Лабораторная работа №1
Цель работы: научиться рассчитывать комбинированные системы автоматического управления.
Постановка задачи: Удовлетворительное качество регулирования в простейшей одноконтурной системе с использованием стандартных законов регулирования можно обеспечить лишь при благоприятных динамических характеристиках объекта. Однако большинству промышленных объектов химической технологии свойственны значительное чистое запаздывание и большие постоянные времени. В таких случаях даже при оптимальных настройках регуляторов одноконтурные АСР характеризуются большими динамическими ошибками, низкой частотой регулирования и длительными переходными процессами.
Необходимо:
1. Перейти от одноконтурной АСР к комбинированной системе с дополнительным корректирующим импульсом;
2. Провести расчет настроек регулятора;
3. Получить передаточную функцию динамического компенсатора.
Теоретические сведения
Комбинированные системы регулирования применяют при автоматизации объектов, подверженных действию существенных контролируемых возмущений.
Существует два способа построения комбинированных АСР (рис. 1а, б).
| Wр |
| Wдк |
| Wов |
| Wор |
| f |
| y |
| y0 |
а)
| Wр |
| Wдк |
| Wов |
| Wор |
| f |
| y |
| y0 |
б)
Рис. 1. Структурная схема комбинированной АСР
а – при подключении выхода компенсатора на вход объекта;
б – при подключении компенсатора на вход регулятора.
Обе схемы регулирования обладают общими особенностями: наличием двух каналов воздействия на выходную координату объекта и использованием двух контуров регулирования – замкнутого (через регулятор) и разомкнутого (через компенсатор). Отличие состоит лишь в том, что во втором случае корректирующий импульс от компенсатора поступает не на вход объекта, а на вход регулятора.
Основой расчета подобных систем является принцип инвариантности: отклонение выходной координаты системы от заданного значения должно быть тождественно равным нулю при любых задающих или возмущающих воздействиях.
Выведем условие инвариантности для комбинированной АСР. Для случая, когда сигнал от компенсатора подается на вход объекта (рис. 1а), структурная схема комбинированной АСР преобразуется к последовательному соединению разомкнутой системы и замкнутого контура (рис. 2а), передаточные функции которых соответственно равны:
 ,
,
 .
.
При этом условие инвариантности записывается в виде:
 .
.
Если при этом  и
и  , должно выполняться условие:
, должно выполняться условие:
 ,
,
откуда
 . (1)
. (1)
Аналогично выводится передаточная функция динамического компенсатора для случая, когда сигнал от компенсатора подается на вход регулятора (рис. 2б):
 . (2)
. (2)
| Wов |
| Wдк |
| Wор |
| Wор |
| Wр |
а)
| Wов |
| Wдк |
| Wор |
| Wор |
| Wр |
| Wр |
б)
Рис. 2. Преобразованная структурная схема комбинированной АСР
а – при подключении выхода компенсатора на вход регулятора;
б – при подключении выхода регулятора на выход объекта.
Одной из основных проблем, возникающих при построении комбинированных систем регулирования, является реализуемость компенсатора.
«Идеальный» компенсатор физически нереализуем в двух случаях.
1. Если время чистого запаздывания по каналу регулирования больше, чем по каналу возмущения:  .
.
В этом случае идеальный компенсатор должен содержать звено упреждения.
2. Если в передаточной функции компенсатора степень полинома в числителе больше, чем степень полинома в знаменателе. В этом случае компенсатор должен содержать идеальные дифференцирующие звенья.
Ход работы
1. Динамические характеристики объекта по каналам возмущения и регулирования описываются передаточными функциями:
8: 
В комбинированной АСР используется П-регулятор с передаточной функцией  .
.
Настройки регулятора определяются по системе Циглера-Никольса из системы уравнений:
 .
.


Строим графики АЧХ и ФЧХ. На ФЧХ при φ=-π ищем критическую частоту ωкр.

На АЧХ при ωкр ищем Аоб.


Это критическая настройка регулятора, при которой замкнутая система регулирования будет находиться на границе устойчивости. Рабочую частоту ωр принимаем приближенно равной критической ωкр=1,58, а оптимальную настройку регулятора равной  1,89=0,945.
1,89=0,945.
2. Передаточную функцию компенсатора определим по формуле (1) в соответствии с выбранной схемой комбинированной АСР на рис. 1а.
Передаточная функция компенсатора будет:
 .
.
Так как такой компенсатор не содержит звеньев упреждения, и степень полинома числителя не превосходит степени полинома знаменателя, идеальный компенсатор физически реализуем.
3. Для выбора реального компенсатора построим частотные характеристики идеального компенсатора в диапазоне частот [0,ωр]:
Получим:
 ;
;
 .
.
Определяем значения АЧХ и ФЧХ для ω = 0 и ω = ωр.


