Математические модели
Отметим три важные черты математических моделей: их универсальность (одна и та же модель может описывать различные объекты); полноту и глубину описания (математическая модель позволяет воспроизводить различные нюансы поведения исследуемого объекта); удобство компьютерной реализации (от математической модели, как правило, легко перейти к алгоритму или программе). Эти черты выделяют математические модели в отдельный класс.
Математические модели, как и другие, различаются уровнем сложности и степенью адекватности по отношению к объекту моделирования. Различают два вида математических моделей – количественные и качественные модели. Количественная модель (quantitative model) использует статические и динамические соотношения между переменными и параметрами системы для описания поведения системы в количественных математических терминах. Качественная модель (qualitative model) использует статические и динамические соотношения между переменными и параметрами системы для описания поведения системы в качественных терминах, таких как причинность или правила вида «if-then».
Основным недостатком использования качественных моделей является невозможность воспроизведения и исследования тонких физических явлений, характерных для моделируемого объекта. Успешное решение задач моделирования требует использования более содержательных, количественных моделей объектов, отражающих их динамические свойства и особенности поведения. Чем полнее математическая модель объекта, тем более тонкие вопросы ее функционирования доступны для рассмотрения.
Можно выделить следующую последовательность типовых математической моделей, расположенных по мере их усложнения:
– графические и логические модели;
– модели в виде конечных автоматов и сетей;
– линейные динамические модели;
– нелинейные динамические модели.
Графические и логические модели получили наибольшее распространение на практике в силу своей простоты и наглядности. Они хорошо отражают цепочки причинно-следственных связей между явлениями и позволяют формализовать процедуру поиска дефектов. В то же время они имеют очевидные недостатки, накладывающие ограничения на область их применения. В тех случаях, когда возможности логических моделей не позволяют обеспечить заданных требований по качеству моделирования, следует переходить к более содержательным моделям, таким как конечные автоматы, сети Петри, статические и динамические аналитические модели, полнее отображающим свойства и поведение изучаемого объекта.
Для многих технических объектов наиболее приемлемыми оказываются линейные стационарные динамические модели. С одной стороны, они достаточно просты, могут быть описаны обыкновенными линейными дифференциальными уравнениями или передаточными функциями, теория которых хорошо разработана, допускают аналитическое исследование, сравнительно просто реализуются средствами вычислительной техники. С другой стороны, они достаточно содержательны, отражают не только статические свойства объектов, но и их динамику, могут служить для описания сложных переходных процессов, таких, например, как поведение летательного аппарата на траектории при наличии внешних возмущений.
Класс технических объектов и систем, допускающих математические модели такого вида, весьма широк и включает в себя разнообразные системы управления, исполнительные устройства, измерительные датчики, системы обработки, хранения и передачи информации, системы с сосредоточенными и распределенными параметрами, механические, гидравлические, электрические, электронные устройства и т. п.
Математические модели можно классифицировать и по другим признакам. Например, по числу входных и выходных переменных они делятся на одномерные, имеющие один вход и один выход (SISO-системы), и многомерные, имеющие несколько входов и несколько выходов (MIMO-системы). По наличию памяти различают статические и динамические объекты. У статических объектов выходной сигнал в текущий момент времени однозначно определяется значением входного сигнала в этот же момент времени. У динамических объектов, напротив, выходной сигнал в текущий момент времени зависит от значений входного сигнала в этот и предыдущие моменты времени. В зависимости от вида используемых моделей можно выделить непрерывные и дискретные, детерминированные и вероятностные (стохастические) модели.
Классификация математических моделей по этим и другим признакам поясняет рис. 1.4.
Прокомментируем только верхний уровень классификации. Он отражает деление моделей по характеру зависимых и независимых переменных (дискретные, непрерывные). Вопросы связи дискретного и непрерывного возникают при делении моделей на аналоговые, цифровые и гибридные. Признаком классификации здесь является способ представления информации – в виде непрерывной (аналоговой) величины или в цифровом виде.
Деление математических моделей на аналоговые и цифровые отражает двойственную, дуальную природу окружающего нас мира и имеет глубокие философские истоки. Вопрос о том, в каком мире мы живем – непрерывном или дискретном – волновал еще древнегреческих философов. Здесь можно упомянуть Демокрита, отстаивающего корпускулярную теорию строения вещества; Зенона, апории которого об Ахиллесе и черепахе, о стреле были направлены на выяснение структуры бесконечно малых интервалов времени и пространства и др. В XVIII–XIX веках широкую известность получила физическая и философская дискуссия о природе света, в которой приняли участие крупнейшие ученые мира. Результатом дискуссии явилось признание двойственной природы света – волновой и корпускулярной одновременно. Тонкими и убедительными опытами было показано, что в одних случаях свет ведет себя как поток квантов, в других – как непрерывное волновое излучение (волны электромагнитного поля определенной частоты).
