Вариант 7.
Группы соединения трансформаторов.
Применением разных способов соединения обмоток в трехфазных трансформаторах можно создать 12 различных групп соединения.
При соединении обмоток «звезда—треугольник», показанном на рис. 1.1, а, имеет место группа 11 (Y/∆-11). Если же поменять местами начала и концы фазных обмоток НН, то вектор  повернется на 180° и трансформатор будет относиться к группе 5 (Y/∆-5) (рис. 1.1, б).
повернется на 180° и трансформатор будет относиться к группе 5 (Y/∆-5) (рис. 1.1, б).
При одинаковых схемах соединения обмоток ВН и НН, например Y/Y и ∆/∆, получают четные группы соединения, а при неодинаковых схемах, например Y/∆ или ∆/Y, — нечетные.

Рисунок 1.1 – Схемы соединения обмоток и векторные диаграммы: а – для группы Y/Д-11; б – для группы Y/Д-5.
Рассмотренные группы соединения (0, 6, 11 и 5) называют основными. Из каждой основной группы соединения методом круговой перемаркировки выводов на одной стороне трансформатора, например на стороне НН (без изменения схемы соединения), можно получить по две производные группы. Например, если в трансформаторе с группой соединения Y/Y-0 выводы обмотки НН перемаркировать и вместо последовательности аbс принять последовательность саb, то вектор ЭДС повернется на 120°, при этом получим группу соединения Y/Y-4. Если же выводы обмоток НН перемаркировать в последовательность bса, то вектор повернется еще на 120°, а всего на 240°; получим группу Y/Y-8.
Основные группы соединения имеют некоторое преимущество перед производными, так как предусматривают одноименную маркировку выводов обмоток, расположенных на одном стержне. Это уменьшает вероятность ошибочных присоединений.
Угол смещения вектора линейной ЭДС обмотки НН по отношению к вектору линейной ЭДС обмотки ВН определяют умножением числа, обозначающего группу соединения, на 30°. Угол смещения отсчитывают от вектора ЭДС обмотки ВН по часовой стрелке до вектора ЭДС обмотки НН. Например, группа соединения 5 указывает, что вектор ЭДС НН отстает по фазе от вектора ЭДС ВН на угол 5·30° = 150°.

Рисунок 1.2 – Сравнение положения стрелок часов с обозначением групп соединения.
Рабочие характеристики двигателя постоянного тока параллельного и последовательного возбуждения.
Эксплуатационные свойства двигателя определяются его рабочими характеристиками, под которыми понимают зависимость частоты вращения n, тока I, полезного момента M2, вращающего момента M от мощности на валу двигателя Р2 при  и
и  (рис. 2.1, 6).
(рис. 2.1, 6).
Из скоростной характеристики видно, что частота вращения двигателя с ростом нагрузки Р2 уменьшается, а график  приобретает падающий вид с небольшой выпуклостью, обращенной к оси абсцисс. Если же реакция якоря в двигателе сопровождается более значительным ослаблением потока Ф, то частота вращения с увеличением нагрузки будет возрастать, как это показано штриховой кривой на рис. 2.1, б. Однако такая зависимость является нежелательной, так как она, как правило, не удовлетворяет условию устойчивой работы двигателя: с ростом нагрузки на двигатель возрастает частота вращения, что ведет к дополнительному росту нагрузки и т. д., т. е. частота вращения n двигателя неограниченно увеличивается и двигатель идет «в разнос». Чтобы обеспечить характеристике частоты вращения форму падающей кривой, в некоторых двигателях параллельного возбуждения применяют легкую (с небольшим числом витков) последовательную обмотку возбуждения, которую называют стабилизирующей обмоткой. При включении этой обмотки согласованно с параллельной обмоткой возбуждения ее МДС компенсирует размагничивающее действие реакции якоря так, что поток Ф во всем диапазоне нагрузок остается практически неизменным.
приобретает падающий вид с небольшой выпуклостью, обращенной к оси абсцисс. Если же реакция якоря в двигателе сопровождается более значительным ослаблением потока Ф, то частота вращения с увеличением нагрузки будет возрастать, как это показано штриховой кривой на рис. 2.1, б. Однако такая зависимость является нежелательной, так как она, как правило, не удовлетворяет условию устойчивой работы двигателя: с ростом нагрузки на двигатель возрастает частота вращения, что ведет к дополнительному росту нагрузки и т. д., т. е. частота вращения n двигателя неограниченно увеличивается и двигатель идет «в разнос». Чтобы обеспечить характеристике частоты вращения форму падающей кривой, в некоторых двигателях параллельного возбуждения применяют легкую (с небольшим числом витков) последовательную обмотку возбуждения, которую называют стабилизирующей обмоткой. При включении этой обмотки согласованно с параллельной обмоткой возбуждения ее МДС компенсирует размагничивающее действие реакции якоря так, что поток Ф во всем диапазоне нагрузок остается практически неизменным.

Рисунок 2.1. Схема двигателя параллельного возбуждения ( )
)
и его рабочие характеристики ( )
)
На рис. 2.2, б представлены рабочие характеристики  и
и  двигателя последовательного возбуждения. При больших нагрузках наступает насыщение магнитной системы двигателя. В этом случае магнитный поток при возрастании нагрузки практически не изменяется и характеристики двигателя приобретают почти прямолинейный характер. Характеристика частоты вращения двигателя последовательного возбуждения показывает, что частота вращения двигателя значительно меняется при изменениях нагрузки. Такую характеристику принято называть мягкой.
двигателя последовательного возбуждения. При больших нагрузках наступает насыщение магнитной системы двигателя. В этом случае магнитный поток при возрастании нагрузки практически не изменяется и характеристики двигателя приобретают почти прямолинейный характер. Характеристика частоты вращения двигателя последовательного возбуждения показывает, что частота вращения двигателя значительно меняется при изменениях нагрузки. Такую характеристику принято называть мягкой.
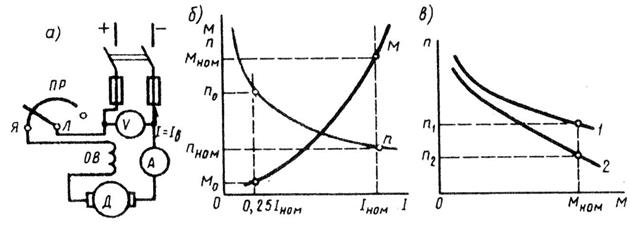
Рисунок 2.2 - Двигатель последовательного возбуждения:
а — принципиальная схема; б — рабочие характеристики; в — механические характеристики; 1 — естественная характеристика; 2 — искусственная характеристика.
При уменьшении нагрузки двигателя последовательного возбуждения частота вращения резко увеличивается и при нагрузке меньше 25% от номинальной может достигнуть опасных для двигателя значений («разнос»). Поэтому работа двигателя последовательного возбуждения или его пуск при нагрузке на валу меньше 25% от номинальной недопустима.
Для более надежной работы вал двигателя последовательного возбуждения должен быть жестко соединен с рабочим механизмом посредством муфты и зубчатой передачи. Применение ременной передачи недопустимо, так как при обрыве или сбросе ремня может произойти «разнос» двигателя. Учитывая возможность работы двигателя на повышенных частотах вращения, двигатели последовательного возбуждения, согласно ГОСТу, подвергают испытанию в течение 2 мин на превышение частоты вращения на 20% сверх максимальной, указанной на заводском щите, но не меньше чем на 50% сверх номинальной.