| 0.05 |
| 0,3 |
| 0,5 |
| 0,85 |
| A |
| w |
| ( |
| ) |
| A |
| ( |
| ) |
| A |
| 1,58) |
| ( |
| f |
| w |
| ( |
| ) |
| f |
| ( |
| ) |
| , |
| f |
| 1,58) |
| ( |
| , |
По виду полученного участка годографа АФХ определяем, какое звено можно использовать в качестве реального динамического компенсатора, после чего определяем параметры этого звена.
Так как вектор АФХ идеального компенсатора находится в четвертом квадранте, в качестве реального компенсатора выберем апериодическое звено 1 порядка:

|

|
Система уравнений для определения настроек реального компенсатора, обеспечивающего инвариантность при w = 0 и w = wр, имеет вид:




4. В системе MatLab строим переходные процессы для одноконтурной АСР с П-регулятором. После чего добавляем к ней разомкнутый контур управления с динамическим компенсатором. Для этого в зависимости от задания реализуем первую схему, представленную на рис.2. При этом используются следующие команды:
Wdk = tf (0.49, [0.11])
Wor = tf (1, [1 1])
Wor.inputdelay = 1.35
Wov = tf (0.5, [1.051])
Wov.inputdelay = 1.44
Wr= tf (0.945, [1])
Wdkor=series(Wdk,Wor)
W1=parallel(Wov,Wdkor)
Wror=series(Wr,Wor)
W2=feedback(1,Wror)
WI=series(W1,W2)
WII=series(Wov,W2)
step(WI,WII)
5. Полученные графики приведены на рис.3.На рис. 3а представлен график переходного процесса в замкнутой системе без динамического компенсатора, на рис. 3б – с динамическим компенсатором и на рис. 3в – показаны переходные процессы для обоих случаев.
а) б) 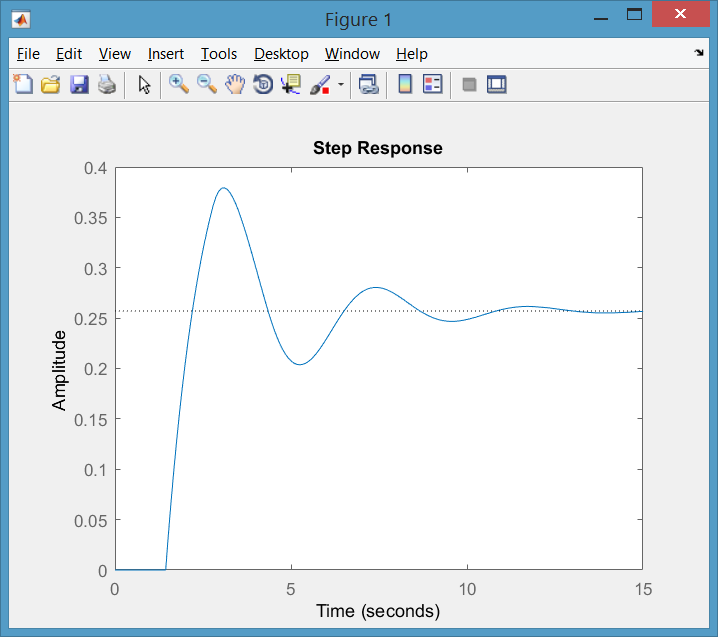


в)
Рис. 3. Переходные процессы в замкнутой системе
а – без динамического компенсатора;
б – с динамическим компенсатором;
в – для обоих случаев.
Контрольные вопросы:
1. В чем особенность комбинированных систем управления?
Главная особенность комбинированных систем управления состоит в том, что возмущающее воздействие компенсируется до входа в объект регулирования.
2. Приведите пример комбинированной АСР для типового объекта химической технологии.
Например, система регулирования уровня жидкости с компенсацией изменений нагрузки (с коррекцией по нагрузке).
3. В чем заключается принцип инвариантности?
Принцип инвариантности заключается в том, что отклонение выходной координаты системы от заданного значения должно быть тождественно равным нулю при любых задающих или возмущающих воздействиях.
4. В каком случае «идеальный» компенсатор физически нереализуем?
«Идеальный» компенсатор физически нереализуем в двух случаях.
а. Если время чистого запаздывания по каналу регулирования больше, чем по каналу возмущения:.
В этом случае идеальный компенсатор должен содержать звено упреждения.
б. Если в передаточной функции компенсатора степень полинома в числителе больше, чем степень полинома в знаменателе. В этом случае компенсатор должен содержать идеальные дифференцирующие звенья.
5. Сделайте вывод передаточной функции динамического компенсатора исходя из условия инвариантности.
Выведем условие инвариантности для комбинированной АСР. Для случая, когда сигнал от компенсатора подается на вход объекта (рис. 1а), структурная схема комбинированной АСР преобразуется к последовательному соединению разомкнутой системы и замкнутого контура (рис. 2а), передаточные функции которых соответственно равны:
,
.
При этом условие инвариантности записывается в виде:
.
Если при этом и , должно выполняться условие:
,
откуда
.
Вывод: научились рассчитывать комбинированные системы автоматического управления.