Билет №1
 1.Адаптивная с-ма ТИ с рацион постр телеметрич кадра. Данное устр позволяет передать код параметра и коды адресов тех датчиков, сигналы которых в данный момент равны между собой, с погрешностью, определяемой квантованием сигнала по уровню, в одном телеметрическом кадре. Стр схема КП с-мы рис. 1.49. Устр работает след обр. По сигналу с БУ входн пар-ры поступают через коммутатор на АЦП, где происходит их преобразов в код. Код входного пар-ра сравнив с кодом этого же пар-ра в предыд точке отсчета, записанного в ЗУ. Если абсолютное знач разности данного и предыд отсчетов меньше шага квантования, то СС закрыв ключ и не пропускает текущую кодовую комбин на вход буферной памяти (БП). Если эта разность оказыв > шага квантования, то текущая кодовая комбин передается в БП. Т.о. осуществл адаптивная дискретиз входных сигналов и все неизбыточные отсчеты записыв в БП. Далее, с одного из вых БУ поступает сигнал на анализатор сигналов (АС), разрешающий сравнение кодов всех входных параметров, записанных в БП, между собой. Предположим, что сравн начиня с кодовой комбин пар-ра первого канала. Эта кодовая комбин сравнив с кодовыми комбин всех др каналов, и, если такая же кодовая комбин встречается в одном или нескольких др каналах, то АС последовательно выдает сигнал для формиров кодов адресов каналов, которым принадлежит рассматриваемая кодовая комбин. По окончании формиров кода адреса последнего канала, входящего в это группу каналов, в БП от блока памяти адресов (БПА) подается сигнал считывания данной кодовой комбин, которая вслед за кодами адресов каналов, соответствующих этой кодовой комбин, через формир кадра поступает в БС. При отсутствии кодовой комбин данного канала в остальных каналах БПА выдается сигнал на формиров кода адреса только данного канала, а измерительная кодовая комбин подмешивается к коду вышеуказанным сп-м. Затем производится анализ кодовой комбин второго канала с кодовыми комбин остальных каналов и т.д. В нач каждого телеметрического кадра передается комбинация текущего времени. В работе рассматриваемого передающего устр можно выделить 2 граничных случая. 1)Мгновенные знач сигналов датчиков в одном телеметрическом кадре одинаковы. При этом будет достигнута макс эффективность, т.к. будут переданы все номера датчиков и лишь один код параметра. 2)Мгновенные знач сигналов датчиков распределены по всем возможным уровням квантования. Эффективность передающего устр в этом случае миним. Коэфф сжатия для граничных случаев. M – число уровней квантования; N – число датчиков; m =log M – число разрядов кода параметра; n = long N – число разрядов кода номера датчика. Число двоичных знаков в одном телеметрич кадре, передаваемых неадаптивной адресной многоканальной телеметрич системой, определ выраж
1.Адаптивная с-ма ТИ с рацион постр телеметрич кадра. Данное устр позволяет передать код параметра и коды адресов тех датчиков, сигналы которых в данный момент равны между собой, с погрешностью, определяемой квантованием сигнала по уровню, в одном телеметрическом кадре. Стр схема КП с-мы рис. 1.49. Устр работает след обр. По сигналу с БУ входн пар-ры поступают через коммутатор на АЦП, где происходит их преобразов в код. Код входного пар-ра сравнив с кодом этого же пар-ра в предыд точке отсчета, записанного в ЗУ. Если абсолютное знач разности данного и предыд отсчетов меньше шага квантования, то СС закрыв ключ и не пропускает текущую кодовую комбин на вход буферной памяти (БП). Если эта разность оказыв > шага квантования, то текущая кодовая комбин передается в БП. Т.о. осуществл адаптивная дискретиз входных сигналов и все неизбыточные отсчеты записыв в БП. Далее, с одного из вых БУ поступает сигнал на анализатор сигналов (АС), разрешающий сравнение кодов всех входных параметров, записанных в БП, между собой. Предположим, что сравн начиня с кодовой комбин пар-ра первого канала. Эта кодовая комбин сравнив с кодовыми комбин всех др каналов, и, если такая же кодовая комбин встречается в одном или нескольких др каналах, то АС последовательно выдает сигнал для формиров кодов адресов каналов, которым принадлежит рассматриваемая кодовая комбин. По окончании формиров кода адреса последнего канала, входящего в это группу каналов, в БП от блока памяти адресов (БПА) подается сигнал считывания данной кодовой комбин, которая вслед за кодами адресов каналов, соответствующих этой кодовой комбин, через формир кадра поступает в БС. При отсутствии кодовой комбин данного канала в остальных каналах БПА выдается сигнал на формиров кода адреса только данного канала, а измерительная кодовая комбин подмешивается к коду вышеуказанным сп-м. Затем производится анализ кодовой комбин второго канала с кодовыми комбин остальных каналов и т.д. В нач каждого телеметрического кадра передается комбинация текущего времени. В работе рассматриваемого передающего устр можно выделить 2 граничных случая. 1)Мгновенные знач сигналов датчиков в одном телеметрическом кадре одинаковы. При этом будет достигнута макс эффективность, т.к. будут переданы все номера датчиков и лишь один код параметра. 2)Мгновенные знач сигналов датчиков распределены по всем возможным уровням квантования. Эффективность передающего устр в этом случае миним. Коэфф сжатия для граничных случаев. M – число уровней квантования; N – число датчиков; m =log M – число разрядов кода параметра; n = long N – число разрядов кода номера датчика. Число двоичных знаков в одном телеметрич кадре, передаваемых неадаптивной адресной многоканальной телеметрич системой, определ выраж  Миним число двоичных знаков, получающихся в первом граничном случае, будет
Миним число двоичных знаков, получающихся в первом граничном случае, будет  Макс число двоичных знаков (второй граничный случай) при M < N
Макс число двоичных знаков (второй граничный случай) при M < N  . Коэфф сжатия данных определ отношен числа двоичных знаков в неадаптивной с-ме к числу двоичных знаков в адаптивной с-ме и измен в этом случ от
. Коэфф сжатия данных определ отношен числа двоичных знаков в неадаптивной с-ме к числу двоичных знаков в адаптивной с-ме и измен в этом случ от  до
до 
Если средн число различных уровней квантования, передаваемых в одном телеметрическом кадре, будет равно  Средн число двоичных знаков в одном кадре
Средн число двоичных знаков в одном кадре  При этом коэфф сжатия информ:
При этом коэфф сжатия информ:  (1.90). Анализ выраж (1.90) показыв, что для получ выс коэфф сжатия информ необх сочетание методов рационального построения телеметрич кадра и адаптивной дискретизации в каждом канале.
