МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ
(ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)
Кафедра управления и информатики
Методические указания по выполнению лабораторной работы по теме
«Исследование влияния параметров настройки
ПИД-регулятора на качество работы
Импульсной системы автоматического управления»
Москва
Задание на проведение лабораторной работы по теме
«Исследование влияния параметров настройки ПИД-регулятора на качество работы импульсной системы автоматического управления».
1. Для объекта регулирования, параметры которого задаются вариантом задания, провести настройку параметров ПИД-регулятора при следующих заданных показателях качества работы непрерывной САУ:
- кинетическая ошибка по управляющему воздействию dкин<0.05;
- величине перерегулирования сигнала на выходе САУ s<10%;
- время регулирования t р.
1.1. Исследовать и построить зависимости времени регулирования и перерегулирования от постоянной времени дифференцирующего звена регулятора (Т д) при различных значениях коэффициента усиления пропорциональной части регулятора (K р). Анализируя полученные в зависимости, определить и зафиксировать значение постоянной времени дифференцирующего звена регулятора (Т д) как оптимальное (величина перерегулирования s<10%, время регулирования t р минимальное).
Повторить исследования для различных коэффициентов усиления интегральной части регулятора (Т и). Определить и зафиксировать значение постоянной времени дифференцирующего звена регулятора (Т и) как оптимальное.
1.2. Анализируя полученные в п.1.1 зависимости, определить оптимальные значения параметров регулятора. Настроить регулятор по найденным параметрам.
2. Построение области устойчивости непрерывной системы с ПИД-регулятором в зависимости от постоянной времени дифференцирующего звена регулятора (Т д).
Последовательно изменяя постоянную времени Т д и анализируя переходной процесс, определить граничный коэффициент усиления системы K гр, коэффициент усиления системы. Построить зависимость K гр(Т д).
Повторить исследования для различных коэффициентов усиления интегральной части регулятора (Т и).
3. Для объекта регулирования провести исследования влияния
параметров ПИД-регулятора на качество работы импульсной САУ.
Исследования проводятся аналогично непрерывной САУ (см. п. 1.1, 1.2) для различных значений периода квантования Т 0.
4. Построить область устойчивости импульсной системы с ПИД-
регулятором в зависимости от
- постоянной времени дифференцирующего звена регулятора (Т д),
- коэффициентов усиления интегрирующей части регулятора (Т и)
аналогично с п. 2.1.
Провести исследования для различных значений периода квантования Т 0.
5. Проанализировать результаты исследований непрерывной и импульсной САУ. Сделать выводы о влиянии периода квантования на параметры настройки ПИД-регулятора и величину K гр.
Методические указания по выполнению работы.
Запуск программы.
Для запуска программы в командном окне необходимо ввести ее название – PID_regul – и нажать клавишу «Enter».
 После запуска этой программы на экране появится окно-заставка (рис. 1.)
После запуска этой программы на экране появится окно-заставка (рис. 1.)
Рис.1. Окно-заставка.
После нажатия на кнопку «Войти» откроется главное меню программы, которое содержит следующие пункты: «Система» «Исследование непрерывной системы», «Исследование импульсной системы», «Помощь».
2. Выбор варианта объекта управления. Задание типа исследуемой системы.
Пункт «Система» содержит подпункты: «Выбрать вариант», «Выбрать тип системы», «Выход».
Для начала работы следует задать номер варианта (рис. 2) и выбрать тип исследуемой системы (непрерывная или импульсная) (рис. 3).

Рис. 2. Выбор варианта.
Рис. 3. Выбор типа системы.
При этом на экране появится структурная схема системы, соответствующая варианту задания, и ее параметры (Рис. 4).

Рис. 4. Структурная схема системы.
После этого станет доступным пункт меню «Исследование непрерывной системы» или «Исследование импульсной системы» в соответствии с выбранным типом системы, а также откроется модель системы в Simulink.
Исследование влияния параметров ПИД-регулятора на качество работы САУ.
Выбор коэффициентов настройки регулятора рекомендуется проводить на основании построения номограмм, характеризующих зависимости показателей качества при варьировании одного из коэффициентов настройки и фиксированных значениях других коэффициентов. Для исходной постановки задачи, когда требуется обеспечить заданные ограничения на величину перерегулирования и, одновременно, минимизировать длительность переходного процесса, номограммы зависимости σ(Т д) и σ(Т и) при различных коэффициентах Kр позволяют оценить допустимый интервал изменения варьируемого параметра, на котором затем определяется точка, обеспечивающая минимальное значение параметра t p.
Для построения номограмм в пункте меню «Исследование непрерывной системы», следует выбрать тип номограммы, например, «Величины перегулирования от постоянной времени дифференцирующей части регулятора Т д ». При этом откроется форма для проведения исследований (рис. 5).

Рис. 5. Форма для построения номограммы для непрерывной системы
Для построения номограммы следует задать коэффициент усиления пропорциональной части регулятора и, изменяя значение постоянной времени дифференцирующего звена, построить зависимость s (Т д ).
Изменив параметр Т д необходимо нажать кнопку «Ввод», при этом построится новый переходной процесс, и рассчитаются новые значения перерегулирования и времени регулирования. Теперь следует нажать кнопку «Добавить». При этом на графике появится точка, соответствующая заданному значению. Далее, изменяя значение постоянной времени дифференцирующего звена, нужно построить зависимость s (Т д ) (рис. 6). Если возникнет необходимость увеличить какую-либо область графика, то можно выделить эту область при помощи мыши, удерживая нажатой левую клавишу. Чтобы вернуться к нормальному масштабу, следует нажать кнопку «Автомасштаб».

