Всем привет. В данный момент я работаю инструктором по риггингу в онлайн школе CGTarian, поэтому если хотите более подробно разобраться в этой и других темах – милости просим на курсы!
Темой нашего сегодняшнего урока будет использование корректирующих блендшейпов в сложных ситуациях, таких как плечи или бедра. Ввиду специфики данного урока, предполагаю более или менее знающих читателей, разбирающихся в таких понятиях как деформер или блендшейп.
Я рассматриваю только стандартные возможности Maya + дополнительные скрипты и не умаляю достоинств таких интересных инструментов для работы с деформациями как poseDeformer. В конце концов, не все имеют возможность использовать сторонние плагины в своих сценах (например, если над сценой работают много разных людей вне студии или сценку нужно будет передать кому-то неквалифицированному).

Как вы, надеюсь, знаете, основная проблема настройки корректирующих блендшейпов (коррект блендов) сводится к определению веса нужного бленда, то есть нужно четко знать когда он включается, а когда нет.
С локтем, скажем, все более или менее понятно – мы привязываем вес бленда к углу предплечья (локтя), а так как оно у нас вращается всего по одной оси, то и проблем с весом у нас нет – driven key решит все проблемы.
А как быть с такими областями как плечи или бедра, ведь они вращаются по всем трем осям? Да, здесь в лоб проблему не решить, так как нельзя привязываться к конкретным осям из-за специфики вычисления вращений – будут возникать скачки в значениях.
Но я придумал замечательный и очень гибкий способ настройки весов в таких случаях. Основная идея – мы привязываемся не к конкретным значениям, а к областям в пространстве – позам.
Давайте рассмотрим такого вот персонажа.

В качестве примера разберем создание корректирующих блендшейпов на бедра. Нам понадобится набор замоделенных поз в виде коррект блендов (для этого используем скрипт BSspiritCorrectiveShape).
На данный момент мы имеем персонажа и набор поз со сгенерированными корректирующими вариантами.

Я остановился на таких позициях ноги: поднята в сторону, поднята вперед/назад и среднее положение между «поднята в сторону» и «поднята вперед». Выбранные позы позволят нам получить адекватные деформации в не слишком критических положениях. Если же персонаж по сюжету должен выполнять какие-либо акробатические трюки, то тут, конечно, без поз на критические положения не обойтись. В общем я вам расскажу суть, а как и где применять данную технологию решать вам.
Итак, наша система построена не на привязке к углам, а на анализе расстояния между позами и некой точкой – осью.
Каждая поза идентифицирует положение оси в пространстве и на основании расстояния до оси формирует весовой коэффициент.
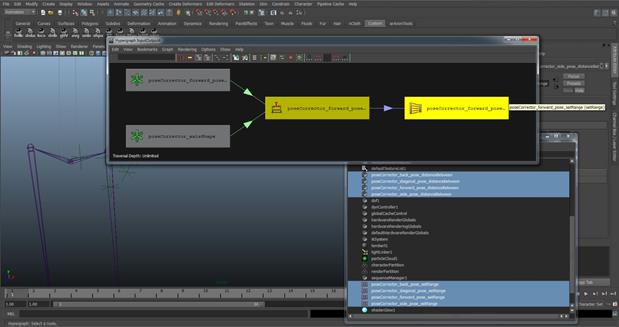
Целиком система poseCorrector состоит из оси и набора поз, которые между собой смешиваются. Интепроляция в пределах системы нормализирована, то есть не позволяет вершинам принимать вес > 1 от всех поз (нет наложений блендов).
В сцене система выглядит так.

Общая группа poseCorrector позиционируется на бедренную кость и через orientConstraint (с maintain offset) управляется тазовой костью.
poseCorrector_axis_group через orientConstraint (без maintain offset) управляется костью ноги.
poseCorrector_axis – локатор, который находится в группе и слегка сдвинут в направлении ноги по оси X. Таким образом мы как бы формируем вектор ноги.
