Принципиальная схема включения ДПТ НВ по системе Г-Д
|
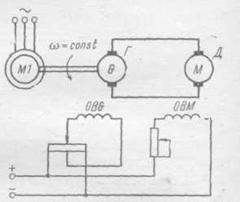
При вращении якоря генератора со скоростью ФГ ≈ const, ЭДС на его зажимах равна ЕГ = kФГωГ и электромеханическая характеристика описывается, как
 - угловая скорость двигателя. - угловая скорость двигателя.
|
|
Регулирование плавное, т.к. осуществляется в цепях возбуждения. Недостатком является низкий КПД, связанный с многократными электромеханическими преобразованиями мощности. Суммарный КПД системы равен  .Еще один недостаток системы Г-Д – большие массогабаритные показатели. В настоящее время эти системы вытесняются приводами с управляемыми вентильными выпрямителями.
.Еще один недостаток системы Г-Д – большие массогабаритные показатели. В настоящее время эти системы вытесняются приводами с управляемыми вентильными выпрямителями.
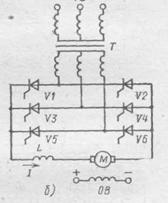
30. Принцип действия и схемы тиристорных преобразователей напряжения. Основным типом преобразователей, примен. в наст. время в регулир. электроприводе ПТ явл. полупроводниковые статич. преобр-ли, в основном тиристорные преоб-ли (ТП). Они представл. собой управляемые реверсивные или нереверсивные выпрямители, собранные по нулевой или мостовой однофазной или трехфазной схеме. Принцип действия ТП основан на том, что в положительный полупериод питающего напряжения тиристор, подобно ключу, открывается и подает напряжение к двигателю только часть этого полупериода (рисунок 8.3). При этом среднее выпрямленное напряжение на нагрузке UСР определяется углом задержки отпирания вентиля α, называемым углом управления.
На рис. 8.4 приведен пример трехфазной нулевой реверсивной схемы ТП, на рис. б приведена мостовая схема ТП

Для m – фазного управляемого выпрямителя при непрерывном токе
 . При анализе статических свойств ТП его структурную схему удобно представить в виде двух последовательно включенных звеньев (рисунок 9): системы импульсно-фазового управления (СИФУ) и собственно тиристорного преобразователя (силового блока). Входным сигналом СИФУ является напряжение управления Uу, которое преобразуется в угол регулирования тиристоров α и определяет среднее значение выпрямленного напряжения Udна выходе силового блока.
. При анализе статических свойств ТП его структурную схему удобно представить в виде двух последовательно включенных звеньев (рисунок 9): системы импульсно-фазового управления (СИФУ) и собственно тиристорного преобразователя (силового блока). Входным сигналом СИФУ является напряжение управления Uу, которое преобразуется в угол регулирования тиристоров α и определяет среднее значение выпрямленного напряжения Udна выходе силового блока.
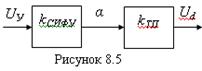 Коэффициент передачи СИФУ представляет собой отношение приращения угла регулирования к приращению напряжения управления.
Коэффициент передачи СИФУ представляет собой отношение приращения угла регулирования к приращению напряжения управления.  .Коэффициент передачи собственно ТП есть отношение приращения среднего значения выпрямленного напряжения к приращению угла регулирования тиристоров
.Коэффициент передачи собственно ТП есть отношение приращения среднего значения выпрямленного напряжения к приращению угла регулирования тиристоров  . Общий коэффициент усиления зависимого инвертора представляет собой отношение приращения среднего значения выпрямленного напряжения к приращению напряжения управления
. Общий коэффициент усиления зависимого инвертора представляет собой отношение приращения среднего значения выпрямленного напряжения к приращению напряжения управления  и в соответствии со структурной схемой
и в соответствии со структурной схемой  .
.
31.Электропривод ПТ по схеме «ТП-Д». Схема регулирования электропривода осущ. по схеме
|
 ,
,
 где RП – эквивалентное сопротивление тиристорного преобразователя.
где RП – эквивалентное сопротивление тиристорного преобразователя.
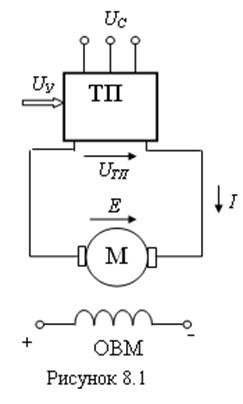
В результате влияния сопротивления преобразователя, характеристики ЭД в разомкнутой схеме управления становятся менее жесткими, чем естественная характеристика (рисунок 8.2). Однако в современных ТП применяются различного рода обратные связи, стабилизирующие скорость при изменении нагрузки.
|
 , где Ud0 максимальное выпрямленное напряжение ТП определяется схемой выпрямления и величиной подводимого к схеме напряжения (вторичного фазного напряжения питающего трансформатора): Ud0 = kСХU2Ф.
