С помощью регулирующего микропроцессорного контроллера строится кривая разгона уже по известным значениям времени запаздывания τз=1,5 с и времени разгона Тоб=5с. Модель составляется в виде программы для контроллера Ремиконт Р-130.
Передаточная функция последовательного соединения двух инерционных звеньев первого порядка имеет вид:
Общий вид структурной схемы модели объекта управления:
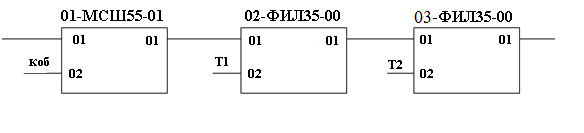
Рисунок 6– Схема конфигурации алгоритмов для моделирования ОУ с самовыравниванием и переходным запаздыванием
Таблица 2.1. - Состав конфигураций
| № алгоблока | Код алгоритма | Название алгоритма | Модификатор | Масштаб времени |
| МСШ | - | |||
| ФИЛ | - | |||
| ФИЛ | - |
Таблица 2.2.–Конфигурация алгоблоков
| № алгоблока приемника | № входа алгоблока приемника | Инверсия | № алгоблока источника | № выхода алгоблока источника |
| т.п. | ||||
| т.п. |
Таблица 2.3.- Настройка алгоритмов
| № алгоблока | Название алгоритма | № настроечного входа | Название параметра настройки | Численное значение |
| Продолжение таблицы 2.3. | ||||
| МСШ | КОБ | 1,5 | ||
| ФИЛ | 
| 5,0 | ||
| ФИЛ | 
| 1,5 | ||
| МСШ | X |
По полученным данным составляется таблица 4 и строится график
на рисунке 6.
Таблица 2.4. – Экспериментальное изменение выходной величины во времени
| T,c | Y(t) | T,c | Y(t) | T,c | Y(t) | T,c | Y(t) | T,c | Y(t) |
| 8,5 | 12,4 | 13,56 | 13,9 | ||||||
| 0,01 | 8,7 | 12,48 | 13,58 | 13,91 | |||||
| 0,29 | 8,9 | 12,53 | 13,59 | 13,91 | |||||
| 0,47 | 9,1 | 12,59 | 13,62 | 13,91 | |||||
| 0,78 | 9,3 | 12,65 | 13,63 | 13,92 | |||||
| 9,5 | 12,7 | 13,64 | 13,92 | ||||||
| 1,26 | 9,7 | 12,76 | 13,67 | 13,92 | |||||
| 1,6 | 9,8 | 12,81 | 13,68 | 13,94 | |||||
| 1,9 | 12,87 | 13,69 | 13,94 | ||||||
| 2,2 | 10,1 | 12,91 | 13,7 | 13,95 | |||||
| 2,6 | 10,3 | 12,96 | 13,72 | 13,95 | |||||
| 2,9 | 10,5 | 13,73 | 13,95 | ||||||
| 3,3 | 10,6 | 13,03 | 13,74 | 13,96 | |||||
| 3,6 | 10,7 | 13,08 | 13,75 | 13,96 | |||||
| 10,9 | 13,12 | 13,78 | 13,96 | ||||||
| 4,3 | 13,15 | 13,79 | 13,96 | ||||||
| 4,6 | 11,15 | 13,19 | 13,8 | 13,97 | |||||
| 4,9 | 11,25 | 13,23 | 13,81 | 13,97 | |||||
| 5,3 | 11,37 | 13,26 | 13,83 | 13,98 | |||||
| 5,6 | 11,47 | 13,29 | 13,84 | 13,98 | |||||
| 5,9 | 11,58 | 13,33 | 13,84 | 13,99 | |||||
| 6,2 | 11,66 | 13,35 | 13,85 | ||||||
| 6,5 | 11,76 | 13,37 | 13,86 | - | - | ||||
| 6,7 | 11,85 | 13,4 | 13,86 | - | - | ||||
| 7,1 | 11,95 | 13,42 | 13,87 | - | - | ||||
| 7,3 | 12,03 | 13,45 | 13,87 | - | - | ||||
| 7,5 | 12,13 | 13,47 | 13,89 | - | - | ||||
| 7,8 | 12,19 | 13,5 | 13,89 | - | - | ||||
| 12,26 | 13,52 | 13,9 | - | - | |||||
| 8,3 | 12,34 | 13,53 | 13,9 | - | - |
На основании полученных данных строим экспериментальную кривую разгона рисунок 7.
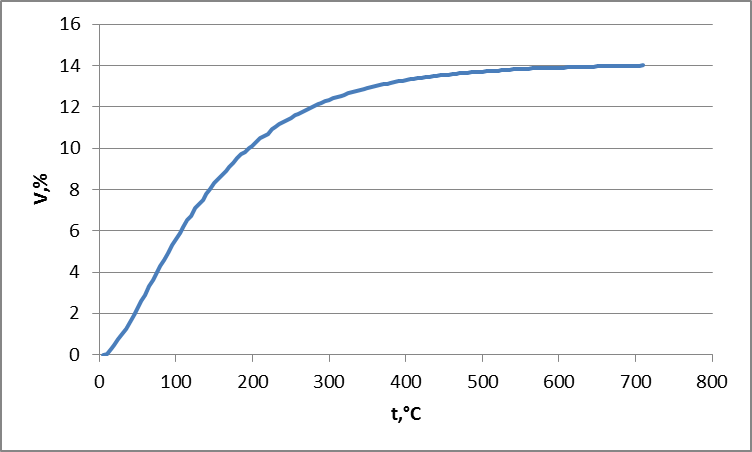
Рисунок 7-Экспериментальная кривая разгона
Из графика видно, что кривая разгона имеет возрастающий характер.
