Лекция 4
К цельноповоротному оперению относятся как киль, так и стабилизатор. При этом цельноповоротные кили применяются значительно реже, чем стабилизаторы, и их конструктивно-силовая схема принципиально ничем не отличается от схемы стабилизатора.

 |
Рис. 1 Рис. 2
Рассмотрим конструктивно- силовые схемы, схемы стыковки и привода цельноповоротных поверхностей оперения. В конструкциях этих поверхностей применяются две схемы размещения подшипников оси вращения, которые во многом определяют конструктивно-силовые схемы этих поверхностей.
В первой схеме (рис.1,а) подшипники устанавливают на силовых шпангоутах фюзеляжа (или лонжеронах киля), ось неподвижно связана с конструкцией стабилизатора. Во второй схеме (рис.1,б) ось неподвижно связана с конструкцией фюзеляжа, а подшипники устанавливают в самом стабилизаторе.
Конструктивные особенности первой схемы связаны с тем, что все виды нагрузок (изгибающий и крутящий моменты, перерезывающая и нормальная силы), действующих на стабилизатор, передаются на фюзеляж только через одну ось, которую поэтому вне стабилизатора выполняют трубчатого сечения. У бортовой
нервюры внутри стабилизатора трубчатое сечение оси переводится в двутавровое сечение лонжерона стабилизатора, которое лучше воспринимает изгиб, а крутящий момент воспринимается контуром стабилизатора. Очевидно, что для обеспечения наименьшей массы оси при ее наибольшей жесткости необходимо проектировать ось максимально большого диаметра. Для этого ее необходимо устанавливать в месте наибольшей толщины профилей стабилизатора. Однако, как следует из рис.2, при таком положении прямой оси (А) расстояние от нее до центра давления стреловидного стабилизатора, особенно на сверхзвуковых скоростях, получается очень большим и, следовательно, большим будет шарнирный момент стабилизатора. Если для уменьшения шарнирного момента установить прямую ось стреловидного стабилизатора таким образом, чтобы она проходила приблизительно посередине между положениями центра давления при дозвуковых и сверхзвуковых скоростях (Б), то шарнирные моменты стабилизатора существенно уменьшатся, но обеспечить прочность (и особенно жесткость) оси вследствие малой строительной высоты в хвостовой части профиля практически невозможно.
Поэтому при проектировании цельноповоротных поверхностей оперения с большим углом стреловидности их ось часто устанавливают с некоторым углом стреловидности  , как показано на рис.2 (положение С), а также в схемах, приведенных на рис.1. При таком положении оси обеспечиваются как размещение ее приблизительно по линии максимальных толщин профилей, так и наименьшие значения шарнирных моментов.
, как показано на рис.2 (положение С), а также в схемах, приведенных на рис.1. При таком положении оси обеспечиваются как размещение ее приблизительно по линии максимальных толщин профилей, так и наименьшие значения шарнирных моментов.
Однако выбор стреловидности оси вращения цельноповоротных поверхностей управления не настолько прост, как это может показаться. Дело в том, что при этом выборе приходится учитывать и ряд других важных факторов (потребную мощность привода, эффективность поворотной поверхности и создаваемое ею сопротивление, конструктивную сложность выполнения узлов крепления и привода и др.).
С увеличением угла стреловидности оси расстояние от этой оси до центров давлений поверхности управления первоначально уменьшается, а затем вновь начинает увеличиваться. Аналогично меняется и величина шарнирного момента.
Изменение действующих на поверхность управления аэродинамических сил, а следовательно, и ее эффективность как органа управления, определяется изменением угла установки этой поверхности в набегающем потоке ( ), а не угла поворота оси (
), а не угла поворота оси ( ).
).
Эти углы связаны соотношением  из которого следует, что при увеличении угла стреловидности оси для сохранения неизменными характеристик управляемости необходимо увеличить как сами углы поворота оси, так и скорость их изменения
из которого следует, что при увеличении угла стреловидности оси для сохранения неизменными характеристик управляемости необходимо увеличить как сами углы поворота оси, так и скорость их изменения  (для неизменности времени перекладки).
(для неизменности времени перекладки).
Вследствие этого увеличивается и потребная мощность привода.
Таким образом, для каждой формы стреловидной поверхности управления определяется оптимальный угол стреловидности оси ее вращения из условия минимальной потребной мощности привода  .