, где Ud0 максимальное выпрямленное напряжение ТП определяется схемой выпрямления и величиной подводимого к схеме напряжения (вторичного фазного напряжения питающего трансформатора): Ud0 = kСХU2Ф.

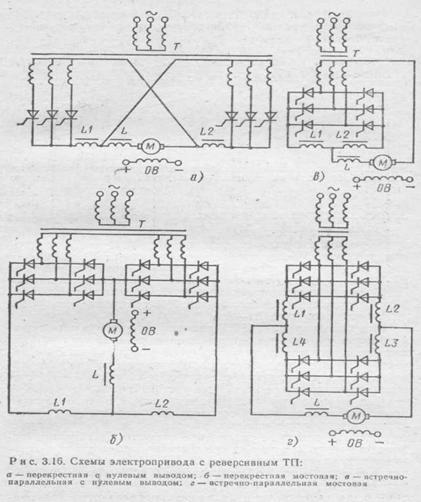
32. Реверсивные схемы тиристорных преобразователей напряжения. Основным типом преобразователей, примен. в наст. время в регулир. электроприводе ПТ явл. полупроводниковые статич. преобр-ли, в основном тиристорные преоб-ли (ТП). Они представл. собой управляемые реверсивные или нереверсивные выпрямители, собранные по нулевой или мостовой однофазной или трехфазной схеме. Принцип действия ТП основан на том, что в положительный полупериод питающего напряжения тиристор, подобно ключу, открывается и подает напряжение к двигателю только часть этого полупериода При этом среднее выпрямленное напряжение на нагрузке UСР определяется углом задержки отпирания вентиля α, называемым углом управления. Нереверсивные схемы ТП используют в те х случаях когда ЭП должен работать в двигат. режиме и режиме торможения противовключением. Если возникает необходимость получения хар-к, располагаемых во всех 4-х квадрантах и реверс двигателя, примен. реверсивные выпрямители. (они состоят из 2- х коплектов нереверсивных выпрямителей)
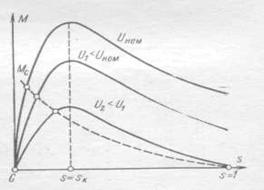
33. Регулирование АД переключением числа пар полюсов. Частоту вращения ротора электродвигателя переменного тока можно определить, как  , (9.1) где f - частотa питающего напряжения; pп - число пар полюсов; s - скольжение. Изменяя один или несколько параметров, входящих в (9.1), можно регулировать частоту вращения и момент АД. Следоват-но, угл. скорость можно рег-ть, изменяя число пар полюсов при заданной частоте питающ. сети и мало измен. скольжении. Регулир-ие ступенчатое вследствие целого числа пар полюсов. Данный способ рег-ия практич-ки реализуется в двигателях с короткозамкнут. ротором, где переключ. производиться в обмотке статора, обмотка ротора при этом автоматич. приспосабл. Если использ. Д с фазным ротором, то преключ. числа пар полюсов в стаоре потребует одновремен. переключ. полюсов и на роторе, что значит. усложн. конструкцию.поэтому чаще использ. Д с короткозамкн. ротором, в кот. переключ. полюсов осущ. изменением направления тока в отдельных половинах каждой фазной обмотки. Существует большое разнообразие схем переключения числа пар полюсов. При необходимости изменить напряжение на обмотке используют соединение обмоток треугольником, двойным треугольником, звезда – треугольник и т.д. Широкое распространение этот вид регулирования получил в станкостроении, грузоподъемной технике (лифты), для вентиляторов, насосов и других отраслях., т.е. там где не требуется плавное рег-ие. Трудоемкость изготовления многоскоростного электродвигателя возрастает по сравнению с обычной машиной за счет выполнения обмотки секционированной. Данный способ явл. весьма экономичным и отлич. мех. хар-ками обладающ. большой жесткостью.