Расчетная траектория изменения выходной величины рассчитывается по формуле:
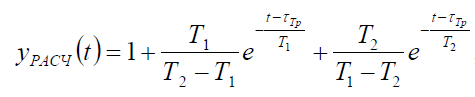 ,
,
Где:
τтр=0 – транспортное запаздывание;
T1=5 - постоянная времени объекта:
Т2=1,5 - постоянная времени объекта;
t - время.
Полученные данные записываются в таблицу4 и строится расчетная кривая разгона на рисунке 4.
Итоговое yрасч с подставленными коэффициентами:
yрасч= 
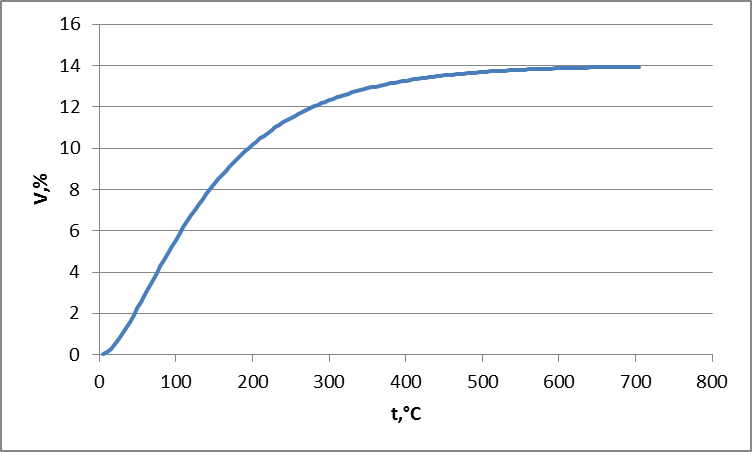
Рисунок 8-Расчетная кривая разгона
Для сравнения экспериментальная и расчетная кривые разгона строятся на одном графике, рисунок 9.
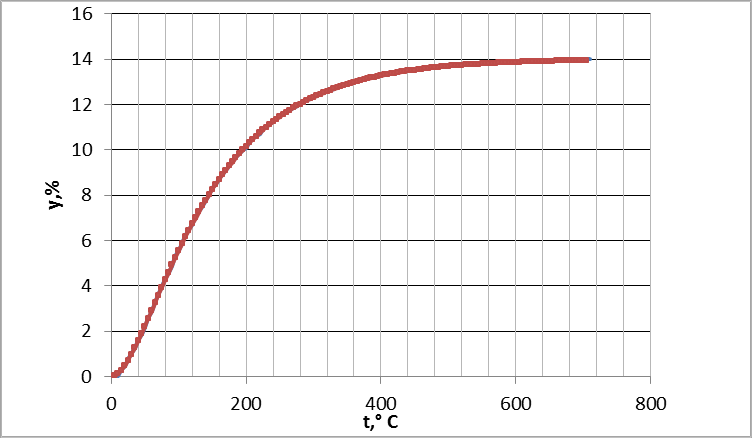
Рисунок 9-Экспериментальная и расчетная кривые разгона
Из рисунка 9 видно, что экспериментальная и теоретическая кривые разгона совпадают
По табл. 2.4. строим экспериментальную кривую разгона (см. рисунок 7, кривая 1). По ней определяем динамические параметры объекта:
 ;
;
 ;
;
 ;
;
 ;
;
где  - постоянная времени;
- постоянная времени;
 - время запаздывания;
- время запаздывания;
 -– скорость разгона;
-– скорость разгона;
 - коэффициент самовыравнивания.
- коэффициент самовыравнивания.
Для построения расчетной кривой разгона необходимо определить параметры  и
и  по экспериментальной кривой разгона. Для этого можно воспользоваться методом Орманса. Последовательность шагов для определения значений и следующая:
по экспериментальной кривой разгона. Для этого можно воспользоваться методом Орманса. Последовательность шагов для определения значений и следующая:
а) Экспериментальная кривая разгона нормируется, т.е. весь диапазон от  до
до  принимается за единицу и по необходимости начало оси времени смещается вправо на величину транспортного запаздывания
принимается за единицу и по необходимости начало оси времени смещается вправо на величину транспортного запаздывания  .
.
б) По нормированной кривой разгона определяется время, соответствующее значению  и обозначается как
и обозначается как  .
.
в) Полученный интервал делится на три части, определяется точка  =
=  . Из точки поднимается перпендикуляр до кривой разгона и определяется величина
. Из точки поднимается перпендикуляр до кривой разгона и определяется величина  .
.
г) Постоянная времени объекта определяется с помощью вспомогательной величины Z*.
 ;
;
 0,3;
0,3;
Z*=0,76;
 ;
;
 с.
с.
Передаточная функция последовательного соединения инерционного звена первого порядка и звена запаздывания и переходная характеристика:
 ;
;

 ;
;
 ;
;
 ;
;
