Определение оптимальных параметров настройки регуляторов по динамическим параметрам объекта
Схема конфигураций алгоритмов для моделирования ОУ представлена на рисунке 7.
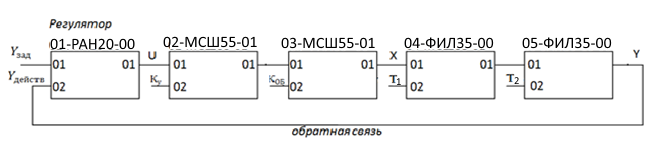
Рисунок 7 – Схема конфигураций алгоритмов для ОУ с самовыравниванием и транспортным запаздыванием
Таблица 3.1. – Состав конфигураций
| № алгоблока | Код алгоритма | Название алгоритма | Модификатор | Масштаб времени |
| РАН | – | |||
| МСШ | – | |||
| МСШ | – | |||
| ФИЛ | – | |||
| ФИЛ | – |
Таблица 3.2. – Конфигурация алгоблоков
| № алгоблока приемника | № входа алгоблока приемника | Инверсия | № алгоблока источника | № выхода алгоблока источника |
| т.п. | ||||
| т.п. | ||||
| т.п. | ||||
| т.п. | ||||
| т.п. |
Таблица 3.3. Настройка алгоблоков
| № алгоблока | Название Алгоритма | № настроечного входа | Название параметра настройки | Численные значения |
| РАН | ХЗ | 50,60 | ||
| МСШ | Км | |||
| МСШ | Коэф.об | 0,7 | ||
| ФИЛ | Пост вр | |||
| ФИЛ | Пост вр | |||
| РАН | Коэф.пропорц | 3,1 | ||
| РАН | Пост. Врем интег | |||
| РАН | Коэфдифферен | |||
| РАН | Уров.огран по макс | |||
| РАН | Уров.огран по мин |
Реализуя ПИД–закон управления, при формировании управляющего сигнала, регулятор учитывает не только величину, но и скорость изменения отклонения от задания. Зависимость междувходной и выходной величинами ПИД–регулятора имеет вид:

или

где:
 – время предварения, параметр настройки дифференциальной части ПИД–регулятора.
– время предварения, параметр настройки дифференциальной части ПИД–регулятора.
Физически  – время, в течение которого угол поворота вала ИМ, под действием дифференцирующей части, удваивается пропорциональной.
– время, в течение которого угол поворота вала ИМ, под действием дифференцирующей части, удваивается пропорциональной.
Данный регулятор имеет три параметра динамической настройки:  ,
,  , . Наличие дифференциальной части в ПИД–регуляторе повышает быстродействие системы и снижает ошибку регулирования в переходных режимах, но никак не сказывается на работе САУ в установившихся режимах.
, . Наличие дифференциальной части в ПИД–регуляторе повышает быстродействие системы и снижает ошибку регулирования в переходных режимах, но никак не сказывается на работе САУ в установившихся режимах.
По методу оптимума по модулю (ОМ) были определены оптимальные значения параметров динамической настройки регуляторов:
 ;
;
 с
с
 ;
;
где  - коэффициент передачи регулятора;
- коэффициент передачи регулятора;
 – время изодрома;
– время изодрома;
 - коэффициент дифференцирования.
- коэффициент дифференцирования.
Построение переходного процесса в контуре автоматического регулирования
После определения значений настроечных параметров автоматического регулятора, необходимо получить непосредственно график переходного процесса. В основном интерес представляет характер процесса, который происходит при возмущающем воздействии в форме скачка. Это более тяжело переносится системой автоматического регулирования, чем плавно изменяющееся воздействие.
Основными требованиями, которым должен удовлетворять оптимальный процесс регулирования являются:
- интенсивное затухание переходного процесса;
- максимальное отклонение регулируемой величины должно быть наименьшим;
- минимальная продолжительность переходного процесса.

