконечности в режиме идеального холостого хода.
Т.о., структурная схема и параметры объекта существенно изменяются, объект становится нелинейным. Из-за этого САР в зоне прерывистого режима размыкается, динамические свойства резко ухудшаются и когда требуется повышенное качество работы САР, необходимо в зоне прерывистого режима принимать определенные меры.
В устройствах типа ЭКТ для повышения качества динамических режимов в зоне прерывистого тока используется двойной регулятор тока. Такой регулятор применим, когда ТП выполнен качественно, т.е.  . В этом случае при построении 1-го контура тока ТП считается звеном безинерционным.
. В этом случае при построении 1-го контура тока ТП считается звеном безинерционным.
 ,
,
где  .
.
Откуда  - коэффициент усиления РТ1.
- коэффициент усиления РТ1.
 выбирается из условий обеспечения максимального быстродействия 1-го контура тока.
выбирается из условий обеспечения максимального быстродействия 1-го контура тока.
Для р=6:  .
.
Р=12:  .
.
Если меньше, то контур неустойчивый.
 ,
,
где  .
.
1-й контур регулирования тока представляет собой эквивалентный фильтр прямого канала с коэффициентом  .
.
2-й контур регулирования тока строится по принципам подчиненного регулирования и рассматривается как 1-й контур регулирования.
 .
.
 .
.
В непрерывном режиме  .
.
В прерывистом режиме 1-й контур регулирования тока из-за пропорционального РТ1 размыкается. Если внутренняя ОС размыкается, то
 .
.
Коэффициент усиления в прерывистом режиме возрастает в  раз.
раз.