Основной функцией электропривода является приведение в движение рабочей машины в соответствии с требованиями технологического режима. Движение это совершается механической частью электропривода (МЧ ЭП), в состав которой входит ротор электродвигателя, передаточное устройство и рабочая машина (рис. 3.1). Приведенные на рис. 3.1 параметры обозначают Мв, Мрм, Мио – моменты на валу двигателя, рабочей машины, исполнительного органа; ωв, ωрм , ωио – угловые скорости вала ЭД, рабочей машины, исполнительного органа; Fио, Vио – усилие и линейная скорость исполнительного органа. В зависимости от вида передачи и конструкций рабочей машины различают (рис. 3.1):
ЭП вращательного движения, обеспечивающий, соответственно, вращательное движение исполнительного органа РМ; выходные параметры – момент ИО механизма Мио и угло-вая частота вращения ωио;
ЭП поступательного движения, обеспечивающий поступательное линейное движение ИО рабочей машины; выходные параметры – усилие Fио и линейная скорость Vио.

Рисунок 3.1
Отметим, что существует также специальный ЭП, называемый колебательным электроприводом, обеспечивающим возвратно-поступательное (вибрационное) движение (как угловое, так и линейное) исполнительного органа РМ.
В механической части ЭП действуют различные виды усилий, моментов, различающиеся характером действия. Различают статические моменты реактивные Мср и активные Мса.
Реактивные моменты создаются силой трения, силами сжатия, растяжения, кручения неупругих тел. Классическим примером здесь может служить сухое трение (рис. 3.2). Силы трения всегда противодействуют движению и при реверсе электропривода момент трения, обусловленный этими силами, также меняет направление, а функция Мс(ω) при скорости ω = 0 претерпевает разрыв. Силы трения проявляются в передачах электродвигателя и рабочих машинах.
Активные (потенциальные) моменты создаются силой тяжести, силами сжатия, растяжения, кручения упругих тел. В МЧ ЭП активные моменты возникают в нагруженных элементах (валы, зубчатые зацепления и т.п.) при их деформации, поскольку механические связи не являются абсолютно жесткими. Особенности действия потенциальных моментов наглядно проявляются на примере силы тяжести. При подъеме или спуске груза направление силы тяжести Fj остается постоянным. Иными словами, при реверсе электропривода направление активного момента Мса сохраняется неизменным (рис. 3.3).

Рис. 3.2. Зависимость статического момента сил сухого трения от скорости
Краткий анализ видов Мс показывает, что между реактивными и активными моментами имеется существенное отличие: реактивный момент с изменением направления движения также меняет свое направление, активный же момент сохраняет его постоянным.
Рабочие машины, несмотря на большое многообразие конструкций и выполняемых операций, могут быть классифицированы по виду зависимости статического момента от ряда факторов. Можно выделить следующие основные группы механизмов.
К первой группе относятся механизмы, у которых статический момент не зависит от скорости вращения, то есть Мс(ω) = const. Это значит, что механическая характеристика рабочей машины – зависимость статического момента от частоты вращения – представляет прямую, параллельную оси угловой скорости ω, и претерпевает разрыв при ω = 0 для реактивных статических моментов (как показано на рис. 3.2), например, для ленточного транспортера с равномерной погонной нагрузкой.

Рис. 3.3. Зависимость активного статического момента от скорости, характерная для механизмов подъема грузов
Для активных Мс (как показано на рис. 3.3) механическая характеристика не зависит от направления движения. Типичным примером является механизм подъемника.
Вторая группа механизмов достаточно представительна. Здесь Мс зависит от скорости вращения РМ:
МС(ω) = МС0 + (МСН + МС0) (ω / ωн)а
(3.1)
где Мсо – момент механических потерь на трение;
Мсн – статический момент рабочей машины при номинальной скорости вращения ωн;
ω – текущая скорость вращения;
а – коэффициент пропорциональности.
При а = 0 имеем Мс(ω) = Мсн, то есть получаем механическую характеристику машин первой группы.
При а = 1 имеем линейную зависимость статического момента от скорости, что присуще, например, генераторам G постоянного тока, работающим на постоянное сопротивление R (рис. 3.4).
При а = 2 (рис. 3.5) получаем наиболее многочисленную группу рабочих механизмов], имеющих вентиляторную характеристику (вентиляторы, гребные винты, центробежные насосы и другие подобные механизмы).
При а = -1 имеет место гиперболическая зависимость, характерная для большинства металлорежущих станков, когда с увеличением скорости подачи резца V (соответственно при этом увеличивается усилие резания) снижает скорость обработки детали ω (рис. 3.6).
Отметим, что на практике встречаются и другие значения коэффициента а.

Рис. 3.4. Механическая характеристика при а = 1 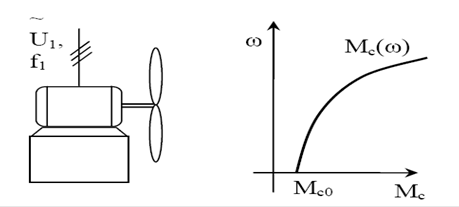
Рисунок 3.5 Вентиляторная механическая характеристика

Рис. 3.6. Гиперболическая механическая характеристика