(1.90). Анализ выраж (1.90) показыв, что для получ выс коэфф сжатия информ необх сочетание методов рационального построения телеметрич кадра и адаптивной дискретизации в каждом канале.
 2 Помехоуст сис-м с ФИМ. Сигнал ФИМ представл собой послед-ть импульсов заданной формы, сдвинутых во времени относ-но тактовых точек на интервалы, пропорцион пар-ру l(t)(передаваемое сообщ). Для одного периода сигнал м.б. записан в виде
2 Помехоуст сис-м с ФИМ. Сигнал ФИМ представл собой послед-ть импульсов заданной формы, сдвинутых во времени относ-но тактовых точек на интервалы, пропорцион пар-ру l(t)(передаваемое сообщ). Для одного периода сигнал м.б. записан в виде  ,где U 0 – амплитуда видеоимпульса; j – функ, описывающ форму импульса единичной амплитуды; t – текущее время, отсчитываемое от нач периода (от тактовой точки); t з – время запаздыв импульса.Пусть время запаздыв импульса равно
,где U 0 – амплитуда видеоимпульса; j – функ, описывающ форму импульса единичной амплитуды; t – текущее время, отсчитываемое от нач периода (от тактовой точки); t з – время запаздыв импульса.Пусть время запаздыв импульса равно  , где t 0 – сред время запаздыв, соответствующ l = 0;
, где t 0 – сред время запаздыв, соответствующ l = 0;  – диапазон измен времени запаздыв.Введем замену переменных
– диапазон измен времени запаздыв.Введем замену переменных  .С учетом этой замены можно запис
.С учетом этой замены можно запис  .Вычислим интеграл
.Вычислим интеграл  .Квадрат среднеквадр приведенной ошибки для ФИМ равен
.Квадрат среднеквадр приведенной ошибки для ФИМ равен  . (*) Как видно из * ошибка тем меньше, чем больше временная девиация импульса
. (*) Как видно из * ошибка тем меньше, чем больше временная девиация импульса  и чем больше значение интеграла. Величина
и чем больше значение интеграла. Величина  характериз скор измен направл на фронтах импульса. Для прямоуг импульса производная была бы бесконечно велика и ошибка при слабых помехах равна нулю, но физич ясно, т.к. помеха не может сместить вертикальный фронт. Однако для передачи такого импульса нужна бесконечно широкая полоса, при которой уровень помех был бы бесконечно велик и наши формулы не верны. Рассмотр один период сигнала ФИМ с трапецеидальным импульсом (рис. 4.1). В теч фронтов импульса
характериз скор измен направл на фронтах импульса. Для прямоуг импульса производная была бы бесконечно велика и ошибка при слабых помехах равна нулю, но физич ясно, т.к. помеха не может сместить вертикальный фронт. Однако для передачи такого импульса нужна бесконечно широкая полоса, при которой уровень помех был бы бесконечно велик и наши формулы не верны. Рассмотр один период сигнала ФИМ с трапецеидальным импульсом (рис. 4.1). В теч фронтов импульса  , а на всей остальной части периода
, а на всей остальной части периода  . Поэтому
. Поэтому  .Подставляя этот рез-т в (*), получим
.Подставляя этот рез-т в (*), получим  . Как видно, ошибка не завис от длительн импульса, а определ только длительностью фронта, амплитудой импульса и временной девиацией .
. Как видно, ошибка не завис от длительн импульса, а определ только длительностью фронта, амплитудой импульса и временной девиацией .
3.Структ схема с-мы ТУ-ТС с част разделением. Образов частотной кодовой комбин, соответствующ определен команде, производится шифрованием операции и адреса объекта, блоком генераторов, ключами и сумматорами при замыкании соответствующих выключателей на пульте диспетчера. На КП радиоимпульсы, выделенные полосов фильтрами, преобраз в видеоимп-сы преобразователями, которые представл собой амплитудные детекторы совместно с пороговыми эл-ми и селекторами импульсов по длительности. Декодирование производится дешифраторами операций и адреса объекта. Сигналы с вых дешифраторов соответст определен команде и управл работой вых исполнительных эл-в. Канал телесигнализ работает аналог обр, за исключ того, что сигнал о сост объектов формир датчиками сигнализ, которые представл собой как контактные, так и бесконтактные ключи. Данная с-ма отлич от с-мы с част избиранием наличием шифраторов и дешифр на ПУ и КП, а остальн эл-ты те же.


Билет №2

 4.Стр схема ПУ цифр с-мы ТИ. Сигнал КИМ (кодо-импульсно-модулированный – это последов 1 и 0, несущих информ о рез-тах отдельн измерений и различную вспомогательную информ) с приемника, где проведено детектиров несущ частоты, фильтрация и усиление сигнала, поступает в устр демодул КИМ. Поскольку двоичный сигнал искажен помехой, перед обработкой он проходит через восстановитель, который отфильтровывает помеху и генерирует имп-сы стандартной формы. Восстановитель представляет собой управляемый интегратор, который накапливает вых напряж с детектора приемника в теч одной двоичной единицы. Если в теч этого времени напряж на интеграторе превысило некоторый порог, считается, что была принята «1», в противном случае считается «0». В первом случ восстановитель выдает стандартный импульс. В конце интервала интегрирования происх сброс напряж интегратора. Работа приемной части управл двумя типами синхронизирующих устр: узлом тактовой синхрониз (УТС) и узлом циклов синхрониз (УЦС). Для подстройки частоты и фазы местного генератора тактовых импульсов может быть использована инерционная с-ма ФАП или с-ма дискретной подстройки. Имп-сы синхронизации кодовых слов и циклов получаются в устр циклов синхрониз. Информ символы принимаются преобразователем послед-ого кода в паралл, который выполняет ответные функц аналогичному преобразователю КП и записыв их в запоминающее устр. Перед регистр производится коррекция ошибок. В УЗО имеются схемы, анализирующ принятые кодовые комбин, и при необходимости производится их исправление в запоминающем устр и выдается разрешение на шину К. Адрес канала выдает распределитель каналов путем подачи сигнала на шину А. Исправленная кодовая комбин поступает на шину И. Шины А, К и И многоразрядные. С этих шин информ в случ необходимости поступ в ЭВМ и на индивидуальные регистрирующие устр, которые м.б. как аналоговыми, так и цифр. При аналог воспроизведении полезных сообщ информ из канальных регистров поступает на входы цифроаналоговых преобразователей (ЦАП), где преобраз с необходимым коэфф в аналог вел-ну и поступает на вход регистрир устр-в. При цифр регистр цифр эквиваленты снимаются с шины И, поступая затем на вход масштабирующих устр, где происх их умножение на соответствующ коэфф с целью выв информ в абсолютных единицах. Масштабир устр явл общим для всех каналов. Промасштабированные цифр эквиваленты записыв в канальные рег-ры, а затем через преобразователь код – код поступают на цифр регистраторы. Преобразователь код – код производит преобразов цифр эквивалента в раб код регистрир устр-ва.