Рис. 6. Построение зависимости  (Т д ).
(Т д ).
Такие зависимости следует построить для разных коэффициентов усиления пропорциональной части регулятора. Чтобы изменить коэффициент K р, необходимо нажать на кнопку «Изменить K р » и в появившемся окне (рис. 7) вести нужное значение.

Рис. 7. Окно для ввода коэффициента K р.
Настройка регулятора.
Для настройки регулятора в пункте меню «Исследование непрерывной системы», следует выбрать подпункт «Настройка регулятора». При этом откроется форма, в которой можно задать параметры регулятора и построить переходной процесс (Рис.8).
 Рис. 8. Настройка регулятора.
Рис. 8. Настройка регулятора.
5. Построение области устойчивости.
Для построения области устойчивости непрерывной системы в пункте меню «Исследование непрерывной системы», следует выбрать подпункт «Построение границы устойчивости» и выбрать тип зависимости. Например «Зависимость граничного коэффициента усиления K грот Т д». При этом откроется форма для построения границы устойчивости (Рис. 9).

Рис. 9. Форма для построения границы устойчивости для непрерывной системы.
В этой форме необходимо задать следующие параметры: коэффициент усиления пропорциональной части и постоянную времени дифференциальной части ПИД-регулятора.
Сначала в редакционном окне «Постоянная времени Т д » задается значение постоянной времени дифференцирующего звена регулятора, потом в редакционном окне «Коэффициент усиления регулятора K р » задается значение коэффициента усиления пропорциональной части регулятора. Для построения переходного процесса при заданных параметрах необходимо нажать кнопку «Ввод» (рис. 10).
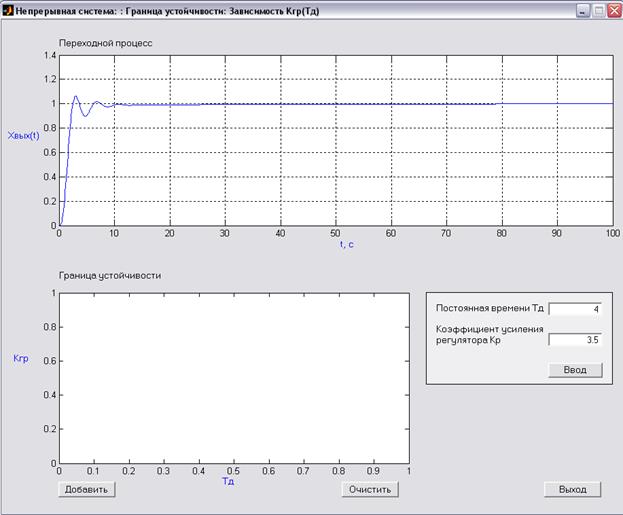
Рис. 10. Построение переходного процесса.
Для построения области устойчивости необходимо подобрать такой коэффициент усиления, чтобы система находилась на границе устойчивости. Это достигается изменением коэффициента усиления системы до тех пор, пока процесс в системе не станет колебательным. Когда же предельное значение коэффициента усиления будет найдено, необходимо нажать кнопку «Добавить», после чего на нижнем графике отобразится точка, соответствующая найденному значению. После занесения найденного предельного значения коэффициента усиления на график области устойчивости необходимо изменить значение постоянной времени дифференцирующего звена регулятора и повторить процедуру поиска предельного коэффициента усиления для новой постоянной времени. В результате этих действий будет построена область устойчивости для исследуемой системы (рис. 11).

Рис. 11. Область устойчивости непрерывной системы.
Исследование влияния параметров ПИД-регулятора на качество работы импульсной САУ проводятся аналогично.
Сообщения об ошибках.
При выполнении лабораторной работы с применением разработанного программного обеспечения могут возникать некоторые сообщения об ошибках.
 В случае, когда пользователь неверно задал или вообще не задал номер варианта, то при попытке продолжить работу появится сообщение о необходимости проверить номер заданного варианта (рис. 12).
В случае, когда пользователь неверно задал или вообще не задал номер варианта, то при попытке продолжить работу появится сообщение о необходимости проверить номер заданного варианта (рис. 12).
Рис. 12.Сообщение о неверно заданном варианте.
При проведении исследований  систем следует следить за тем., чтобы все необходимые параметры для расчета были заданы. В противном случае появится сообщение о том, что не все параметры заданы (рис. 13).
систем следует следить за тем., чтобы все необходимые параметры для расчета были заданы. В противном случае появится сообщение о том, что не все параметры заданы (рис. 13).
Рис. 13.Сообщение о недостаточности
заданных параметров.
При построении номограмм может возникнуть ситуация, когда переходной процесс расходится или время его регулирования значительно больше времени регулирования, которое достигается при оптимальной настройке регулятора. В этом случае появится сообщение о расходящемся процессе (рис. 14).

Рис. 14. Сообщение о расходящемся переходном процессе.