, (9.1) где f - частотa питающего напряжения; pп - число пар полюсов; s - скольжение. Изменяя один или несколько параметров, входящих в (9.1), можно регулировать частоту вращения и момент АД. Следоват-но, угл. скорость можно рег-ть, изменяя число пар полюсов при заданной частоте питающ. сети и мало измен. скольжении. Регулир-ие ступенчатое вследствие целого числа пар полюсов. Данный способ рег-ия практич-ки реализуется в двигателях с короткозамкнут. ротором, где переключ. производиться в обмотке статора, обмотка ротора при этом автоматич. приспосабл. Если использ. Д с фазным ротором, то преключ. числа пар полюсов в стаоре потребует одновремен. переключ. полюсов и на роторе, что значит. усложн. конструкцию.поэтому чаще использ. Д с короткозамкн. ротором, в кот. переключ. полюсов осущ. изменением направления тока в отдельных половинах каждой фазной обмотки. Существует большое разнообразие схем переключения числа пар полюсов. При необходимости изменить напряжение на обмотке используют соединение обмоток треугольником, двойным треугольником, звезда – треугольник и т.д. Широкое распространение этот вид регулирования получил в станкостроении, грузоподъемной технике (лифты), для вентиляторов, насосов и других отраслях., т.е. там где не требуется плавное рег-ие. Трудоемкость изготовления многоскоростного электродвигателя возрастает по сравнению с обычной машиной за счет выполнения обмотки секционированной. Данный способ явл. весьма экономичным и отлич. мех. хар-ками обладающ. большой жесткостью.
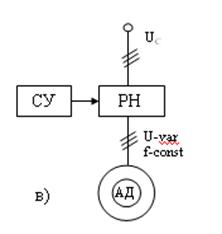
34.Регулирование частоты вращения асинхр. электродвигателей изменением напряжения на его статоре. Если регулир. напряж-ие, подводимое к 3-м фазам АД, то можно изменять макс. момент не изменяя критич. скольжения.Регулирование частоты вращения электродвигателей изменением напряжения на его статоре осуществляется обычно системой «тиристорный регулятор напряжения – асинхронный двигатель».
|
Пределы регулирования можно увеличить, используя АД с повышенным скольжением или включение добавочного сопротивления в цепь фазного ротора, а также применяя системы управления, замкнутые по скорости.
|
а коэффициент мощности системы уменьшается с увеличением скольжения двигателя.
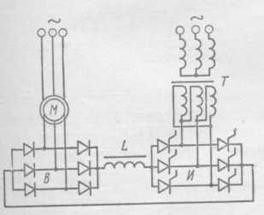
35. Регулирование частоты вращения асинхронных электродвигателей в схеме асинхронно-вентильного каскада. (АВК) Каскадные электроприводы с АД с фазным ротором целесообразно примен. в установках средней и большой мощности, работающих в продолжит. режиме при относит-но небольших диапазонах регулирования.(воздуходувки центробежные насосы, шаровые мельницы и т.д.) Они позволяют полезно использовать энергию скольжения, легко поддаются автоматизации. По типу устройства, преобраз. энергию скольжения, различ. электромашинные, вентильно-машинные и вентильные каскады. На рис. приведена принципиальная схема АВК, в кот. электромех. агрегат пост. скорости заменен инвертором.
|
Опережения включения тиристорного инвертора. Ток в роторной цепи  , где
, где  - 1,35
- 1,35  ,
,  =2,34
=2,34  - ЭДС х.х. инвертора при В=0,
- ЭДС х.х. инвертора при В=0,  -эдс фазы тр-ра,
-эдс фазы тр-ра,  -суммарное падение напряжения в вентилях роторной и инверторной групп, Rэ- эквив. сопр-ие, привденное к роторной цепи. Ур-ие момента АД Ммакс=
-суммарное падение напряжения в вентилях роторной и инверторной групп, Rэ- эквив. сопр-ие, привденное к роторной цепи. Ур-ие момента АД Ммакс=  . Ток ротора равен
. Ток ротора равен  отсюда при Id=0 пренебрегая U получим
отсюда при Id=0 пренебрегая U получим  , далее после преобразований получим приближенное выражение для момента
, далее после преобразований получим приближенное выражение для момента  Примерные мех.хар-ки
Примерные мех.хар-ки
|
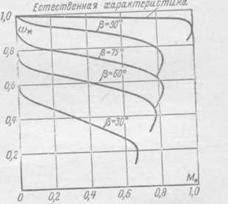
АВК, из кот. видно, что при
.
