Из проведенного рассмотрения следует вывод, что существуют операторы, обеспечивающие управление транспортными процессами при любых начальных дислокациях. В то же время существуют и операторы, которые обеспечивают это свойство только на некотором подмножестве начальных дислокаций. Это обстоятельство может стать причиной того, что при некоторых ограниченных изменениях исходных данных, например, вследствие возмущений, процесс может стать неуправляемым или неустойчивыми. Кроме того, этот эффект может иметь место и тогда, когда возмущения оказывают воздействие не в начальный момент времени, не на исходные данные, а на само течение процесса, на элементы его организации или на сами объекты.
В таком случае проблема управляемости оказывается связанной с анализом устойчивости транспортных процессов и наоборот.
Под устойчивостью транспортного процесса можно понимать способность оператора обеспечивать бесконфликтное его протекание с одной стороны, а с другой стороны возможность достижения установившегося состояния, несмотря на воздействие различных по своему виду и величине возмущений.
Системы, обладающие подобными возможностями, должны иметь свойство вырабатывать ограниченную реакцию в ответ на ограниченное возмущение.
Пусть поставлена задача по перемещению объекта Vi из зоны А в зону В, причем известно, что этот процесс подвержен воздействию множества факторов
(х1, х2,…, хn), (3.2.1)
которые, в свою очередь могут являться функциями координат, времени и самого процесса перемещения как Vi, так и других объектов Vk. Часть из этих факторов являются управляющими воздействиями, другие же играют роль случайных возмущений.
Учитывая изложенное, целесообразно ввести понятие устойчивости по исходным данным (начальным условиям), когда начальная дислокация процесса, организуемого вполне управляющим оператором, подвергается ограниченным изменениям. Кроме того, также важное сформулировать условия, при которых обеспечивается устойчивость процесса.
Пусть течение этого процесса перемещения объектов описывается некоторой функциональной зависимостью (3.2.2)
Uк(х1, х2,…хn, tk) = f [φ1(х1, х2,…хn, tk),…,
φi(х1, х2,…хn, tk),…,φm(х1, х2,…хn, tk)], (3.2.2)
где (х1, х2,…хn) – переменные, описывающие характер протекания процесса, а tk – время на к-м шаге процесса.
Функциональная зависимость (3.2.2) реализуется с помощью соответствующего оператора. Представим выборку
< х 1, х 2,… х n, tk> =  к(3.2.3)
к(3.2.3)
в виде вектора, отнесенного к моменту времени tk.
Тогда можно сказать, что функция (3.2.2) осуществляет отображение
U0( 0)→ Uk( k), (3.2.4)
где Uk( k) – состояние транспортного процесса для к-го момента времени. Причем для каждого момента в любом процессе может возникать две ситуации: либо
Uk( k) ≠ Uk-1( k-1), (3.2.5)
либо
Uk-1( k-1) = Uk( k) = Uk+1( k+1) =…= Uk+r( k+r). (3.2.6)
Условие (3.2.5) говорит о том, что процесс к моменту времени tk не установился. Если неравенство имеет место для любого момента времени при сколь угодно большом К, то это означает, что данный процесс не устанавливается.
Условие же (3.2.6) говорит о том, что рассматриваемый процесс не меняет свое состояние, по крайней мере, на протяжении r шагов. Эта ситуация может соответствовать как случаю установления процесса, когда оказывается сформированной заключительная дислокация αр, в силу чего индекс r может принимать любое целое значение, так и случаю, когда состояние процесса может измениться все же на следующем (r+1) шаге, или (r+2)-м и так далее.
Подобное развитие событий может происходить тогда, когда используется операция ожидания ЕХ без ограничения кратности. Например, тогда, когда соседняя по ходу перемещения объекта зона занята другим объектом, вследствие чего состояние не изменяется до тех пор, пока зона не освобождается. Такое положение может сохраняться на протяжении длительного времени, хотя все-таки в определенный момент времени ситуация может поменяться и процесс будет развиваться далее, приводя к изменению дислокаций и неравенству (3.2.5).
Возникновение подобной ситуации существенно усложняет анализ устойчивости процесса, поскольку понятно появляются трудности с квалификацией ситуации: то ли процесс пришел к заключительной дислокации αр, то ли это состояние на следующем шаге (r+1) изменится и будет иметь место
Ur( r) ≠ Ur+1( r+1). (3.2.7)
Для выявления свойства системы быть устойчивой важно представлять, как она реагирует на ограниченные изменения исходных данных или возмущающих факторов. Учитывая соображения, связанные с неравенством (3.2.7), особенно важно использовать с этой целью компьютерные модели или аналитические методы.
