Вопрос 36
Дифференциал предназначен для распределения крутящего момента между двумя ведомыми валами, которым он позволяет вращаться с неодинаковыми скоростями, обычно при движении автомобиля на поворотах или по неровностям.
Классификация дифференциалов
Дифференциалы подразделяются по следующим основным классификационным признакам: по назначению (по месту расположения): межколесные, межосевые, межтележечные
по соотношению моментов на ведомых валах: симметричные (разделяют моменты на ведомые валы поровну); несимметричные (разделяют моменты на ведомые валы не поровну, но в заданном соотношении)
по типу передачи: зубчатые с цилиндрическими или с коническими зубчатыми колесами, червячные, кулачковые
по возможности блокировки: неблокируемые, блокируемые с принудительной блокировкой или самоблокируюшиеся (частично или полностью)
Основные требования к дифференциалам следующие:
- распределение крутящего момента между ведомыми валами в заданном соотношении;
- хорошая устойчивость (без заносов) при движении на поворотах и по неровной дороге, а также высокие тяговые свойства при движении вне дорог.
Кроме того, к дифференциалам, как и к остальным механизмам автомобиля, предъявляют также общие требования:
- обеспечение минимальных размеров и массы
- высокая надежность
- минимальное обслуживание
- технологичность
Кинематические связи. Дифференциалы, применяемые в автомобилях, представляют собой трехзвенные планетарные механизмы с двумя степенями свободы. Тремя звеньями дифференциала являются: водило (корпус дифференциала), сателлиты, полуосевые шестерни.
Силовые связи в дифференциале определяют соотношение моментов между центральными звеньями.
Рассмотрим принцип работы дифференциала на примере простого симметричного конического (рис. 5.8). При передаче крутящего момента от двигателя на корпус дифференциала в месте контакта сателлитов с осью их вращения возникает сила F. Так как сателлит можно представить в виде рычага с равными плечами, то сила F делится пополам между полуосевыми шестернями.
Тогда момент, подводимый к корпусу дифференциала,
Мв= FB,
а момент, подводимый к левой и правой полуосевым шестерням,
Ма1=Ма2=0,5FB=0.5Mв
Это равенство выражает первое свойство простого симметричного дифференциала (без учета потерь на трение)- равное распределение моментов между полуосевыми шестернями.
Таким образом, для любых схем простых симметричных дифференциалов (рис. 5.7,а и б), пренебрегая внутренними потерями на трение, моменты на полуосях распределяются поровну:
Ма1=Ма2=0,5Мв и Мв=Ма1+Ма2,
где Мв, Ма1 и Ма2 — крутящий момент, подводимый соответственно к корпусу 4 дифференциала, левой 2 и правой 6 полуосевым (солнечным) шестерням.
Для простого несимметричного цилиндрического дифференциала (см. рис. 5.7,в) крутящий момент Мс, подводимый к эпициклической шестерне, больше чем к солнечной Ма. При этом
Мс=Мак,
где к = Zc/Za- характеристика трехзвенного дифференциального механизма (передаточное число при остановленном корпусе дифференциала); Zc и Za- число зубьев соответственно эпициклической и солнечной шестерен дифференциала.
В существующих конструкциях несимметричных дифференциалов
к = 1,5...4,5.
Момент, подводимый к корпусу дифференциала,
Мв=Ма+Мс,
где Ма =Мв/(1 + к), а Мс = Мвк/(1 + к).
В простом несимметричном коническом дифференциале
Ма2 = Ма1 К,
где к = Za2/Za1 - характеристика трехзвенного дифференциального механизма (передаточное число при остановленном корпусе дифференциала); Za2 и Za1- число зубьев соответственно большой и малой полуосевых (солнечных) шестерен.
При этом
Mв=Ma1+Ma2,
где Ma1 = Mв/(1 + к), а Ma2 = Mвк/(1 + к).
Кинематические связи в дифференциале представляются уравнением кинематики трехзвенного дифференциального механизма, связывающим между собой частоты вращения всех центральных звеньев. Для шфференциалов с внешним зацеплением шестерен (рис. 5.7, а, б иг) это уравнение выражает второе свойство дифференциала (кинематическое) и имеет вид:
nа1+к nа2-(\ + к) nв= О,
где nа2 и nа2 — частоты вращения полуосевых (солнечных) шестерен дифференциала; nв - частота вращения корпуса дифференциала.
У симметричных дифференциалов (см. рис. 5.7,а и б) к = 1, так как Za2 = Za1. Тогда уравнение кинематики для них примет вид:
nа1,+nа2=2nв и (nа1 +nа2)/2=nв.
Из полученного выражения следует, что при изменении частоты вращения nа1 левой полуосевой шестерни автоматически изменяется частота вращения nа2 правой полуосевой шестерни (см. рис. 5.1,а).
При притормаживании одной из полуосевых шестерен начнут проворачиваться сателлиты и увеличиваться частота вращения второй полуосевой шестерни. При остановке одной из полуосевых шестерен частота вращения другой полуосевой шестерни увеличится в 2 раза. Так, при
nа1 = 0 nа2 = 2nв,
Таким образом, второе свойство дифференциала (кинематическое) позволяет левым и правым колесам трактора вращаться с разными угловыми скоростями при движении на поворотах и по неровностям пути. При этом частоты вращения левого и правого колес трактора кинематически связаны между собой.
Уравнение кинематики для несимметричного цилиндрического дифференциала с комбинированным зацеплением шестерен (рис. 5,7,в) имеет вид:
nа+ k nс - (1+k) nв =0,
где nа и nс — частота вращения соответственно солнечной и эпициклической шестерен дифференциала.
