Структурное исследование плоского механизма
Вариант № 1.2

|
Рисунок 1.1 – Структурная схема механизма к варианту № 1.2
Исходные данные
| Обозначение | Величина |
| LOA, м | 0,25 |
| LАВ, м | 1,22 |
| LВС, м | 0,32 |
| LАС, м | 1,25 |
| LСD, м | 1,20 |
| LЕD, м | 0,70 |
| LЕF, м | 0,55 |
| La, м | 0,58 |
| Lb, м | 2,32 |
| Lc, м | 0,90 |
| Ld, м | 0,95 |
| m, мм | |
| Угол поворота начального звена (кривошипа ОА) α, град | |
| Число оборотов ведомого вала n вд, об/мин |
Структурная схема механизма в заданном положении показана на рисунке 1.2.

Рисунок 1.2 – Структурная схема механизма в заданном положении
Анализ кинематических пар представлен в таблице 1.1.
Таблица 1.1 – Анализ кинематических пар механизма
| Номера пар п/п | Звенья, образующие пару | Относительное движение звеньев, допускаемое парой | Класс пары | Высшая или низшая пара | Наименование пары |
| Ι | 0-1 | Вращательное | II | Н | ВП |
| ΙΙ | 1-2 | Вращательное | II | Н | ВП |
| ΙΙΙ | 2-3 | Вращательное | II | Н | ВП |
| IV | 3-4 | Поступательное | II | Н | ПП |
| V | 2-5 | Вращательное | II | Н | ВП |
| VI | 5-6 | Вращательное | II | Н | ВП |
| VII | 6-7 | Вращательное | II | Н | ВП |
| VIII | 6-8 | Вращательное | II | Н | ВП |
| IX | 8-9 | Поступательное | II | Н | ПП |
| X | 9-10 | Вращательное | II | Н | ВП |
Анализ звеньев механизма представлен в таблице 1.2.
Таблица 1.2 – Анализ звеньев механизма
| Номера звеньев п/п | В какие пары входит звено | Абсолютное движение звена (относительно стойки) |
| I | Неподвижно | |
| I, II | Вращательное | |
| II, III, V | Вращательно-поступательное | |
| III, IV | Поступательное | |
| IV | Неподвижно | |
| V,VI | Вращательное | |
| VI, VII, VIII | Вращательное | |
| VII | Неподвижно | |
| VIII, IX | Вращательно-поступательное | |
| IX, X | Вращательное | |
| X | Неподвижно |
Число степеней подвижности механизма W по структурной формуле Чебышева:
 (1.1)
(1.1)
где:
n – число звеньев механизма (включая стойку);
Р 2 – число пар ΙΙ класс;
Р 1 – число пар Ι класса.
Разделим механизм на структурные группы Ассура и первичный механизм. По методике Ассура любой механизм (плоский или пространственный) можно разделить на первичный механизм и на отдельные однотипные части (структурные группы), состоящие из определенного числа звеньев и кинематических пар. Для заданной структурной схемы механизма структурные группы Ассура показаны на рисунке 1.3.
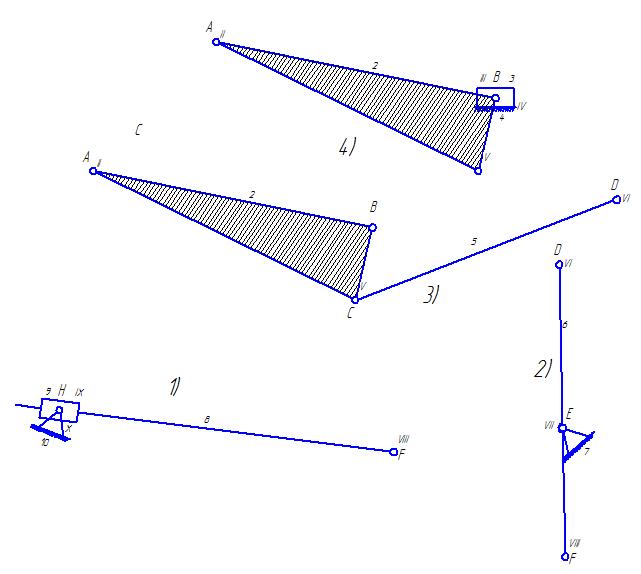
Рисунок 1.3 – Структурные группы Ассура
В таблице 1.3 представлено разделение механизма на структурные группы Ассура.
Таблица 1.3 – Структурные группы Ассура
| № группы в порядке ее отделения от механизма | Звенья, образующие группу | Внешние пары | Внутренние пары | Вид группы |
| 8,9 | X, VIII | IX | 3 (ВПВ) | |
| 6,7 | VIII, VI | VII | 1 (ВВВ) | |
| 2,5 | VI, II | V | 1 (ВВВ) | |
| 2,3 | II, IV | III | 2 (ВВП) |
Кинематический анализ плоского механизма
План положения механизма
Построение заданного положения механизма выполним в масштабе ks=0,005 м/мм, тогда длины отрезков:
 мм (2.1)
мм (2.1)
 мм (2.2)
мм (2.2)
 мм (2.3)
мм (2.3)
 мм (2.4)
мм (2.4)
 мм (2.5)
мм (2.5)
 мм (2.6)
мм (2.6)
 мм (2.7)
мм (2.7)
 мм (2.8)
мм (2.8)
 мм (2.9)
мм (2.9)
 мм (2.10)
мм (2.10)
 мм (2.11)
мм (2.11)
План положения механизма в соответствии с заданием показан на чертеже.
Планы скоростей и ускорений
Направления скоростей и ускорений точек звеньев механизма
В общем случае криволинейного движения вектор скорости  точки А (рис 2.1, а), как и вектор тангенциальной составляющей
точки А (рис 2.1, а), как и вектор тангенциальной составляющей  полного ускорения, направлены по касательной к траектории движения, а вектор нормальной составляющей
полного ускорения, направлены по касательной к траектории движения, а вектор нормальной составляющей  полного ускорения – вдоль нормали (отсюда название составляющей) к касательной по направлению к центру кривизны траектории О. В частном случае, когда траекторией является окружность, (рис. 2.1, б), то векторы
полного ускорения – вдоль нормали (отсюда название составляющей) к касательной по направлению к центру кривизны траектории О. В частном случае, когда траекторией является окружность, (рис. 2.1, б), то векторы  и
и  перпендикулярны радиусу ОА, а вектор
перпендикулярны радиусу ОА, а вектор  направлен параллельно ОА от точки А к центру окружности О. В том случае, если ОА – звено механизма и известны его угловая скорость ωОА и угловое ускорение εОА, то:
направлен параллельно ОА от точки А к центру окружности О. В том случае, если ОА – звено механизма и известны его угловая скорость ωОА и угловое ускорение εОА, то:
 (2.12)
(2.12)
 (2.13)
(2.13)
 (2.14)
(2.14)
Вектор  направлен в сторону вращения, т.е. совпадает с направлением угловой скорости ωОА. Направление вектора совпадает с направлением углового ускорения εОА.
направлен в сторону вращения, т.е. совпадает с направлением угловой скорости ωОА. Направление вектора совпадает с направлением углового ускорения εОА.
Если для любого звена построены план скоростей и план ускорений, то можно определить направления и величины угловой скорости и углового ускорения. Пусть для звена АВ (рисунок 2.2, а) построены план скоростей (рисунок 2.2, б) и план ускорений (рисунок 2.2, в) точек А и В.

Рисунок 2.1 – Направления скорости и ускорения криволинейного движения

Рисунок 2.2 – Определение угловой скорости и углового ускорения звена АВ
Перенесем в точку В звена вектор  относительной скорости точки В, снятый с плана скоростей (
относительной скорости точки В, снятый с плана скоростей ( = kv * аb) и вектор тангенциальной составляющей полного ускорения, снятый с плана ускорений (
= kv * аb) и вектор тангенциальной составляющей полного ускорения, снятый с плана ускорений ( = kw nb '). Направления векторов
= kw nb '). Направления векторов  и
и  определят соответственно направления угловой скорости ωАВ и углового ускорения εАB.
определят соответственно направления угловой скорости ωАВ и углового ускорения εАB.
 (2.15)
(2.15)
 (2.16)
(2.16)