.
Аэродинамическое качество поверхности управления характеризуется соотношением между составляющими аэродинамических сил, направленными перпендикулярно потоку (полезная подъемная сила, используемая для создания управляющих моментов) и вдоль него (вредная сила сопротивления).
С ростом стреловидности оси вращения эта характеристика заметно ухудшается, поскольку с ростом стреловидности оси отклоняемая поверхность все больше поворачивается не «поперек потока», а «в потоке».
Наряду с ухудшением аэродинамического качества применение поверхностей управления со стреловидной осью вращения вызывает ряд конструктивных трудностей, связанных с необходимостью разделения осей для правой и левой половин стабилизатора, а также с ростом потребных углов поворота этих осей при увеличении их стреловидности.
Если ось общая, то изгибающие моменты с правой и левой консолей стабилизатора замыкаются на ней и на фюзеляж не передаются. Поэтому, если ось прямая, конструкция стыковых узлов и шпангоутов получается наиболее легкой. Кроме того, в этом случае легко осуществляется компоновка привода стабилизатора, так как закрепленный на оси рычаг качается в плоскости, параллельной оси самолета. Поэтому силовые приводы стабилизатора (гидроусилители) легко компонуются даже в достаточно узком пространстве между бортом фюзеляжа и расположенным внутри двигателем, что часто бывает на легких сверхзвуковых самолетах.
При выполнении стреловидных осей разрезными, рычаги, связанные со стреловидными осями, качаются в пересекающихся плоскостях, расположенных под углами к продольной оси самолета (см. рис.1). Поэтому гидроусилители могут устанавливаться горизонтально только либо выше, либо ниже установленных в хвостовой части фюзеляжа двигателей. Если стабилизатор установлен в среднем положении относительно фюзеляжа, компоновка гидроусилителей в достаточно узком пространстве между бортами фюзеляжа и двигателями весьма затруднена и предпочтительным их положением является вертикальное.
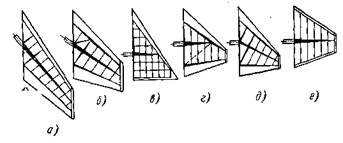 Перечисленные выше недостатки схем цельноповоротных поверхностей управления со стреловидными осями вращения зачастую практически сводят на нет выигрыш от уменьшения шарнирных моментов. В связи с этим все большее распространение получает схема цельноповоротных поверхностей управления с нестреловидной осью вращения. Для уменьшения шарнирных моментов при нестреловидной оси вращения цельноповоротных поверхностей управления применяется специальная форма этих поверхностей в плане (треугольная или трапециевидная малого удлинения с весьма тонкими профилями, как, например, на рис.3, в, г, д, е).
Перечисленные выше недостатки схем цельноповоротных поверхностей управления со стреловидными осями вращения зачастую практически сводят на нет выигрыш от уменьшения шарнирных моментов. В связи с этим все большее распространение получает схема цельноповоротных поверхностей управления с нестреловидной осью вращения. Для уменьшения шарнирных моментов при нестреловидной оси вращения цельноповоротных поверхностей управления применяется специальная форма этих поверхностей в плане (треугольная или трапециевидная малого удлинения с весьма тонкими профилями, как, например, на рис.3, в, г, д, е).
а — при стреловидной форме с большим углом стреловидности; б — при сравнительно небольшой стреловидности;
в — при треугольном оперении; г, д — различные варианты силовых схем оперения малого удлинения с небольшой стреловидностью (на схеме г пунктиром показана применяемая иногда в подобных схемах косая нервюра);
е — нестреловидное оперение малого удлинения.
Рис. 3
Поскольку ось вращения цельноповоротных поверхностей управления для уменьшения величин шарнирных моментов, как правило, располагается между центрами давления при до- и сверхзвуковых скоростях, то на режимах полета с дозвуковыми скоростями такие поверхности оказываются перекомпенсированными (статически неустойчивыми, так как шарнирный момент стремится все дальше отклонять их от исходного положения).
Это исключает возможность использования перехода на аварийное безбустерное управление и для повышения безопасности полета заставляет применять более высокие степени резервирования приводов.
Наиболее часто применяемые конструктивно-силовые схемы цельноповоротных поверхностей управления с заделанной осью (подшипники в фюзеляже) показаны на рис.3.