Система EPIC (Electronically Programmed Injection Control) электронного регулирования топливоподачи дизелей разработана фирмой Lucas в конце 1970-х годов. В настоящее время система EPIC устанавливается на дизели автомобилей Citroen, Mercedes-Benz, Peugeot, Ford и ряд других.
Система EPIC применяется как в дизелях с разделёнными камерами сгорания, давление впрыскивания топлива в которых может достигать 350 кгс/см2, так и в дизелях с непосредственным впрыскиванием топлива с давлением до 1000 кгс/см2.
Основой системы является топливный насос Lucas типа DPC с внутренним кулачковым механизмом (рис.5.62).
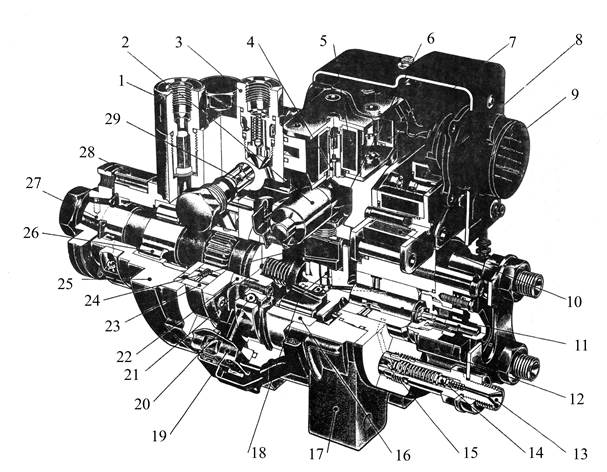
Рис 5.62. Общий вид ТНВД ЕPIC-80 фирмы Лукас:
1 – штуцер подвода топлива; 2 – сервопоршень регулирования угла опережения впрыскивания (УОВ); 3 – штуцер слива; 4 – седло шарикового клапана; 5 – электромагнит УОВ; 6 – болт-поводок кулачковой шайбы; 7 – электромагнит дренажа системы управления (СУ) ротором; 8 – электромагнит подачи СУ ротором; 9 – разъем; 10 – электромагнит прерывания топливоподачи (ТП); 11 – ротор; 12 – датчик осевого положения ротора; 13 – нагнетательный штуцер; 14 – демпфирующий клапан; 15 – нагнетательный клапан; 16 – кулачковая шайба; 17 – средняя опора; 18 – плунжеры; 19 – датчик углового положения вала; 20 – внешний шариковый подшипник; 21 – кольцо измерения частоты вала; 22 – внутреннее кольцо сферической опоры; 23 – роторно-лопастной топливоподкачивающий насос (ТПН); 24 – ролик кулачковой шайбы с толкателем; 25 – корпус привода; 26 – передний подшипник; 27 – приводной вал; 28 – адаптер регулировки УОВ; 29 – регулятор давления подкачки
Корпус ТНВД закрепляется на двигателе с помощью средних опор 17 и переднего адаптера 28, допускающих поворот ТНВД вокруг оси для предварительной установки УОВ. Приводной вал 27 на подшипниках 26 и 20 приводит во вращение роторно-лопастной топливоподкачивающий насос с четырьмя подпружиненными лопастями. Они обеспечивают при пусковой частоте коленчатого вала 180 об/мин давление подкачки 3 кгс/см2, а свыше 500 об/мин – 8...9 кгс/см2. Вал несет перфорированное кольцо 21 для измерения датчиком 19 положения вала. Вал заканчивайся клиновыми захватами, приводящими во вращение сносно расположенный по длине насоса ротор 11. Ротор снабжен прецизионными отверстиями под два или четыре плунжера 18 и пазами под роликовые толкатели 24 (рис. 5.63).