Рисунок 9 – Переходный процесс при изменении выходного сигнала
Время достижения первого заданного значения: 
Время регулирования: 
Статическая ошибка регулирования:  ;
;
Перерегулирование:  ;
;
| 56,21 | 59,22 | 60,58 | 60,49 | 60,04 | |||||||
| 54,14 | 56,38 | 59,38 | 60,6 | 60,47 | 60,02 | ||||||
| 54,17 | 56,53 | 59,49 | 60,63 | 60,44 | |||||||
| 54,3 | 56,71 | 59,58 | 60,64 | 60,43 | |||||||
| 54,62 | 56,89 | 59,69 | 60,65 | 60,41 | 59,99 | ||||||
| 54,65 | 57,03 | 59,79 | 60,65 | 60,4 | 59,98 | ||||||
| 54,69 | 57,28 | 59,88 | 60,65 | 60,37 | 59,97 | ||||||
| 54,71 | 57,43 | 59,97 | 60,65 | 60,35 | 59,96 | ||||||
| 54,77 | 57,64 | 60,05 | 60,66 | 60,33 | 59,96 | ||||||
| 54,84 | 57,83 | 60,13 | 60,65 | 60,31 | 59,94 | ||||||
| 54,93 | 57,99 | 60,19 | 60,65 | 60,29 | 59,94 | ||||||
| 55,04 | 58,14 | 60,29 | 60,64 | 60,26 | 59,93 | ||||||
| 55,15 | 58,3 | 60,31 | 60,63 | 60,25 | 59,93 | ||||||
| 55,29 | 58,42 | 60,36 | 60,62 | 60,22 | 59,93 | ||||||
| 55,43 | 58,55 | 60,41 | 60,6 | 60,2 | 59,93 | ||||||
| 55,55 | 58,66 | 60,46 | 60,58 | 60,15 | - | - | |||||
| 55,74 | 58,83 | 60,49 | 60,57 | 60,11 | - | - | |||||
| 55,88 | 58,98 | 60,53 | 60,54 | 60,1 | - | - |
Таблица 3.1.1– Экспериментальные данные
Таблица 3.1.2. – Расчетные данные при воздействии возмущения
| 60,35 | 56,66 | 56,97 | 58,75 | 60,13 | |||||||
| 60,01 | 56,52 | 57,01 | 58,91 | 60,16 | |||||||
| 67,87 | 59,71 | 56,59 | 57,12 | 60,24 | |||||||
| 67,51 | 59,38 | 56,55 | 56,2 | 59,06 | 60,26 | ||||||
| 67,29 | 59,13 | 56,54 | 56,28 | 59,15 | 60,3 | ||||||
| 66,09 | 58,83 | 56,53 | 56,37 | 59,25 | 60,32 | ||||||
| 66,04 | 58,63 | 56,54 | 56,45 | 59,32 | 60,36 | ||||||
| 65,8 | 58,38 | 56,55 | 56,54 | 59,39 | 60,37 | ||||||
| 65,36 | 58,15 | 56,56 | 56,64 | 59,46 | 60,4 | ||||||
| 64,84 | 57,93 | 56,59 | 56,73 | 59,53 | 60,41 | ||||||
| 64,39 | 57,75 | 56,6 | 56,83 | 59,59 | 60,42 | ||||||
| 63,91 | 57,58 | 56,62 | 56,93 | 59,65 | 60,43 | ||||||
| 63,41 | 57,36 | 56,66 | 58,03 | 59,71 | 60,43 | ||||||
| 63,91 | 57,2 | 56,68 | 58,11 | 59,77 | 60,43 | ||||||
| 62,54 | 57,09 | 56,61 | 58,22 | 59,82 | 60,43 | ||||||
| 62,14 | 56,7 | 58,36 | 59,87 | - | - | ||||||
| 61,84 | 56,91 | 56,81 | 58,48 | 59,92 | - | - | |||||
| 61,45 | 56,83 | 56,84 | 58,58 | 59,98 | - | - | |||||
| 61,03 | 56,77 | 56,89 | 58,69 | 60,03 | - | - | |||||
| 60,74 | 56,71 | 56,92 | 58,76 | 60,08 | - | - |

Рисунок 10 – Переходный процесс при воздействии возмущения