4.Стр схема ПУ цифр с-мы ТИ. Сигнал КИМ (кодо-импульсно-модулированный – это последов 1 и 0, несущих информ о рез-тах отдельн измерений и различную вспомогательную информ) с приемника, где проведено детектиров несущ частоты, фильтрация и усиление сигнала, поступает в устр демодул КИМ. Поскольку двоичный сигнал искажен помехой, перед обработкой он проходит через восстановитель, который отфильтровывает помеху и генерирует имп-сы стандартной формы. Восстановитель представляет собой управляемый интегратор, который накапливает вых напряж с детектора приемника в теч одной двоичной единицы. Если в теч этого времени напряж на интеграторе превысило некоторый порог, считается, что была принята «1», в противном случае считается «0». В первом случ восстановитель выдает стандартный импульс. В конце интервала интегрирования происх сброс напряж интегратора. Работа приемной части управл двумя типами синхронизирующих устр: узлом тактовой синхрониз (УТС) и узлом циклов синхрониз (УЦС). Для подстройки частоты и фазы местного генератора тактовых импульсов может быть использована инерционная с-ма ФАП или с-ма дискретной подстройки. Имп-сы синхронизации кодовых слов и циклов получаются в устр циклов синхрониз. Информ символы принимаются преобразователем послед-ого кода в паралл, который выполняет ответные функц аналогичному преобразователю КП и записыв их в запоминающее устр. Перед регистр производится коррекция ошибок. В УЗО имеются схемы, анализирующ принятые кодовые комбин, и при необходимости производится их исправление в запоминающем устр и выдается разрешение на шину К. Адрес канала выдает распределитель каналов путем подачи сигнала на шину А. Исправленная кодовая комбин поступает на шину И. Шины А, К и И многоразрядные. С этих шин информ в случ необходимости поступ в ЭВМ и на индивидуальные регистрирующие устр, которые м.б. как аналоговыми, так и цифр. При аналог воспроизведении полезных сообщ информ из канальных регистров поступает на входы цифроаналоговых преобразователей (ЦАП), где преобраз с необходимым коэфф в аналог вел-ну и поступает на вход регистрир устр-в. При цифр регистр цифр эквиваленты снимаются с шины И, поступая затем на вход масштабирующих устр, где происх их умножение на соответствующ коэфф с целью выв информ в абсолютных единицах. Масштабир устр явл общим для всех каналов. Промасштабированные цифр эквиваленты записыв в канальные рег-ры, а затем через преобразователь код – код поступают на цифр регистраторы. Преобразователь код – код производит преобразов цифр эквивалента в раб код регистрир устр-ва.
5 Помехоуст передачи дискретных сигналов. Помехоуст назыв способность с-мы правильно принимать информ, несмотря на воздействия помех. Для оценки помехоуст дискретных (двоичных) элементарных сигналов использ вероятностный критерий. Наиболее выс помехоустойчивостью обладает так называемый идеальный приёмник Котельникова, который обеспечив при данном способе передачи наилучшую помехоустойчивость, называемую потенциальной.
 Потенциальная помехоуст – это предельно допустимая помехоуст, которая м.б. обеспечена идеальным приёмником. Теория потенциальной помехоуст развита для флуктуационных помех. Идея построения идеального приёмника заключ в том, что, зная, какие сигналы должны быть переданы, и имея их образцы, он сравнивает полученные сигналы
Потенциальная помехоуст – это предельно допустимая помехоуст, которая м.б. обеспечена идеальным приёмником. Теория потенциальной помехоуст развита для флуктуационных помех. Идея построения идеального приёмника заключ в том, что, зная, какие сигналы должны быть переданы, и имея их образцы, он сравнивает полученные сигналы  по очереди с этими образцами [
по очереди с этими образцами [  и
и  ] и, вычисляя энергию разности принятого сигнала и образца (величины
] и, вычисляя энергию разности принятого сигнала и образца (величины  или
или  ), относит принятый сигнал к тому сигналу, для которого эта разность минимальна
), относит принятый сигнал к тому сигналу, для которого эта разность минимальна  ;
;  . Если
. Если  , то считаем принятым сигнал
, то считаем принятым сигнал  , а если
, а если  – сигнал
– сигнал  .Изменяя величину
.Изменяя величину  , можно регулиров соотношение вероятностей превращения одного сигнала в др. Стр схема идеального приёмника Котельникова на рис. 3.1. Помехоуст идеального приёмника м.б. рассчитана по фор-м:
, можно регулиров соотношение вероятностей превращения одного сигнала в др. Стр схема идеального приёмника Котельникова на рис. 3.1. Помехоуст идеального приёмника м.б. рассчитана по фор-м:  ,
,  . Здесь
. Здесь  – табличная огранич функция
– табличная огранич функция  ,
,  – вел, характериз потенциальную помехоуст,
– вел, характериз потенциальную помехоуст,  ; – параметр, характериз пороговые св-ва приёмника
; – параметр, характериз пороговые св-ва приёмника  ,где
,где  – удельное напряж помехи в полосе частот 1 Гц
– удельное напряж помехи в полосе частот 1 Гц  , где
, где  – пороговое знач сигнала;
– пороговое знач сигнала;  – среднеквадратич знач напряж помехи;
– среднеквадратич знач напряж помехи;  – полоса пропускания приёмника. При симметричном канале, когда вероятность подавления команды и образов ложной одинаковы,
– полоса пропускания приёмника. При симметричном канале, когда вероятность подавления команды и образов ложной одинаковы,  и
и  .