Будем считать далее, что введена некоторая метрика, позволяющая количественно оценить величину этих изменений ρ( 'к, "к), где
'к = <х'к, х'2,…, х'n, tk>
и
"к = <х"к, х"2,…, х"n, tk>.
В таком случае, если
ρк ( 'к, "2) ≤ ∆,
то система оказывается устойчивой, если, во-первых, будет возникать заключительная дислокация
αр = αm,
то есть
Um ( "m) = Um+1 ( "m+1) = … = Um+r( "m+r),
и во-вторых, процесс носит бесконфликтный характер.
Это же существо может быть изложено с использованием понятия дислокаций.
В определенном формате начальная дислокация α0 является отображением факторов, воздействующих на характер транспортного процесса
α0(х '1, х '2,…, х 'n, 0) = α0( '0). (3.2.8)
Оператор системы порождает последовательность дислокаций, следующих из (3.2.8)
α0( '0), α1( '1),…, αi( 'i),…, αm( 'm) = αp( 'p), (3.2.9)
тогда, когда транспортный процесс управляемый и αp( 'p) заключительная дислокация.
В таком случае при выполнении условия (3.2.9)
αр = αm и Um( 'm)
взаимооднозначно соответствуют друг другу
αр = αm↔ Um( 'm)
На основании изложенного можно дать определение устойчивости процесса по начальным данным.
Пусть для заданного оператора, исходных данных
'0 = <х'1, х'2, …, х'n, 0>
и соответствующей им начальной дислокации α0( '0) выполнено условие (3.2.9), тогда транспортный процесс называется устойчивым по исходным данным, если при ограниченном изменении исходных данных
ρ( '1, "0) ≤ ∆
процесс носит бесконфликтный характер и имеется заключительная дислокация (выполнено условие (3.2.10) для последовательности
α0( "0), α1( "1),…, αi( "i),…, αm( "m) = αp( "p) (3.2.10)
В силу сложности такого объекта, как транспортные потоки, их дискретности, сложной логики функционирования представляется достаточно сложной проблема разработки аналитических априорных методов выявления свойства устойчивости или неустойчивости процессов. Однако, все же в ряде случаев это может быть сделано, хотя они достаточно очевидны.
Исходя из данного определения можно доказать утверждение о том, что транспортный процесс является устойчивым, если он формируется оператором, вполне обеспечивающим управляемый процесс.
Вывод непосредственно вытекает из определения оператора, вполне обеспечивающего управление транспортным процессом. В этом случае задача оказывается всюду определенной по исходным данным.
В таком случае возмущение не может вывести задачу за пределы области определения, откуда и следует, что процесс обязательно завершится заключительной дислокацией αр.
В данном рассуждении, разумеется, предполагается, что в ходе самого транспортного процесса последовательность дислокаций может приобретать изменения только под воздействием заданного оператора, а не внешних по отношению к нему возмущений. Иначе говоря, возмущения могут быть внесены только в исходные данные. На каждом же последующем шаге они приобретают изменения только под воздействием заданного оператора.
Следовательно, для случая вполне управляемого транспортного процесса обеспечивается также и устойчивость этого процесса.
Однако, это свойство в общем случае не может быть обеспечено для случая частично управляемого процесса. Действительно, вносимые в исходные данные изменения ∆ могут выводить их за пределы области определения и, как следствие, может быть утеряно свойство приобретать заключительную дислокацию, то есть процесс окажется и не устанавливающимся и не устойчивым, а в некоторых случаях могут возникать конфликтные ситуации.
Аналогично устойчивости транспортного процесса по исходным данным сформулируем понятие устойчивости по возмущенным переменным. В данном случае целесообразно вести речь об изменениях промежуточных данных, которые могут возникнуть на некотором К-м шаге (К ≠ 0), в результате воздействия случайных возмущающих факторов.
Пусть для транспортного процесса выполнено условие (2.5.16)
α0( '0), α1( '1),…, αк-1( 'к-1), αк( 'к), …, αm( 'm) = αp( 'p),
но на К-м шаге в процесс вносится возмущение.
Если при внесении на К-м шаге ограниченных возмущений
ρк( 'к, "к) ≤ ∆,
но при этом для последовательности дислокаций
α0( '0), α1( '1),…, αк-1( 'к-1), αк( "к), …, αm( "m) = αp( "p)
имеется заключительная дислокация (выполняется условие (3.2.9) и процесс носит бесконфликтный характер, то такой транспортный процесс называется устойчивым по возмущенным переменным.
Основываясь на этом определении, можно доказать утверждение о том, что транспортный процесс является устойчивым по возмущенным переменным, если в множестве исходных данных, входящих в область определения заданного оператора, обеспечивающего полную или частичную управляемость процессом, найдутся исходные данные "0, являющиеся прообразом "к.