36. Частотно-регулируемый электропривод. Законы частотного рег-ия. Частоту вращения ротора электродвигателя переменного тока можно определить, как  , где меняя один из параметров можно регулировать угл. скорость АД. При рег-ии частоты также возникает необходимость рег-ия амплитуды напряжения источника, что следует из выражения U1=E1=kФf1. Если при неизменном напряжении изменять частоту, то поток будет измен. обратно пропоц. частоте, т.е. при уменьш. частоты поток возрастет и приведет к насыщению стали машины и к резкому увелич. тока и превышению темпиратуры, при увелич. частоты поток будет уменьшаться и как следствие будет уменьшаться и допустимый момент. Тогда следует вывод, что при изменении частоты питания необходимо одновременно изменять и действующее значение напряжения, кот. изменяется по отношению к частоте в соответсвии с каким-либо законом частотного рег-ия. Законы частотного регулирования Для идеализированного электродвигателя, у которого можно пренебречь активным сопротивлением статора, основной закон изменения напряжения при частотном регулировании выражается формулой:
, где меняя один из параметров можно регулировать угл. скорость АД. При рег-ии частоты также возникает необходимость рег-ия амплитуды напряжения источника, что следует из выражения U1=E1=kФf1. Если при неизменном напряжении изменять частоту, то поток будет измен. обратно пропоц. частоте, т.е. при уменьш. частоты поток возрастет и приведет к насыщению стали машины и к резкому увелич. тока и превышению темпиратуры, при увелич. частоты поток будет уменьшаться и как следствие будет уменьшаться и допустимый момент. Тогда следует вывод, что при изменении частоты питания необходимо одновременно изменять и действующее значение напряжения, кот. изменяется по отношению к частоте в соответсвии с каким-либо законом частотного рег-ия. Законы частотного регулирования Для идеализированного электродвигателя, у которого можно пренебречь активным сопротивлением статора, основной закон изменения напряжения при частотном регулировании выражается формулой:  (9.2) где: МС1 и МС2 – моменты статической нагрузки, соответствующее работе двигателя при частотах f1 и f2; U11 U12- напряжение на двигателе при тех же частотах.При постоянстве момента статической нагрузки напряжение источника питания должно изменяться пропорционально его частоте.В этом случае для идеализированного двигателя сохраняется перегрузочная способность (Мк=const) и закон изменения напряжения примет видU1/ f1 = const,(9.3)При постоянстве мощности на валу двигателя в процессе регулирования скорости закон изменения напряжения:
(9.2) где: МС1 и МС2 – моменты статической нагрузки, соответствующее работе двигателя при частотах f1 и f2; U11 U12- напряжение на двигателе при тех же частотах.При постоянстве момента статической нагрузки напряжение источника питания должно изменяться пропорционально его частоте.В этом случае для идеализированного двигателя сохраняется перегрузочная способность (Мк=const) и закон изменения напряжения примет видU1/ f1 = const,(9.3)При постоянстве мощности на валу двигателя в процессе регулирования скорости закон изменения напряжения:  , (9.4При вентиляторной нагрузке напряжение на статоре должено изменяться по закону:
, (9.4При вентиляторной нагрузке напряжение на статоре должено изменяться по закону:  (9.5)
(9.5) 
37 Преобразователи частоты для управления АД. Непосредственный ПЧ. в наст. время для осущ. частотного рег-ия угл. скорости широкое применение находят ПЧ, на выходе кот. по требуемуму соотношению меняется как частота, так и амплитуда напряжения. ПЧ делят на электромашинные и вентильные. В свою очередь по принципу формирования выходного напряжения или тока ПЧ можно подразделить на непосредственные преобразователи частоты (НПЧ, или циклоконверторы) и ПЧ со звеном постоянного тока. В НПЧ используется коллекторная машина переменного тока, на вход кот. подают переменное напр-ие с пост. частотой и амплитудой, а на выходе ее получают напр-ие с регулир. частотой и амплитудой. В устройствах данного типа функции выпрямления напряжения сети и его преобразование в напряжение или ток требуемой частоты выполняются в одном устройстве. Это обусловливает однократное преобразование энергии и высокое значение КПД, малые габариты и массу НПЧ. Они выполняются по тем же схемам, что и выпрямители (однофазные, многофазные, нулевые, мостовые). На рисунке 10.1 приведена простейшая схема НПЧ, осуществляющего преобразование трехфазного напряжения промышленной частоты f1 в однофазное напряжение регулируемой частоты f2. 
|
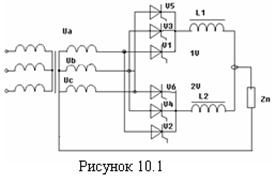
напряжения Т2/2, причем положительная полуволна формируется при работе группы 1V, отрицательная – группы 2V. Выходное напряжение преобразователя представляет собой огибающую фазных напряжений. Форма этого напряжения зависит от числа фаз сети, частоты выходного напряжения, которую можно регулировать путем изменения длительности проводимости групп 1V и 2V, и т.д.