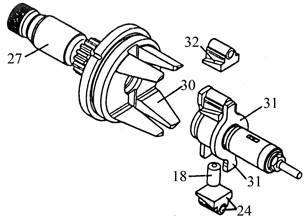
Рис. 5.63. Механизм привода и регулирования цикловой подачи (позиции соответствуют рис. 5.62):
18 – плунжеры; 24 – ролик кулачковой шайбы с толкателем; 27 – приводной вал; 30 – клиновые захваты; 31 – выступы; 32 – скос на толкателе
Их ролики толкателей обкатывают внутренний профиль кулачковой шайбы 16, которая заставляет их сходиться для нагнетания топлива. Ротор снабжен тремя продольными разгружающими пазами. Кроме того, ротор имеет продольный паз-распределитель (на рис. 5.62 показан пунктиром). При схождении плунжеров распределитель сообщается с одним из нагнетательных клапанов 15, а при расхождении – с наполнительными каналами втулки ротора. В верхней части ТНВД располагаются электромагниты управления 5, 7, 10 и механизм 2 поворота кулачковой шайбы для изменения УОВ.
Высокое давление в ТНВД EPIC создаётся с помощью четырёх (двух) радиально расположенных плунжеров, которые вращаются вместе с роликами и толкателями (башмаками) внутри кулачковой обоймы. Регулирование подачи осуществляется посредством радиального смещения роликов по наклонной опорной поверхности толкателей при осевом перемещении ротора.
Ротор 9, в держателе которого установлены плунжеры высокого давления 2, находится под усилием пружины 10, которая в стационарном положении держит ротор на упоре, когда ход плунжеров имеет максимальную величину и обеспечивает максимальную подачу топлива (рис. 5.64,А).
При работе двигателя камера давления на конце ротора заполняется топливом, под давлением которого ротор перемещается, преодолевая сопротивление пружины, в сторону уменьшения подачи вплоть до достижения минимальной подачи (рис. 5.64, В).
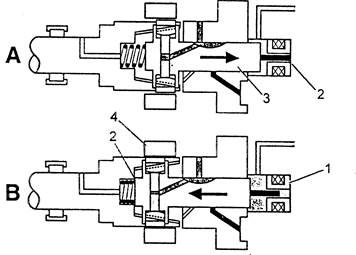
Рис. 5.64. Положение ротора при максимальной и минимальной подачах топлива:
А – максимальная подача топлива; В – минимальная подача топлива; 1 – индуктивный датчик; 2 – упор; 3 – ротор; 4 – кольцо с внутренним кулачковым профилем
Механизм управления осевым положением ротора (т.е. цикловой подачи) показан на рис. 5.70. Топливо через входной штуцер поступает к ТПН, давление подкачки стабилизируется регулятором 29, и поступает к шариковому клапану электромагнита 8 подачи СУ положением ротора. При его открытии топливо поступает в торцевую полость ротора 37, повышая давление в ней. Сброс давления осуществляется шариковым клапаном электромагнитного клапана 7, топливо при этом сливается в корпус насоса и топливный бак через жиклер стабилизации положения ротора.
Открытые электромагнитные клапаны 7 и 8 на короткое время попеременно закрываются по командам блока управления, обеспечивая необходимое давление у торца ротора. Во время впрыскивания топлива оба регулирующих клапана закрыты.
Относительным временем открытия того или и иного электромагнитного клапана (скважность включения) регулируется электронным блоком управления, получающим входные частотные сигналы от датчика Холла 19, расположенного в ТНВД (рис. 5.62).
Положение ротора определяет величину цикловой подачи, соответствующей также температуре топлива. Сигнал осевого положения ротора передается индуктивным датчиком 12 (рис. 5.65), расположенным в торцевой полости ротора, в электронный блок управления, что обеспечивает межцикловую стабильность и точность заданной (равномерной или индивидуальной) подачи по цилиндрам. При нормально отрегулированных форсунках неравномерность подачи по цилиндрам составляет 0,5 мм3 в интервале подач 10...50 мм.