.
6(70).Программная перестройка частоты. Для того, чтобы радиообмен нельзя было перехватить или подавить узкопол шумом, было предложено ввести передачу с пост сменой несущей в пределах широкого диапазона частот. В рез-те мощность сигнала распределялась по всему диапазону, и прослушивание какой-то определенной частоты давало только небольшой шум. Послед-ть несущих частот была псевдослуч, известной только передатчику и приемнику. Попытка подавления сигнала в каком-то узком диапазоне также не слишком ухудшала сигнал, т.к. подавлялась только небольшая часть информ. Идею этого метода иллюстрирует рис1.7. В теч фиксиров интервала времени передача ведется на неизменной несущ частоте. Для того, чтобы приемник синхронизировался с передатчиком, для обозначения начала каждого периода передачи в течение некоторого времени передаются синхробиты. Так что полезная скор этого метода кодиров оказыв меньше из-за постоянных накладных расходов на синхрониз. Структ схема с-мы с программной перестройкой рабочей частоты (ППРЧ) на рис 1.8. Несущая частота меняется в соотв с номерами частотных подканалов, вырабатываемых алгоритмом генератора ПСП.
Псевдослуч послед-ть завис от некоторого пар-ра, который назыв начальн числом. Если приемнику и передатчику известны алгоритм и знач нач числа, то они меняют частоты в одинак послед-ти, называемой послед-тью псевдослуч перестройки частоты.
Если частоты смены подканалов ниже, чем скор передачи данных в канале, то такой режим назыв медленным расшир спектра (рис 1.9); в противном случае имеем дело с быстрым расширением спектра (рис1.10). Поэтому выполн след соотнош:
Для медленной ППРЧ  . Для быстрой ППРЧ
. Для быстрой ППРЧ  .
.
Если в синтезаторе формир М частот с шагом  , то занимаемая сигналом с ППРЧ ширина полосы частот:
, то занимаемая сигналом с ППРЧ ширина полосы частот:  (медленная ППРЧ
(медленная ППРЧ 
 .
.
Метод быстр расширения спектра более устойчив к помехам, поскольку узкопол помеха, которая подавляет сигнал в определен подканале, не приводит к потере бита, т.к. его знач повтор несколько раз в различных частотных подканалах. В этом реж не проявл эффект межсимвольной интерференции, потому что ко времени прихода задержанного вдоль одного из путей сигнала с-ма успевает перейти на др частоту.
Метод медленного расшир спектра таким св-м не обладает, но зато он проще в реализ и сопряжен с меньшими накладными расходами. Определ знач выигрыша G при обработке, обеспечиваемого сигналом с ППРЧ.
В случ медлен перестройки ∆ f=Rb и∆ Fb=Rb, поэтому  (2. 9)
(2. 9)
В случ быстрой перестройки один и тот же символ сообщ передается на N различных частотах (кратность повторения равна N),поэтому ∆ f=R s =RbN и выигрыш  (2.10)
(2.10)
Т.о, для сигналов с быстрой ППРЧ выигрыш при обработке определ не только количеством используемых частот М, нои кратностью повторения N. Следует подчеркнуть, что в случае быстрой ППРЧ при определении коэффициента помехозащищенности необходимо учитывать дополнительные энергетические потери, связанные с некогерентным сложением N=R c/ R b элементов сигнала, передаваемых на различных частотах. Это сложение осуществляется при формировании статистики, по которой производится оценка символа передаваемого сообщения в демодуляторе. В частности, методы ППРЧ позволяют организовать одновременную работу нескольких каналов путем выбора для каждого канала таких псевдослучайных последовательностей, чтобы в каждый момент времени каждый канал работал на своей частоте.
Билет №3
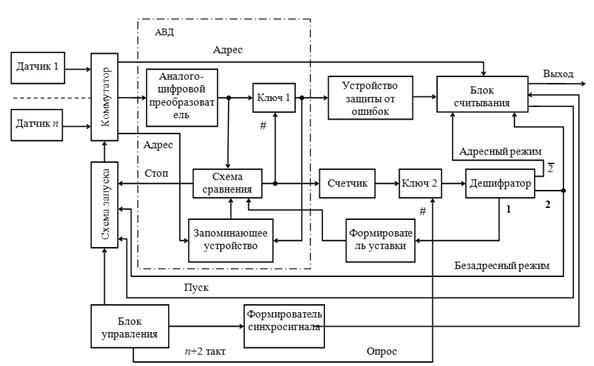 7.Сист ТИ с адаптивной дискретиз. Принцип действ сис-м с адапт дискретиз заключ в исключ несуществ координат, что м. б. реализ с помощ спец устр-в – адаптивных врем дискретизаторов (АВД). Вход сигналы от датчиков поочередно через коммутатор поступают на АЦП. Паралл код вх сигнала сравн в схеме сравн (СС) с кодом предыд отсчета, поступ от запоминающ устр (ЗУ). Если знач вх сигнала отлич от знач предыд отсчета на величину, превыш порог сраб (зад доп погрешность
7.Сист ТИ с адаптивной дискретиз. Принцип действ сис-м с адапт дискретиз заключ в исключ несуществ координат, что м. б. реализ с помощ спец устр-в – адаптивных врем дискретизаторов (АВД). Вход сигналы от датчиков поочередно через коммутатор поступают на АЦП. Паралл код вх сигнала сравн в схеме сравн (СС) с кодом предыд отсчета, поступ от запоминающ устр (ЗУ). Если знач вх сигнала отлич от знач предыд отсчета на величину, превыш порог сраб (зад доп погрешность  ), то СС выдает сигнал на схему запуска (СЗ) коммутатора и коммутатор останавлив на данной точке, одновр открыв ключ (К) и цифр эквивалент с АЦП подается в УЗО и записыв нов знач в ЗУ. В УЗО код комбин кодир в коррект коде и подается в блок считывания (БС). БС передает в ЛС синхрокод, адр датчика с существенным отсчетом и цифр эквивалент телеметр параметра. После оконч передачи БС открыв СЗ и коммутатор опраш след датчик. Если же знач отсчета входн сигнала не отлич от знач предыд, т.е. отсчет явл избыточным, то СС не срабатыв, коммутатор не останавлив и через определ вр коммутатор подключ ко вх АЦП очередной датчик. Для исключ случаев появл аномальных погр исп-ся ОС по погрешности (счетчик, ключ 2, дешифр и формир уставки). Счетчик подсчит число неизбыточных отсчетов. Если число, зафикс счетчиком, укажет на возможн появл аном погрешностей, дешифр с вых 1 выдаст сигнал на формир уставки, который устанавл нов порог срабатыв схемы сравн. Т.о, в след цикле будут опрошены датчики, у кот погрешность будет наибольшей. Число неизбыт отсчетов счетчиком сравнив с допуст числом этих отсчетов (это усл выполняет дешифр), рассчитанным из усл равенства объема сигнала при сжатии и при безадр передаче без сжатия:
), то СС выдает сигнал на схему запуска (СЗ) коммутатора и коммутатор останавлив на данной точке, одновр открыв ключ (К) и цифр эквивалент с АЦП подается в УЗО и записыв нов знач в ЗУ. В УЗО код комбин кодир в коррект коде и подается в блок считывания (БС). БС передает в ЛС синхрокод, адр датчика с существенным отсчетом и цифр эквивалент телеметр параметра. После оконч передачи БС открыв СЗ и коммутатор опраш след датчик. Если же знач отсчета входн сигнала не отлич от знач предыд, т.е. отсчет явл избыточным, то СС не срабатыв, коммутатор не останавлив и через определ вр коммутатор подключ ко вх АЦП очередной датчик. Для исключ случаев появл аномальных погр исп-ся ОС по погрешности (счетчик, ключ 2, дешифр и формир уставки). Счетчик подсчит число неизбыточных отсчетов. Если число, зафикс счетчиком, укажет на возможн появл аном погрешностей, дешифр с вых 1 выдаст сигнал на формир уставки, который устанавл нов порог срабатыв схемы сравн. Т.о, в след цикле будут опрошены датчики, у кот погрешность будет наибольшей. Число неизбыт отсчетов счетчиком сравнив с допуст числом этих отсчетов (это усл выполняет дешифр), рассчитанным из усл равенства объема сигнала при сжатии и при безадр передаче без сжатия:  (N – число источн сообщ, M – число уровн квантов сигнала, Kc – коэфф сжатия по отсчетам за цикл опроса). Знач коэфф сжатия, при кот адапт и неадапт сис-мы будут иметь одинак эффективн (граничн случ):
(N – число источн сообщ, M – число уровн квантов сигнала, Kc – коэфф сжатия по отсчетам за цикл опроса). Знач коэфф сжатия, при кот адапт и неадапт сис-мы будут иметь одинак эффективн (граничн случ):  . При
. При  эффективной будет адаптив сис-ма с адресами, а при
эффективной будет адаптив сис-ма с адресами, а при  больш эффек-ть будет иметь неадаптивная безадр сис-ма. Для согласов хар-к входн потока сообщ с хар-ми канала св возможна постановка буферного запоминающ устр в БС. Погрешность телеметр сис-мы, ее быстрод и полоса частот канала св связаны след зависим:
больш эффек-ть будет иметь неадаптивная безадр сис-ма. Для согласов хар-к входн потока сообщ с хар-ми канала св возможна постановка буферного запоминающ устр в БС. Погрешность телеметр сис-мы, ее быстрод и полоса частот канала св связаны след зависим:  , где Т – период дискретиз; – полоса частот канала св;
, где Т – период дискретиз; – полоса частот канала св;  – мощн соответст сигнала и шума в канале.
– мощн соответст сигнала и шума в канале.
8.Расчёт помехоуст итеративного и кода Хемминга. Итеративный код. Рассм блок, содерж m строк и n столбцов, кот включ в себя строку и столбец защиты по паритету (кодом с проверкой на чётн или нечётность). Данный код имеет код расст d= 4 и позвол исправл одиночные ошибки. Тогда полная вероятность правильн приёма будет  Ложный приём в итеративном коде обусловл искажениями, приводящими к появл чётных ошибок одновр в строках и столбцах. Так, вероятность ложного приёма из - за четырёхкратных ошибок
Ложный приём в итеративном коде обусловл искажениями, приводящими к появл чётных ошибок одновр в строках и столбцах. Так, вероятность ложного приёма из - за четырёхкратных ошибок  .
.
Код Хэмминга с d=4. Данный код позвол исправл одиночные и обнаруж двоичные ошибки. Полная вероятн прав приема определ выраж  . Ошибочный прием при d =4 обусловлен ошибкой кратности, большей 2х, и оценив вероятностью
. Ошибочный прием при d =4 обусловлен ошибкой кратности, большей 2х, и оценив вероятностью  . Вероятность возникнов обнаруж ошибки
. Вероятность возникнов обнаруж ошибки 
 .
.
9.Программн перестройка врем полож импульсных сигналов. Характерной особенностью сис-мы св сППВП сигналов явл импульсный режим передачи. Поэтому дляисточн дискр сообщ передача осуществл после предвар преобразов в пакеты длительностью  впределах цикла длительностью
впределах цикла длительностью  . Пакет занимает опред врем интервал в пределах цикла, а номер врем интервала опред-ся сегментом псевдослуч послед-ти, формир ГПСП. Устр формир пакетов осущ врем сжатие последовательн символов передаваемого сообщ (трансформацию скор). При этом скор передачи увелич пропорц коэфф сжатия.
. Пакет занимает опред врем интервал в пределах цикла, а номер врем интервала опред-ся сегментом псевдослуч послед-ти, формир ГПСП. Устр формир пакетов осущ врем сжатие последовательн символов передаваемого сообщ (трансформацию скор). При этом скор передачи увелич пропорц коэфф сжатия.  - скважность передачи.