Дальнейшее повышение частоты связано с отказом от естественной коммутации вентилей, увеличением фаз питания или подачей на преобразователь напряжения повышенной частоты. Потому область применения НПЧ в регулируемом электроприводе ограничена тихоходными безредукторными электроприводами и схемами управления по цепи ротора (машины двойного питания).
38. Преобразователи частоты для управления АД. ПЧ с управляемым выпрямителем. в наст. время для осущ. частотного рег-ия угл. скорости широкое применение находят ПЧ, на выходе кот. по требуемуму соотношению меняется как частота, так и амплитуда напряжения. ПЧ делят на электромашинные и вентильные. В свою очередь по принципу формирования выходного напряжения или тока ПЧ можно подразделить на непосредственные преобразователи частоты (НПЧ, или циклоконверторы) и ПЧ со звеном постоянного тока. ПЧ с ЗПТ в свою очередь делятся на ПЧ с управляемым выпрямителем и ПЧ с широтно-импульсной модуляцией. ПЧ с ЗПТ и с УВ находит широкое применение для пром. приводов. Структурная схема приведена на рис. ПЧ состоит из 2-х силовых элементов- УВ и автономный инвертор АИ.

Промышл. частоты, с выхода УВ пост. регулир. напр-ие подается на АИ, кот. преобразует пост. напр-ие в перемен. регулир. амплитуды и частоты. Выходная частота регулир-тся в широких пределах и опред-тся частотой коммутации тиристоров инвертора. ПЧ позволяет рег-ть частоту как вверх, так и вниз от частоты питающей сети, он отлич. выс. КПД, занчит. быстродействием, малыми габаритами, выс. надежностью и бесшумием в работе. В качестве УВ чаще всего использ 2 тиристора и два диода включ. в полуупавляемую мостовую схему для получения двухполупериодного выпрямленного напряжения. АИН состоит из 6 тиристоров, 6 последовательно включенных с ними диодов и 6 диодов включенных по трехфазной мостовой схеме. Преобразование пост. напр-ия в трехфазное переменное осущ. коммутацией тиристоров, работающих в опред. последовательности. В каждый момент времени вне коммутации открыты одновременно 2 тиристора. Вых. напр-ие при чисто акт нагрузке имеет ступенчатую форму и длительность каждой ступени соответсвует 1/6 периода вых. напр-ия.
39. Преобразователи частоты для управления АД. ПЧ с широтно-импульсной модуляцией ШИМ. в наст. время для осущ. частотного рег-ия угл. скорости широкое применение находят ПЧ, на выходе кот. по требуемуму соотношению меняется как частота, так и амплитуда напряжения. ПЧ делят на электромашинные и вентильные. В свою очередь по принципу формирования выходного напряжения или тока ПЧ можно подразделить на непосредственные преобразователи частоты (НПЧ, или циклоконверторы) и ПЧ со звеном постоянного тока. ПЧ с ЗПТ в свою очередь делятся на ПЧ с управляемым выпрямителем и ПЧ с широтно-импульсной модуляцией.
|
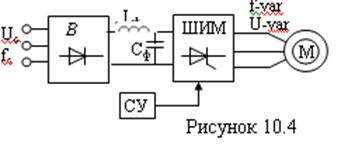
позволяет обеспечить весьма широкий диапазон регулирования угл. скорости АД и уменьшить потери в нем от высших гармоник. При использ. инверторов с шИМ отпадает необходимость в источнике регулируемого выпрямленного напр-ия, что упрощает силовую схему и позволяет получить коэф-нт мощности ПЧ близкий к 1. На рисунке 10.8 представлен однофазный инвертор напряжения с ШИМ.

В качестве примера рассмотрена двухполярная односторонняя ШИМ, когда в качестве опорного напряжения используется пилообразное опорное напряжение Uн с высокой частотой Wн, с которой коммутируются вентили силовых групп. Длительность импульсов несущей частоты изменяется с каждым периодом в соответствии с формой модулирующего напряжения Uм. Это достигается сравнением опорного напряжения Uн с модулирующим, и переключение вентилей происходит в момент их равенства. Тогда выходное напряжение описывается логической функцией  (10.1) Выходное напряжение, усредненное за период несущей частоты, можно записать, как
(10.1) Выходное напряжение, усредненное за период несущей частоты, можно записать, как  (10.2)где UП – выпрямленное напряжение на входе инвертора; t1, t2 – время включенного состояния вентильных групп;ТН =2π/ωнес – период опорного напряжения.При синусоидальной ШИМ, обеспечивающей минимальное содержание высших гармонических в Uвых,
(10.2)где UП – выпрямленное напряжение на входе инвертора; t1, t2 – время включенного состояния вентильных групп;ТН =2π/ωнес – период опорного напряжения.При синусоидальной ШИМ, обеспечивающей минимальное содержание высших гармонических в Uвых,
 (10.3)где μ=UM/UMmax – относительное значение глубины модуляции; UMmax – максимальное напряжение модулирующего напряжения; ωвых – частота выходного напряжения.
