 Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат Rп, а для регулирования частоты вращения параллельно обмотке возбуждения может быть включен регулировочный реостат Rрв. Характерной особенностью этого электродвигателя является то, что его ток возбуждения Iв равен или пропорционален (при включении реостата Rрв) току обмотки якоря Iя, поэтому магнитный поток Ф зависит от нагрузки двигателя:
Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат Rп, а для регулирования частоты вращения параллельно обмотке возбуждения может быть включен регулировочный реостат Rрв. Характерной особенностью этого электродвигателя является то, что его ток возбуждения Iв равен или пропорционален (при включении реостата Rрв) току обмотки якоря Iя, поэтому магнитный поток Ф зависит от нагрузки двигателя:
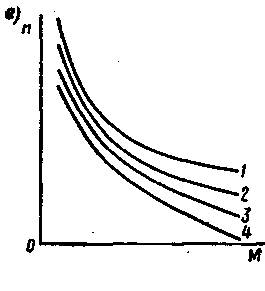 Механическая характеристика, т. е. зависимость n от М может быть построена на основании зависимостей n и М от Iя.
Механическая характеристика, т. е. зависимость n от М может быть построена на основании зависимостей n и М от Iя.
Кроме естественной характеристики 1, можно путем включения в цепь обмотки якоря реостата с сопротивлением Rп получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям Rп1, Rп2 и Rп3; при этом чем больше Rп, тем ниже располагается характеристика. Механическая характеристика рассматриваемого двигателя мягкая и имеет гиперболический характер. При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.). Обычно минимально допустимая нагрузка для двигателей большой и средней мощности составляет (0,2-0,25) Iном.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.). Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастаний тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением; поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Если принять, например, что кратковременный пусковой ток может в 2 раза превышать номинальный рабочий ток машины, и пренебречь влиянием насыщения, реакцией якоря и падением напряжения в цепи его обмотки, то в двигателе с последовательным возбуждением пусковой момент будет в 4 раза больше номинального (в 2 раза увеличиваются и ток, и магнитный поток), а в двигателях с независимым и параллельным возбуждением — только в 2 раза больше.
 Электродвигатель со смешанным возбуждением
Электродвигатель со смешанным возбуждением
В этом электродвигателе магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной (или независимой) и последовательной.
Механическая характеристика электродвигателя со смешанным возбуждением - кривая 3. Для сравнения показаны характеристики двигателей с параллельным (прямая 1, жесткая х-ка) и последовательным (кривая 2, мягкая х-ка) возбуждением.


Достоинством двигателя со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе. В этом режиме частота вращения его якоря имеет ограниченное значение (двигатель не идет вразнос).