На холостом ходу система EPIC обеспечивает индивидуальную подачу по цилиндрам, поэтому за один оборот вала ТНВД СУ подачей и положение ротора успевает перенастроиться для каждого цилиндра. Время перемещения ротора от нулевой до максимальной подачи топлива составляет приблизительно 0,1 с, растягиваясь на несколько циклов впрыскивания в зависимости от частоты вращения коленчатого вала. Перемещение ротора осуществляется только в периоды между впрысками.
Датчик положения коленчатого вала с четырьмя метками (для 4 - цилиндрового дизеля) позволяет оперативно диагностировать вырабатываемую каждым цилиндром мощность и корректировать цикловую подачу, добиваясь баланса мощности по цилиндрам.
Для снижения пульсаций давления в канале дренажа имеется жиклер 36. Заданное давление и противодействие возвратной пружины между приводным валом и ротором, обусловливает его устойчивое положение.
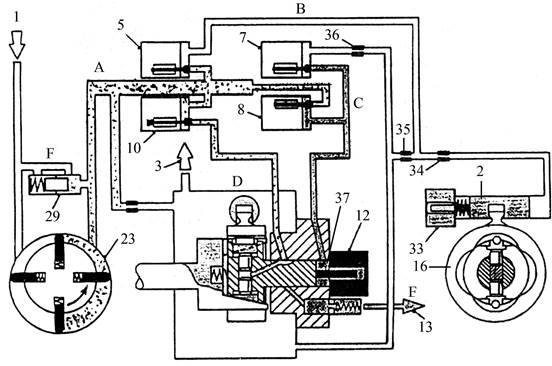
Рис. 5.65. Гидравлическая схема управления подачей топлива (позиции соответствуют рис. 5.62):
А – подкачка топлива; В – управление УОВ; С – управление положением ротора; D – низкое давление в ТНВД; E – нагнетание топлива; F – вход топлива в ТНВД; 1 – штуцер подвода топлива; 3 – штуцер слива; 5 – электромагнит УОВ; 7 – электромагнит дренажа системы управления (СУ) ротором; 8 – электромагнит подачи СУ ротором; 10 – электромагнит прерывания ТП; 12 – датчик осевого положения ротора; 13 – нагнетательный штуцер; 23 – роторно-лопастной ТПН; 29 – регулятор давления подкачки; 33 – датчик положения сервопоршня; 34 – жиклер стабилизации УОВ; 35 – жиклер стабилизации сервопоршня от нагнетания топлива; 36 – жиклер стабилизации положения ротора; 37 – торцевая полость ротора
В рабочей области перемещений ротора 2,5 мм (при геометрическом 4 мм) обеспечивается строгая линейность между перемещением и цикловой подачей. Крайнее внутреннее положение ротора соответствует минимальной подаче, а полностью ее отключает электромагнит 10, перекрывая подвод топлива к плунжерам. Он используется для остановки дизеля и включен в противоугонную систему.
Изменение УОВ достигается разворотом кулачковой шайбы 16 с помощью сервопоршня 2. Его положение обусловлено балансом момента с шайбы, усилия пружины и разницы давлений топлива на сервопоршень.
Электронный блок управления распознает положение роликов внутри кулачковой шайбы 16 по отношению к ВМТ по сигналу от датчика частоты вращения коленчатого вала и от датчика 33 положения сервопоршня. Датчик положения сервопоршня посылает в электронный блок управления сигнал, который определяет точный угол опережения впрыскивания по отношению к ВМТ такта сжатия.
Давление управления УОВ (В) определяется балансом расходов топлива в гидроцилиндр: оно постоянно сбрасывается на слив в корпус через жиклер 34, но и периодически поступает через электромагнитный клапан 5. Таким образом, уровень давления в гидроцилиндре и, следовательно, УОВ обусловливается относительным временем открывания электромагнитного клапана 5, определяемого блоком управления.