(10.3)где μ=UM/UMmax – относительное значение глубины модуляции; UMmax – максимальное напряжение модулирующего напряжения; ωвых – частота выходного напряжения.
|

Совместное решение уравнений (11.1), (11.2) и (11.3) дает выражение (11.4) для электромеханической характеристики привода с отрицательной обратной связью по скорости (Uзс – кдс× ω)×крс×кп = k×Фн× ω + I×RЭ,Uзс×крс×кп + кдс× ω ×крс×кп = k×Фн× ω + I×RЭ, 
где Кд = 1/kФН – коэффициент передачи двигателя. На рисунке 11.2 представлены естественная и искусственные статические характеристики ЭП с ООС по скорости.
|
 и при кдс×крс×кп = 0 соответствуют разомкнутой системе. При кдс×крс×кп → ¥ (т.е. при очень большом коэффициенте усиления) можно получить
и при кдс×крс×кп = 0 соответствуют разомкнутой системе. При кдс×крс×кп → ¥ (т.е. при очень большом коэффициенте усиления) можно получить
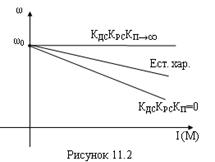
абсолютно жесткие характеристики (∆ω = 0). Такие же характеристики можно получить при интегральном регуляторе скорости.
41. Замкнутые системы автоматизированного электропривода. АЭП с обр. связью по току. На рисунке 11.3 представлена схема ЭП с обратной связью по току. На рисунке РТ – регулятор тока с коэф-том усиления КРТ, ДТ - датчик тока с передаточным коэффициентом кд.
|

Напряжение датчика тока пропорционально току якоря двигателяUдТ = кдТ× I = β×I× RЭ. (11.7)Совместное решение уравнений (11.5), (11.6) и (11.7) дает выражение (11.8) для электромеханической характеристики привода с положительной или отрицательной обратной связью по току  , (11.8) где (+) – для положительной ОС, (-) – для отрицательной ОС. При положительной обратной связи по току снижение скорости
, (11.8) где (+) – для положительной ОС, (-) – для отрицательной ОС. При положительной обратной связи по току снижение скорости  , и при кдТ×крТ×β = 0 соответствует разомкнутой схеме, при кдТ×крТ×β = 0 характеристика будет абсолютно жесткой, а при кдТ×крТ×β →∞ - ∆ω→ -∞ (отрицательная жесткость). Положительная обратная связь по току делает характеристики более жесткими, чем те же характеристики в разомкнутой системе (см. рисунок 11.4).
, и при кдТ×крТ×β = 0 соответствует разомкнутой схеме, при кдТ×крТ×β = 0 характеристика будет абсолютно жесткой, а при кдТ×крТ×β →∞ - ∆ω→ -∞ (отрицательная жесткость). Положительная обратная связь по току делает характеристики более жесткими, чем те же характеристики в разомкнутой системе (см. рисунок 11.4).
|
 и применяется для реализации мягких характеристик ЭП. При кдТ×крТ×β = 1 характеристика будет соответствовать
и применяется для реализации мягких характеристик ЭП. При кдТ×крТ×β = 1 характеристика будет соответствовать
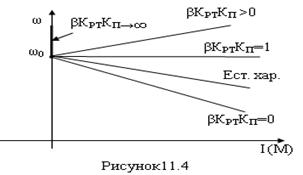
разомкнутой системе, а при кдТ×крТ×β →∞ - ∆ω→∞ (абсолютно мягкая). В одноконтурных системах АЭП отрицательная обратная связь, как правило, применяется задержанная, т.е. вступает в работу при определенной токовой нагрузке. Для задержания ОС применяется стабилитрон.