- скважность передачи.
Определ знач выигрыша при обработке, обеспечиваемого при ППВП. В пределах цикла при наличии М врем слотов в каждом врем слоте необх передать k двоичных символов сообщ. Поэтому длительность элемента сигнала  m – кратность манипул.
m – кратность манипул.
При фазовой манипул несущей и прямоуг форме импульсов модулирующ сигнала ширина полосы частот  . Т.к. ширина полосы частот сигнала передаваемого сообще равна
. Т.к. ширина полосы частот сигнала передаваемого сообще равна  , то при ППВП выигрыш
, то при ППВП выигрыш 
Вывод: частота, на кот абонент передает информ, постоянна. Интервалы времени передачи неизвестны и малы. Поэтому при наличии многих абонентов, одновр передающ информ, приемнику перехвата трудно выделить начало и конец передачи одного абонента и решить, какая информ предназнач каждому абоненту.
Билет №4
 10.Телеметрич системы с адаптивной коммутацией. Выбир некоторая частота опроса измерит каналов АТИС и при помощи спец устр-в - анализаторов акт-ти сигналов (ААС) определ канал с наиб погрешностью. Знач-я измеряемой вел-ны в этом канале и передаются на ПУ. Такт частота передачи измерит инф-ции по каналу св остается постоян, меньшей чем при равномерной временной дискретиз, этим и достиг сжатие данных. В общ случае адаптивная коммутация представл собой сп-б измен частоты опроса источников измерит-х сообщ в соответст со скор измен входн сигнала. По оконч считыв предыд отсчета ко вх АЦП подключ первый датчик. Рез-т записыв в буферное запомин устр (БЗУ), и одновр поступ на один из вх цифр схемы сравн (СС). На второй вх этой схемы с ЗУ поступ цифр эквивал предыд знач. Разностный сигнал, пропорц-й текущ погр-ти, подается в блок выдел максим погрешности (БВМП). Если очередная погрешность превыш погрешность предыд каналов, то в БПА записыв адрес данного канала. По оконч опроса всех датчиков БУ производит опрос БПА. Адр канала с макс погрешностью подается через ключ 2 в БЗУ и БС. Одновр сигналом из БУ открыв ключ 1, через который из БЗУ поступит в УЗО кодов комбин измер канала, у кот максим погрешность, а затем в БС. Блок считыв формир кадр (синхрокод, адрес датчика с макс погр-ю и его цифр эквивалент). После чего по сигналу с БС начинается нов цикл.
10.Телеметрич системы с адаптивной коммутацией. Выбир некоторая частота опроса измерит каналов АТИС и при помощи спец устр-в - анализаторов акт-ти сигналов (ААС) определ канал с наиб погрешностью. Знач-я измеряемой вел-ны в этом канале и передаются на ПУ. Такт частота передачи измерит инф-ции по каналу св остается постоян, меньшей чем при равномерной временной дискретиз, этим и достиг сжатие данных. В общ случае адаптивная коммутация представл собой сп-б измен частоты опроса источников измерит-х сообщ в соответст со скор измен входн сигнала. По оконч считыв предыд отсчета ко вх АЦП подключ первый датчик. Рез-т записыв в буферное запомин устр (БЗУ), и одновр поступ на один из вх цифр схемы сравн (СС). На второй вх этой схемы с ЗУ поступ цифр эквивал предыд знач. Разностный сигнал, пропорц-й текущ погр-ти, подается в блок выдел максим погрешности (БВМП). Если очередная погрешность превыш погрешность предыд каналов, то в БПА записыв адрес данного канала. По оконч опроса всех датчиков БУ производит опрос БПА. Адр канала с макс погрешностью подается через ключ 2 в БЗУ и БС. Одновр сигналом из БУ открыв ключ 1, через который из БЗУ поступит в УЗО кодов комбин измер канала, у кот максим погрешность, а затем в БС. Блок считыв формир кадр (синхрокод, адрес датчика с макс погр-ю и его цифр эквивалент). После чего по сигналу с БС начинается нов цикл.
11.Помехоуст систем с дублированием сообщ. Основано на многократном повтор кодовых неизбыточных сообщ. При приеме кодов сообщ сравнив покомбинационно либо поэлементно. Сообщ, принятое одинаковым большее число раз, считается принятым прав. Наименьшее число повторений каждого сообщ равно трем. В случае покомбинационного сравн правильн прием любого сообщ неизбыточного двоичного кода  возможен, если все 3 комбин приняты без искаж либо 2 из 3 комбин не искаж. Вероятность этого:
возможен, если все 3 комбин приняты без искаж либо 2 из 3 комбин не искаж. Вероятность этого:  , где
, где  – вероятн прав приема всей код комбин;
– вероятн прав приема всей код комбин;  – вероятн искаж элемент посылки. В общ случае при установленном критерии большинства
– вероятн искаж элемент посылки. В общ случае при установленном критерии большинства  (2 из 3, 3 из 5 и т.д.) вер-сть прав приема код комбин при ее повторении
(2 из 3, 3 из 5 и т.д.) вер-сть прав приема код комбин при ее повторении  раз
раз  , где
, где  – вероятность прав приема код комбин. В случае поэлементного сравн дублируемых код сообщ критерий большинства позвол определ правильно принятый элемент (1 или 0). Вероятность прав приема всей комбин при ее 3кратном повтор:
– вероятность прав приема код комбин. В случае поэлементного сравн дублируемых код сообщ критерий большинства позвол определ правильно принятый элемент (1 или 0). Вероятность прав приема всей комбин при ее 3кратном повтор:  , где – вероятность прав приема одного эл, соответствующ критерию 2 из 3. В общ случ при критерии большинства для поэлементного сравн вероятность прав приема код комбин при ее повтор раз
, где – вероятность прав приема одного эл, соответствующ критерию 2 из 3. В общ случ при критерии большинства для поэлементного сравн вероятность прав приема код комбин при ее повтор раз  , где вероятн искаж элементарной посылки в симметричном канале св.
, где вероятн искаж элементарной посылки в симметричном канале св.