Локаторы poseCorrector_side_pose, poseCorrector_forward_pose, poseCorrector_back_pose, poseCorrector_diagonal_pose – собственно позы, которые делались дубликатом poseCorrector_axis в тех положениях ноги, где делались корректирующие бленды.
Каждая поза имеет атрибут radius, который будет управлять областью ее влияния.
Что у нас получилась за ерунда? На самом деле все очень просто. Проще, чем кажется.
Начинаю вращать ногой – poseCorrector_axis точно направлен по бедру и не меняет своего положения при вращении ноги вокруг своей оси.
То есть положение оси точно идентифицирует ногу в данном положении и нам не важно как именно она повернута по каналам rotate.
Теперь нужно получить расстояния от оси до всех поз для построения весовых коэффициентов.
Делается это через ноду distanceBetween: createNode distanceBetween;
Нам нужны расстояния до каждой позы, поэтому дистансБитвинов столько, сколько и поз (в нашем случае 4).
Коннекты такие: point1 – poseCorrector_axis.worldPosition (шейп у локатора смотрите), point2 – worldPosition от позы.
Помимо этого нам понадобятся ноды setRange для каждой позы (тоже 4) для превращения расстояния в весовой коэффициент: createNode setRange;
Соединяем расстояние от оси до позы (distanceBetween.distance) в setRange.valueX.
Также коннектим радиус позы (pose.radius) в setRange.oldMaxX.
Остальные значения такие: oldMinX = 0, minX = 1, maxX = 0.
Что мы получили? Теперь нода setRange для каждой позы возвращает число от 0 до 1 в зависимости от радиуса влияния позы и положения оси (преобразовали диапазон от 0 до radius в диапазон от 0 до 1). Что ж – неплохо.
Не поверите, почти все!!! 
Теперь в общем-то можно коннектить setRange.outValueX каждой позы в соответствующий канал корректирующего бленда и деформации будут достаточно контролируемы, но мы пойдем дальше.
Хоть все и работает, но без нормализации очень трудно подобрать радиусы влияния для каждого бленда – корректы налазят друг на друга в промежуточных позициях и вследствие этого возникают сильные и непонятные движения вершин. В идеале должно быть так, чтобы вес всех поз на вершину был не больше 1. Это называется нормализацией.
Данная функция тоже выполняется достаточно просто: суммируем веса всех поз и делим вес нужной позы на эту сумму.
Скажем, у нас такие веса: 0.3, 0.5, 0.8. Если их сложить, то получится 1.6.
Нормализируем: 0.3 / 1.6 = 0.1875, 0.5 / 1.6 = 0.3125, 0.8 / 1.6 = 0.5.
Вот, новые веса, а точнее коэффициенты весов, нам и нужны.
Суммируем веса, к примеру, нодой blendWeighted: createNode blendWeighted;
Коннетим вес каждой позы в свободный инпут blendWeighted ноды:
connectAttr setRange.outValueX blendWeighted.i[0,1 и т.д.]; // Теперь у нас есть сумма весов всех поз.
А что делать, если нога в таком положении, где ни одна из поз не действует? Тогда у нас будет деление на 0. Чтобы этого избежать мы включим проверку на отсутствие включенных блендов.
Делаем через ноду condition: createNode condition;
Операцию у кондишна ставим «greater then» (>). Коннектим сумму весов (blendWeighted.output) в каналы firstTerm и colorIfTrueR.
Нода условия теперь возвращает сумму весов, если хотя бы одна из поз включена или 1 (1 – значение по умолчанию в атрибуте colorIfFalseR).
Далее, для каждой ноды необходимо теперь делением получить коэффициент:createNode multiplyDivide;
Операцию ставим «/» (деление). В input1X коннектим вес позы (setRange нода), а в input2X – сумму весов от кондишна (condition.outColorR).