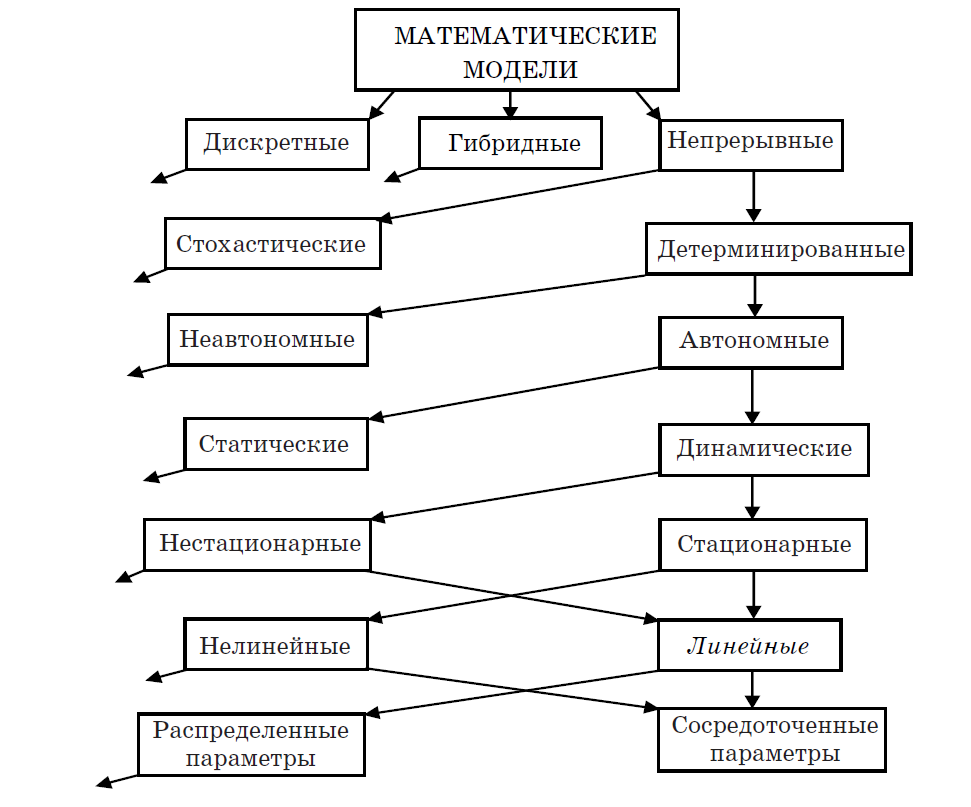
Рис. 1.4. Виды математических моделей
Этот вывод важен с философской точки зрения, поскольку он указывает на единство непрерывного и дискретного в природе. Показательно, что вычислительная техника не явилась исключением в этом отношении. По-видимому, можно утверждать, что наиболее полно отражают природу гибридные модели, объединяющие дискретный и непрерывный подход.
В гибридных моделях возможны различные сочетания способов представления времени и сигналов (табл. 1.1).
Таблица 1.1
Типы гибридных моделей
| Сигналы | Время | ||
| непрерывное | дискретное | ||
| Аналоговые | Аналоговые модели (1) | Гибридные модели (2) | |
| Гибридные | Гибридные модели (3) | Гибридные модели (4) | |
| Цифровые | Гибридные модели (5) | Цифровые модели (6) | |
Из таблицы видно, что возможны различные типы гибридных моделей. Например, группе (2) соответствуют модели, в которых амплитуда сигналов может меняться непрерывно, но сами сигналы представляют собой последовательность импульсов, которые могут появляться в дискретные моменты времени. Группам (3) и (4) соответствуют модели с гибридным представлением сигналов, когда, например, порядок числа задается в цифровой форме, а мантисса – в аналоговой, или целая часть – цифровая, а дробная – аналоговая и т. д. К группе (5) относятся модели, в которых сигнал может изменяться в любой момент времени, но принимает лишь конечное число значений. Выбор того или иного типа моделей для исследования должен определяться структурой задачи и тем, насколько адекватно она отражается на структуру модели.