12.ПСП Требования к ПСП. Для расширения спектра сигналов, предъявляются следующие требования: 1. большой объем ансамбля последовательностей, формируемых с помощью единого алгоритма 2. «хорошие» авто- и взаимно-корреляционные свойства последовательностей, входящих в состав ансамбля; 3. сбалансированность структуры, то есть число единиц и нулей в ней должно отличаться не более чем на один символ; 4. максимальный период для заданной длины регистра сдвига, формирующего последовательность; 5. непредсказуемость структуры последовательности по ее неискаженному сегменту ограниченной длины.

 Псевдослучайной бинарной последовательностью длительностью называют последовательность, сформированную по определенным правилам из дискретных элементов 0 и 1 так, чтобы ее корреляционные свойства были близки к соответствующим свойствам шумовой реализации такой же длительности. Такие последовательности в литературе часто назыв М-последовательностями, а величину N- длиной (периодом) последовательности.
Псевдослучайной бинарной последовательностью длительностью называют последовательность, сформированную по определенным правилам из дискретных элементов 0 и 1 так, чтобы ее корреляционные свойства были близки к соответствующим свойствам шумовой реализации такой же длительности. Такие последовательности в литературе часто назыв М-последовательностями, а величину N- длиной (периодом) последовательности.
Пример: q = 0100; 
N – период последовательности.
последовательность, снятая с выхода ячейки DD4 М = [010001111010110]

Схема генератора с f(x)=x^4+x+1. На рисунке приведена функциональная схема генератора М-последовательности, имеющая длину (период последовательности):
Таблица 2.1 – Процесс формирования М-последовательности, длиной N=15
| Номер такта | Состояние ячеек | Выход | |||
| DD1 | DD2 | DD3 | DD4 | ||
  
|  
| 
| 
| ||
| … | … | … | … | … | … |
Далее делается по аналогии до 15 строки.
Билет №5
 13.Телеметр сист с автомат регул частоты опроса датчиков. При сильной корреляции входных сигналов, т.е. в случ, если входные сигналы меняются одновр, возможно использов метода автоматич регулиров частоты опроса датчиков, позволяющего получить сжатие по отсчетам при меньших аппаратурных затратах. В данном устр все каналы опрашиваются поочередно др за др по сигналам бл упр через коммутатор. Частота опроса определ синтезатором частот. Входные сигналы от датчиков поочередно поступ на АЦП, где происх преобразов аналог сигнала в k-разрядный код. Параллельн код входн сигнала сравнив в цифр схеме сравн с кодом предыдущего отсчета своего канала, поступающего от многоканального запоминающ устр. Если знач входн сигнала отлич от знач предыдущ отсчета на вел-ну, превышающую порог срабатыв, который определ допустимой погрешностью, то на вх СС появл логич 1, которая поступает в счетчик. Т.о, за полный цикл в счетчике будет зафиксировано число неизбыточных отсчетов. Кодовая комбин с вых АЦП в параллельном виде поступ в УЗО и одновр через ключ 2, который управл импульсами от БУ, записыв в многоканальное ЗУ и будет участвовать в сравн в след цикле. Кодов комбин, закодированные в помехозащищ коде, из УЗО поступают в БС, где преобраз в последоват код и совместно с синхросигналом поступают в передатчик. После окончания передачи информ от всех каналов БС запускает БУ и цикл повтор. БУ после преобразов информ от всех каналов через ключ 1 опрашивает счетчик неизбыточных отсчетов. Дешифратор выдает пропорциональный записанному в счетчике числу сигнал на синтезатор частот, который измен частоту такт импульсов (скор опроса датчиков). Т.о, частота опроса датчиков завис от суммарной допустимой погрешности по всем каналам. Применяя в данных устр-х микроконтроллеры, можно реализов люб алгоритм автоматич регулиров частоты опроса датчиков: по максим погрешности, по наиболее быстро изменяющимся входн сигналам, по суммарной погрешности и т.д.
13.Телеметр сист с автомат регул частоты опроса датчиков. При сильной корреляции входных сигналов, т.е. в случ, если входные сигналы меняются одновр, возможно использов метода автоматич регулиров частоты опроса датчиков, позволяющего получить сжатие по отсчетам при меньших аппаратурных затратах. В данном устр все каналы опрашиваются поочередно др за др по сигналам бл упр через коммутатор. Частота опроса определ синтезатором частот. Входные сигналы от датчиков поочередно поступ на АЦП, где происх преобразов аналог сигнала в k-разрядный код. Параллельн код входн сигнала сравнив в цифр схеме сравн с кодом предыдущего отсчета своего канала, поступающего от многоканального запоминающ устр. Если знач входн сигнала отлич от знач предыдущ отсчета на вел-ну, превышающую порог срабатыв, который определ допустимой погрешностью, то на вх СС появл логич 1, которая поступает в счетчик. Т.о, за полный цикл в счетчике будет зафиксировано число неизбыточных отсчетов. Кодовая комбин с вых АЦП в параллельном виде поступ в УЗО и одновр через ключ 2, который управл импульсами от БУ, записыв в многоканальное ЗУ и будет участвовать в сравн в след цикле. Кодов комбин, закодированные в помехозащищ коде, из УЗО поступают в БС, где преобраз в последоват код и совместно с синхросигналом поступают в передатчик. После окончания передачи информ от всех каналов БС запускает БУ и цикл повтор. БУ после преобразов информ от всех каналов через ключ 1 опрашивает счетчик неизбыточных отсчетов. Дешифратор выдает пропорциональный записанному в счетчике числу сигнал на синтезатор частот, который измен частоту такт импульсов (скор опроса датчиков). Т.о, частота опроса датчиков завис от суммарной допустимой погрешности по всем каналам. Применяя в данных устр-х микроконтроллеры, можно реализов люб алгоритм автоматич регулиров частоты опроса датчиков: по максим погрешности, по наиболее быстро изменяющимся входн сигналам, по суммарной погрешности и т.д.