Действительно, в отношении непосредственного следования
αi-1( 'i-1)→ αi( 'i),
дислокация αi( 'i) является образом αi-1( '0) в том отображении, которое реализует оператор, управляющий транспортным процессом. Элемент αi-1( 'i-1) соответственно является прообразом αi(x'i) в этом отображении.
В таком случае для возмущенных промежуточных данных "к может быть выстроена цепочка прообразов от дислокации αк( "к) до начальной дисокации α0 ( "0)
α0( "0)← α1( "1)←…← αк-1( "к-1)← αк( "к).(3.2.11)
Тогда, если исходные данные "0 оказываются из области определения заданного оператора, а он обеспечивает для этого множества исходных данных полную или частичную управляемость, то есть гарантирует переход к заключительной дислокации
α0( "0)→ α1( "1)→…→ αк-1( "к-1)→ αк( "к)→…
→ αm( "m)= αp( "p),
тогда, следовательно, и сложившийся фактически процесс
α0( '0)→ α1( '1)→…→ αк-1( 'к-1)→ αк( "к)→…
→ αm( "m)= αp( "p)
также будет иметь заключительную дислокацию, что и доказывает справедливость высказанного утверждения.
Однако, установление этого, оказываясь достаточно простым для несложных систем, в общем случае требует значительных усилий,а в некоторых случаях, когда обратное отображение является неоднозначным, оказывается просто невозможным.
В анализе устойчивости транспортных процессов, как по исходным данным, так и по возмущенным переменным определенную сложность представляет собой квалификация ситуации типа (3.2.6)
Um ( "m) = Um+1 ( "m+1) = … = Um+r( "m+r)
на предмет того: является ли это состояние установившимся окончательно или только на определенный период.
Для транспортных процессов эта квалификация может быть осуществлена на основе следующего соображения.
Пусть поставлена задача перемещения объекта V из зоны SL в зону SR, причем известно, что оператор, организующий этот процесс, обладает свойством полной управляемости.
Может быть высказано следующее утверждение. Отношение (3.2.6) характеризует окончательно установившееся состояние (заключительную дислокацию), если "m содержит в себе признак достижения цели процесса.
Действительно, в начальной дислокации α0( "0) присутствует описание исходной зоны Sl:
SlЄ α0( "0).
Заданный оператор по условию обеспечивает управление процессом
α0( "0)→ α1( "1)→…→ αi( "i)→ …→ αm( "m)= αp( "p).
В таком случае, если имя зоны SR входит в описание дислокации
SRЄ αm( "m),
то отношение
Um ( "m) = Um+1 ( "m+1) = … = Um+r( "m+r)
характеризует окончательно установившееся состояние или заключительную дислокацию
Исходя из изложенного, следует, что основное содержание понятия устойчивости транспортных процессов состоит в том, чтобы в случае ограниченного возмущения исходных или промежуточных данных всегда обеспечивалась бы возможность перехода без конфликтов к заключительному состоянию. При этом особым образом не оговаривается насколько эти заключительные состояния αp( 'p) и αp( "p) могут отличаться друг от друга при возмущенных и невозмущенных данных.
Этот принцип используется по двум причинам. Во-первых, сами модели транспортных потоков дискретны и достаточно сложны по своим свойствам, что существенно ограничивает возможности применения асимптотических подходов. Во-вторых, для систем такого типа одним из главных их качеств является возможность достижения установившегося состояния в ответ на случайные возмущения.
Очевидно, что одним из основных инструментов исследования этих проблем является компьютерное моделирование транспортных процессов.
Рассмотрим изложенные понятия на примере транспортно процесса в системе, представленной на рис.3.2.1.
Рис. 3.2.1
Будем полагать, что объект V перемещается от S0 к S3 по маршруту <S0,S1,S'1, S'2, S2, S3>c использованием нижней части петли (против часовой стрелки). Время передвижения не ограничено. Светофор Н управляется извне и находится в рабочем состоянии (включен и исправен). Прямым направлением движения для V является движение слева направо, а по петле – против часовой стрелки. Маршрут фиксирован, вследствие чего маршрутизаторы отсутствуют.
Транспортный процесс, позволяющий реализовать указанное задание, может быть организован оператором (3.2.12)
 (3.2.12)
(3.2.12)
Оператор (3.2.12) формирует этот процесс так, как это следует из последовательности дислокаций (3.2.13)
(3.2.13)
В данном транспортном процессе α23 является заключительной дислокацией
α23=αр
Из рассмотрения последовательности (3.2.13) можно сделать вывод о том, что, если только Н дает разрешение на проход, то при любых исходных данных всегда будет наступать заключительная дислокация, и значит оператор (3.2.12) вполне обеспечивает управление транспортным процессом. Из совокупности (3.2.13) также вытекает утверждение о том, что этот процесс устойчив.