Теперь нода multiplyDivide для каждой позы возвращает весовой коэффициент, но не сам вес. Для получения веса позы умножим этот коэффициент на начальный вес позы (setRange): createNode multDoubleLinear;
В input1 коннектим вес позы (нода setRange), в input2 – весовой коэффициент (multiplyDivide.outputX). Отлично!
Все, коннектим multDoubleLinear.output каждой позы в соответствующий вес корректирующего бленда в узле blendShape.
Подправляем радиусы и радуемся хорошим деформациям.
 Очень надеюсь, что вы разобрались с технологией и уже начали использовать корректирующие блендшейпы везде где только возможно
Очень надеюсь, что вы разобрались с технологией и уже начали использовать корректирующие блендшейпы везде где только возможно
Анимация в Тракс Эдиторе на мой взгляд самый простой и мощный способ анимации в Майя.Помагает решить множество проблем (прокрутка ног при ходьбе,возня с кривыми и ключами,взаимодействие с обьектами (шляпами стаканами очками пистолетами молотками)простми и эфективными способами.Сначала подготавливаем простой скелет.Позвоночник(снизу верх) Базовая кость,пояс,грудь,шея,макушка(итого 5 костей)Нога- от бедра вниз(бедро,колено,пятка,ступня,носок- 5 костей)Парентим бедро к базовой кости.Выделяем ногу делаем мирор костям. Вторая нога готова.Руку на уровне грудной кости.Руки в сторны -поза.Плечо,локоть,кисть,ладонь.От кости "ладонь"
в сторну большой палец из трех костей,и еще три пальца основных -тоже каждый из трех костей.(мультяшная рука всегда с четырмя пальцами_традиция) Паренитм кость "плечо" к кости "грудь " Выделяем руку,делаем мирор джойнт(зеркальное отражение костям) вторая рука готова.И скелет тоже готов.Так как мы работать будем с клипами то избавляемся от кучи ненужной работы. Настройки костей.Настройки констрейнов (упровляющих обьектов)Оснастка самая простая По два хэндла на ноги и все.Остальные кости будем крутить на прямую.Значит делаем хэндл на ногу.Клик в бедро,клик в пятку.Первый хэндл.Клик в пятку, клик в носок.Второй хэндл.На вторй ног тоже самое
Теперь берем три локатора.Один помеещаем под правой ногой посреди ступни,вторй под левой ногой посреди ступни.Третий локатор вставляем в центр базовой(паховой)кости.Паренитм "базу" к локатору.Переходим к ногам. Парентим хэндл пятки к локатору,парентим хэндл носка к локатору.На другой ноге тож самое. Скелет готов.Что имеем.Берем базовый локатор.Тягаем в разные сторны Видите как гибко работают ноги и бедра..При этом не проваливаясь под землю.Возьмите ножной локатор видите как класно работает нога (но без фанатизма таскайте как ногу человека в пределах разумного а то её будет крутитьв колене)
Тепрь нам надо сделать персонаж для Тракса Эдитора.Открываем Гиперграф..Выделяем в нем все Все!!!все обьекты Хэндлы кости эффекторы.отмечаем в Атрибуте эдиторе (помните что это _это окошко сбоку где все атрибуты обьектов находятся Так вот там (счас важно!)выделяете курсором (проводите по строчкам снизу верх,выделеные строчки С НАЗВАНИЯМИ АТРИБУТОВ(rotete/translate/)станут черными.Итак в ГипереГрафе выделены обьекты в Атрибутах выделены названия атрибутов идем в раздел Animation-Character-create character (щелкаем на кубик рядом)в появившемся окне даем название персонажу И вот у нас имеется Скелет готвый к анимации методом поз и клипов..Продолжение следует
Фрагменты сделаные с помощью Тракса Эдитора.https://www.youtube.com/watch?v=zyA7NKtsMlg https://www.youtube.com/watch?v=0SD5BOyQRZc