14. Потенц помехоуст АМ. При АМ сигнал имеет вид  . Находим частную производную
. Находим частную производную  , а средн знач квадрата этой величины (средн мощн)
, а средн знач квадрата этой величины (средн мощн)  при
при  . Спектральная плотность шума на вых приемника
. Спектральная плотность шума на вых приемника  . Поскольку она не завис от частоты, то при
. Поскольку она не завис от частоты, то при  получим
получим  . Тогда получим *
. Тогда получим *  . Потенциальная помехоустойчивость ЧМ. Сигнал на вх приемника имеет вид
. Потенциальная помехоустойчивость ЧМ. Сигнал на вх приемника имеет вид  , где wд – девиация частоты. Част модул относ к интегральным видам, а поэтому частная произв будет
, где wд – девиация частоты. Част модул относ к интегральным видам, а поэтому частная произв будет  . Ср знач этой произв
. Ср знач этой произв 
Спектр плотность шума на вых приемника  . Тогда мощн шума на вых приемника
. Тогда мощн шума на вых приемника  . После подстановки Pш.вых в выражение * получим
. После подстановки Pш.вых в выражение * получим  . Как видно из получ выраж, ошибка при ЧМ определ девиацией частоты, быстродействием и соотнош мощности сигнала и удельной мощности помехи. Ошибка не завис от частоты несущей.
. Как видно из получ выраж, ошибка при ЧМ определ девиацией частоты, быстродействием и соотнош мощности сигнала и удельной мощности помехи. Ошибка не завис от частоты несущей.
15. Св-ва ПСП. Как указывалось выше, от свойств ПСП зависят основные характеристики систем с ШПС. Рассмотрим основные из них.
1. Балансное св. Каждая М-послед содерж 2k-1 символов 1 и 2k-1 символов 0 или число единиц и нулей в ней должно отлич не более чем на один символ. Это требов важно для исключ пост составляющей информац сигнала.
2. Св полноты состояний. Сост разрядов регистра сдвига, формирующего М-послед, можно представить полным набором k-разрядных двоичных чисел за исключ числа, содержащего нули во всех разрядах. Сост «все нули» является запрещ.
3. Св цикличо сдвига при сложении. Сложение по  M-послед и некоторого ее циклич сдвига дает в рез-те др циклич сдвиг той же самой послед-ти. Это св-во иллюстрируется на рисунке.
M-послед и некоторого ее циклич сдвига дает в рез-те др циклич сдвиг той же самой послед-ти. Это св-во иллюстрируется на рисунке.
4 Св децимации. Послед-ть, образованная из взятых через один символов исх М-послед, по стр-ре совпад с исх, но имеет в 2 раза ниже тактовую частоту. (рис) Нетрудно убедиться, что эти послед-ти явл циклич сдвигами исх М-послед, но с тактовой частотой fТ/2. Сдвиг между ними равен 7,5 тактовым интервалам или половине длины послед-ти.
5 .Корреляц св. Корреляц св-ва кодовых послед-тей в широкопол системах завис от типа код послед-ти, ее длины, частоты следования символов и посимвольной стр-ры. Приемник сравнив полученную кодовую послед с точной ее копией, хранящейся в памяти. Когда он обнаруж корреляцию между ними, то перех в реж приема информ, устанавлив синхронизацию и начинает операцию декодиров полезной инф. Люб частичные корреляции могут привести к ложному срабатыв и нарушению раб приемника, вот почему кодовая послед-ть должна обладать хорошими корреляц св-ми. Рассмотрим понятие корреляции более подробно. В общ виде автокоррел функ (АКФ) определ интегралом  и показыв связь сигнала со своей копией, смещенной во времени на вел-ну
и показыв связь сигнала со своей копией, смещенной во времени на вел-ну  . Взаимокорр функц (ВКФ) имеет большое знач для с-м с кодовым раздел абонентов и отлич от АКФ только тем, что под знаком интеграла стоят разные функции:
. Взаимокорр функц (ВКФ) имеет большое знач для с-м с кодовым раздел абонентов и отлич от АКФ только тем, что под знаком интеграла стоят разные функции:  ВКФ показывает, таким обр, степень соответствия одной кодовой послед-ти другой. Чтобы упростить понятия АКФ и ВКФ, можно представить значе той или иной функции как разность между числом совпадений А и несовпадений Б символов кодовых последовательностей при их посимвольном сравнении.
ВКФ показывает, таким обр, степень соответствия одной кодовой послед-ти другой. Чтобы упростить понятия АКФ и ВКФ, можно представить значе той или иной функции как разность между числом совпадений А и несовпадений Б символов кодовых последовательностей при их посимвольном сравнении.
 6. Спектральные св. Спектр псевдослучайного сигнала содержит постоянную и дискретные спектральные составляющие, следующие через интервал
6. Спектральные св. Спектр псевдослучайного сигнала содержит постоянную и дискретные спектральные составляющие, следующие через интервал  . Огибающая дискретных спектральных составляющих определяется функцией
. Огибающая дискретных спектральных составляющих определяется функцией  . Поэтому амплитуда спектральных составляющих равна нулю на частотах f=k∆τ0. Спектральная плотность биполярного сигнала изображена на рисунке. Путем увеличения периода M-последовательности можно уменьшить интервал между спектральными составляющими, сделав спектр практически сплошным. При этом спектральная плотность в пределах полосы частот, равной 2/∆τ0 становится почти равномерной.
. Поэтому амплитуда спектральных составляющих равна нулю на частотах f=k∆τ0. Спектральная плотность биполярного сигнала изображена на рисунке. Путем увеличения периода M-последовательности можно уменьшить интервал между спектральными составляющими, сделав спектр практически сплошным. При этом спектральная плотность в пределах полосы частот, равной 2/∆τ0 становится почти равномерной.
7. Криптостойкость. Структура М-послед легко может быть раскрыта по ее неискаженному сегменту, содержащему 2k символов. Действительно, каждый символ сегмента удовлетворяет линейному рекуррентному соотнош  , поэтому можно записать след систему линейных уравнений:
, поэтому можно записать след систему линейных уравнений:  *
*
где  – состояние триггеров;
– состояние триггеров;  – коэффициенты принимающие значение 1 или 0 в зависимости от того, какие ячейки триггеров участвуют в формировании обратной связи. Эта система уравнений относительно неизвестных коэффициентов
– коэффициенты принимающие значение 1 или 0 в зависимости от того, какие ячейки триггеров участвуют в формировании обратной связи. Эта система уравнений относительно неизвестных коэффициентов  может быть решена
может быть решена