Теперь изменим постановку задачи. Пусть в транспортной сети, представленной на рис. 3.2.2, реализуется параллельный процесс перемещения объекта V1 по маршруту <S0,S1,S'1, S'2, S2, S3>, а также объекта V2 по маршруту < S3, S2, S"2, S"1, S0,S1>. Прямое направление движения для объекта V1 – слева направо и против часовой стрелки по нижней части петли от S1 к S2. Прямое направление движения объекта V2 – справа налево и против часовой стрелки по верхней части петли от S2 к S1.
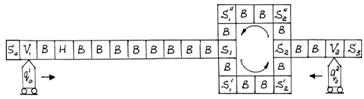
Рис. 3.2.2
Транспортный процесс по передвижению объектов V1 и V2 в сети рис.3.2.2 может быть осуществлен под управлением оператора (3.2.14)
(3.2.14)
Рассмотрим транспортный процесс, порождаемый оператором (3.2.14) и начальной дислокаций (3.2.15)
(3.2.15)
Последовательность дислокаций (3.2.16) позволяет рассмотреть то, как складывается процесс перемещения объектов V1 и V2 в этой ситуации.
(3.2.16)
(3.2.16)
В последовательности (3.2.16) дислокация α19 является заключительной
α19= αр,
и при заданном α0 процесс завершается решением поставленной задачи. Однако, тем не менее процесс может оказаться неустойчивым и не обеспечивать достижение цели.
Пусть произошло изменение исходных данных, в результате чего начальная дислокация α0 стала отличной от (3.2.15) приняв вид (3.2.17)
 (3.2.17)
(3.2.17)
В результате того, что (3.2.15) и (3.2.17) отличны друг от друга отличным образом будут складываться для этих исходных и транспортные процессы. Процесс для исходных данных (3.2.17) представлен последовательностью дислокаций (3.2.18)
(3.2.18)
(3.2.18)
(3.2.18)
(3.2.18)
Из рассмотрения последовательности (3.2.18) следует, что данный транспортный процесс оказывается неустойчивым. Дислокации
α8= α20= α32= α44=…… = α8+12к, где к=1,2,3…
могут повторяться бесконечно долго и, следовательно, заключительная дислокация не наступает никогда. Отсюда следует вывод о том, что процесс с оператором (3.2.14) неустойчив по исходным данным.
Покажем, что эта ситуация возникает также и тогда, когда имеет место возмущение по переменным при протекании самого процесса.
Пусть начальная дислокация α0 соответствует (3.2.15), то есть тому случаю, когда процесс завершался заключительной дислокаций α19. Однако, теперь в отличие от (3.2.16) на некотором шаге (путь будет α1) появляется некоторое возмущающее воздействие, состоящее в том, что на один такт светофор Н не пропускает объект V1.
Процесс, протекающий в системе, представлен последовательностью дислокаций (3.2.19)
(3.2.19)
(3.2.19)
Так же, как и в предыдущем случае, заключительная дислокация в транспортном процессе не наступает.
Дислокации
α9= α21= α33= α45=… = α9+12к, где к = 1,2,3,…
могут повторяться бесконечно долго. Таким образом, оператор (3.2.14) не обеспечивает устойчивости транспортного процесса по возмущенным переменным в заданной сети.
Принятая в операторе (3.2.14) логика управления, состоящая в том, что в узле S1 преимущественным правом движения наделяется объект V1 (объект V2 при встрече с V1 в узле S1 отходит назад до S2), а в узле S2 приоритет меняется: преимущественным правом движения уже обладает объект V2 (объект V1 при встрече с V2 в узле S2 отходит назад до S1), приводит к тому, что система не может придти к установившемуся состоянию.
При таком свойстве система оказывается склонной к образованию заторов. Действительно, если через узел S0 будут поступать регулярно объекты V3, V5, V7,…, а через узел S3 – V4, V6, V8,…, каждые 12 тактов, то они не смогут пройти через узлы S1 и S2 , в результате чего будут создаваться заторы, закупоривающие движение в данном потоке.
Это рассуждение приводит к выводу о том, что для обеспечения устойчивости должен быть проведен анализ логики оператора. В рассмотренном примере логика должна и может быть скорректирована. Последовательности дислокаций (3.2.19) и (3.2.18) дают достаточно ясное представление о том, какие могут быть использованы способы корректировки логики оператора (3.2.14), чтобы он обеспечивал устойчивый транспортный процесс.