43. Двухконтурная система электропривода с отриц. ОС по скорости и отсечкой (задержанной ОС) по току. С целью ограничения тока в вентильном преобразователе и якоре двигателя может использоваться задержанная отрицательная обратная связь по току (токовая отсечка). В этом случае электропривод имеет экскаваторную характеристику. На рисунке 11.5 представлена функциональная схема двухконтурной системы электропривода с отрицательной обратной связью по скорости и отсечкой (задержанной обратной связью) по току.
|
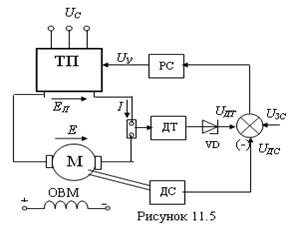
Uy = (Uзс – Uдс)×крс. (Напряжение управления), ЭДС преобразователя: Еп = Uу ×кп = Е + I×RЭ, (11.2)где Е = k×Фн×ω - ЭДС якоря ДПТ; КП – коэффициент усиления преобразователя. Напряжение датчика скорости пропорционально частоте вращения якоря двигателя Uдс = кдс× ω(11.3). и угл. скорость  где Кд = 1/kФН – коэффициент передачи двигателя. б) I > Iотс, ½Uдт½> Uст VD. В этом диапазоне тока одновременно на входе регулятора скорости действуют два сигнала ОС: - сигнал по скорости, который стремится сделать скоростную характеристику более жесткой; - сигнал по току, который стремится сделать скоростную характеристику более мягкой. Для получения требуемой характеристики должна преобладать ОС по току. Сигнал управления становится равен Uy = (Uзс – Uдс – Uдт + Uст)×крс
где Кд = 1/kФН – коэффициент передачи двигателя. б) I > Iотс, ½Uдт½> Uст VD. В этом диапазоне тока одновременно на входе регулятора скорости действуют два сигнала ОС: - сигнал по скорости, который стремится сделать скоростную характеристику более жесткой; - сигнал по току, который стремится сделать скоростную характеристику более мягкой. Для получения требуемой характеристики должна преобладать ОС по току. Сигнал управления становится равен Uy = (Uзс – Uдс – Uдт + Uст)×крс
где UДТ = b×I×RЭ - сигнал датчика тока; UСТ – напряжение пробоя стабилитрона. Решая совместно уравнения (11.2), (11.3) и Uy = (UзТ ± UдТ)×крТ, (11.5)получим выражение (11.10) для второго участка электромеханической характеристики привода при наличии обратных связей по скорости и по току [Uзс – ω×кдс – b×I×(Ra + Rп) + Uст]×крс×кп = се×Фн× ω + I×(Ra + Rп),  . (11.10) Статические характеристики двухконтурной системы АЭП с отрицательной ОС по скорости и отсечкой по току представлены на рисунке 11.6.
. (11.10) Статические характеристики двухконтурной системы АЭП с отрицательной ОС по скорости и отсечкой по току представлены на рисунке 11.6.

|
 Постоянную интегрирования С найдем из начального условия ω(t=0)=ωНАЧ=С. Окончательно:
Постоянную интегрирования С найдем из начального условия ω(t=0)=ωНАЧ=С. Окончательно:
 . (12.1) Искомые зависимости ω(t) и М(t) должны быть получены решением (12.1) при заданных начальных условиях. M=const, MC =const (рисунок 1)
. (12.1) Искомые зависимости ω(t) и М(t) должны быть получены решением (12.1) при заданных начальных условиях. M=const, MC =const (рисунок 1)

 (12.2)
(12.2)
45 Переходные процессы в электроприводе при L=0 и изменениях воздействующих факторов скачком. Mс=const, M ≡ω. Перех. или динамич. режимом наз-тся режим работы при переходе из одного состояния привода к др., происходящему во время пуска, торможения, реверсирования и резкого приложения нагрузки на валу, при кот. происходит изменение момента нагрузки Мс и момента двигателя М. В переходном режиме электропривода одновременно и взаимосвязано м/у собой действуют перех. мех. электромагн. и тепловые процессы. Обычно тепловые процессы не учитывают и имеют место только электромагн. и мех. процессы. Электромагн. ПП вызываются электромагн. инерцией обмоток Эл. машин и аппаратов. В некоторых случаях влиянием электромагн. процессов можно принебречь, т.е. L=0 и ПП будеут опред-тся только мех. процессами, в кот. учитывается только мех. инерция движущихся масс электропривода. Все переходные процессы подчиняются механическому уравнению движения  (12.1). Искомые зависимости ω(t) и М(t) должны быть получены решением (12.1) при заданных начальных условиях. Mс=const, M ≡ω.
(12.1). Искомые зависимости ω(t) и М(t) должны быть получены решением (12.1) при заданных начальных условиях. Mс=const, M ≡ω.

Уравнение линейной механической характеристики двигателя с отрицательной жесткостью (например, ДПТ НВ) может быть записано, как  , (12.4) или
, (12.4) или  , (12.5) где β=dM/dω – жесткость механической характеристики, для линейной характеристики β=∆M/∆ω. Из (12.5) и
, (12.5) где β=dM/dω – жесткость механической характеристики, для линейной характеристики β=∆M/∆ω. Из (12.5) и  (12.1) получаем
(12.1) получаем  , Или
, Или  . Подставив в (12.1) значение dω/dt, полученное из (12.4), получим
. Подставив в (12.1) значение dω/dt, полученное из (12.4), получим
 или
или  .Коэффициент при производной
.Коэффициент при производной  называется электромеханической постоянной времени. Время разгона привода согласно
называется электромеханической постоянной времени. Время разгона привода согласно  и рисунку 12.3, равно
и рисунку 12.3, равно
 ,что соответствует значению ТМ. Отсюда можно считать, что ТМ представляет собой время, за которое привод разогнался бы вхолостую из состояния покоя до ω=ω0 под действием момента короткого замыкания. Для ДПТ НВ
,что соответствует значению ТМ. Отсюда можно считать, что ТМ представляет собой время, за которое привод разогнался бы вхолостую из состояния покоя до ω=ω0 под действием момента короткого замыкания. Для ДПТ НВ  ,и ТМ можно выразить через параметры Д
,и ТМ можно выразить через параметры Д  . (12.6)Уравнения для скорости и момента имеют одинаковый вид и решаются, как
. (12.6)Уравнения для скорости и момента имеют одинаковый вид и решаются, как
 . Поскольку решение представляет собой экспоненту, за время t=3TM значение х достигает 0.95 от установившегося значения, т.е. можно считать процесс завершенным.
. Поскольку решение представляет собой экспоненту, за время t=3TM значение х достигает 0.95 от установившегося значения, т.е. можно считать процесс завершенным.
46 Переходные процессы в электроприводе при L=0 и изменениях воздействующих факторов скачком. Mс, М-нелинейны. Перех. или динамич. режимом наз-тся режим работы при переходе из одного состояния привода к др., происходящему во время пуска, торможения, реверсирования и резкого приложения нагрузки на валу, при кот. происходит изменение момента нагрузки Мс и момента двигателя М. В переходном режиме электропривода одновременно и взаимосвязано м/у собой действуют перех. мех. электромагн. и тепловые процессы. Обычно тепловые процессы не учитывают и имеют место только электромагн. и мех. процессы. Электромагн. ПП вызываются электромагн. инерцией обмоток Эл. машин и аппаратов. В некоторых случаях влиянием электромагн. процессов можно принебречь, т.е. L=0 и ПП будеут опред-тся только мех. процессами, в кот. учитывается только мех. инерция движущихся масс электропривода.Все переходные процессы подчиняются механическому уравнению движения  (12.1) Искомые зависимости ω(t) и М(t) должны быть получены решением (12.1) при заданных начальных условиях. Mс, М-нелинейные.
(12.1) Искомые зависимости ω(t) и М(t) должны быть получены решением (12.1) при заданных начальных условиях. Mс, М-нелинейные.
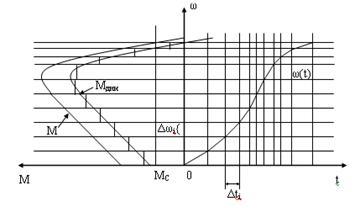
В этом случае можно воспользоваться одним из итерационных методов. Для примера приводим графо – аналитическую интерпретацию пуска АД. Статическая механическая характеристика АД М(s) строится по формуле Клосса  где
где  в диапазоне скольжений от 1 до 0 (двигательный режим). Далее рассчитывается и строится кривая динамического момента (рисунок 12.4)
в диапазоне скольжений от 1 до 0 (двигательный режим). Далее рассчитывается и строится кривая динамического момента (рисунок 12.4)  ,которая разбивается на n участков. На каждом участке динамический момент равен Мдинi. Переходя от бесконечно малых приращений к конечным приращениям, уравнение движения (3) записываем для i – го участка, как
,которая разбивается на n участков. На каждом участке динамический момент равен Мдинi. Переходя от бесконечно малых приращений к конечным приращениям, уравнение движения (3) записываем для i – го участка, как  , время пуска на каждом участке
, время пуска на каждом участке  .
.
47. Переходные процессы в ЭП с учетом электромагн. инерционности. Перех. или динамич. режимом наз-тся режим работы при переходе из одного состояния п