Простой симметричный конический дифференциал (см. рис. 5.2),состоит из корпуса 3, сателлитов 5, осей 2 вращения сателлитов, полуосевых шестерен 1 и 4. Ведущим звеном дифференциала является корпус 3, ведомыми - полуосевые шестерни 1 и 4. У простого симметричного дифференциала полуосевые шестерни 1 и 4 имеют одинаковое число зубьев.
При прямолинейном движении трактора полуосевые шестерни вращаются вместе с корпусом дифференциала. Сателлиты 5 при этом неподвижны относительно оси 2. При движении трактора по криволинейной траектории или по неровностям пути скорость вращения одной из полуосевых шестерен уменьшается, а другой пропорционально возрастает вследствие вращения сателлитов 5 относительно оси 2. В этой конструкции четыре сателлита, каждая пара которых устанавливается на свою ось вращения 2. Для смазывания оси 2 в месте посадки сателлитов имеют лыски или спиральные канавки, удерживающие масло.
В ряде конструкций простых симметричных дифференциалов (см. рис. 5.6) сателлиты устанавливают на шипы крестовины 11. При этом число шипов крестовины (три или четыре) равно числу сателлитов. На рис. 5.6 дифференциал имеет три сателлита.
Свойство дифференциала делить подводимый к его корпусу крутящий момент в определенной пропорции между ведомыми валами приводит в ряде случаев к потере проходимости трактора.
Вопрос 37
Рулевое управление предназначено для изменения направления движения автомобиля.
Рулевые управления колесных машин подразделяются по следующим основным классификационным признакам:
по способу поворота:
- управляемыми колесами
- управляемой осью
- складыванием звеньев
- бортовым поворотом (принудительным вращением ведущих колес одного борта с иной угловой скоростью, чем ведущих колес другого борта)
расположению места водителя:
- правое — при левостороннем движении
- левое — при правостороннем движении
Кроме того, для получившего наибольшее применение на автомобилях рулевого управления с управляемыми колесами (оно состоит из рулевого колеса, рулевого механизма, рулевого привода, а также часто и усилителя) выделяют классификацию рулевых механизмов и рулевых приводов.
Классификация рулевых механизмов:
по типу передачи:
- механический
- гидравлический (рулевой механизм или рулевое управление)
передаточному числу:
- изменяемое
- неизменяемое
- обратимости
- обратимый
- на пределе обратимости
Классификация рулевых приводов (рулевых трапеций):
по расположению:
- передняя — перед осью
- задняя — за осью
в зависимости от типа подвески:
- цельная (при зависимой подвеске)
- разрезная (при независимой подвеске)
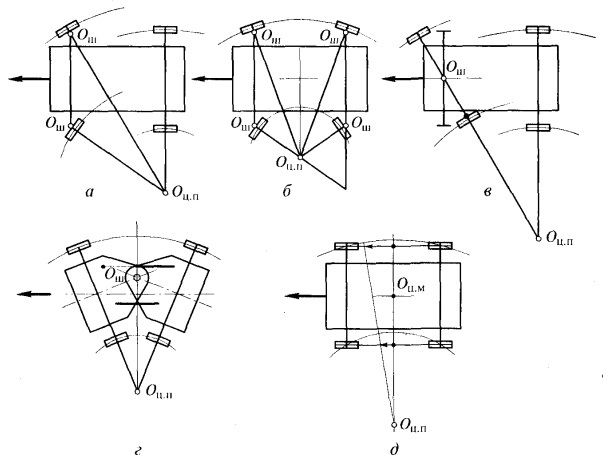
Рис. Схемы типовых способов поворота колесных машин:
а, б — управляемыми колесами; в — управляемой осью; г — складыванием звеньев; д — бортовой поворот; 0ш — ось шкворня; Оип — центр поворота. Оим — центр масс
Основные требования к рулевому управлению следующие:
- обеспечение высокой маневренности автомобиля;
- удобство и легкость управления, в том числе минимальная передача толчков ог дороги на рулевое колесо;
- соответствие радиуса поворота управляющему воздействию водителя;
- высокая надежность;
- минимальное боковое скольжение колес при повороте автомобиля;
- стабилизация повернутых управляемых колес;
- минимальные вибрации, в том числе отсутствие автоколебаний управляемых колес;
- кинематическая согласованность с подвеской.
Кроме того, к рулевым управлениям, как и к остальным механизмам и системам автомобиля, предъявляют также общие требования:
- обеспечение минимальных размеров и массы, высокая надежность (здесь она выделена отдельным пунктом, поскольку из механизмов и систем автомобиля рулевое управление и тормозное управление прежде всего влияют на безопасность движения);
- минимальное обслуживание;
- технологичность.
Рассмотрим, какими конструктивными мероприятиями обеспечивается выполнение требований к рулевым управлениям с управляемыми колесами.
Высокая маневренность (малый радиус поворота и малая ширина коридора) обеспечивается в основном уменьшением базы и увеличением угла поворота управляемых колес. Обычно минимальный радиус поворота легковых автомобилей составляет 4,5… 5,5 м, грузовых — 8… 12 м. Маневренность существенно улучшается, если, кроме передних управляемых колес, используются сше и задние управляемые колеса.
Удобство и легкость управления, как и для любого органа управления, определяются обычно удобным расположением органа управления (рулевого колеса), величиной его полного хода (который не должен превышать 5 оборотов от одного до другого крайнего положения), невысокими значениями усилия, необходимого для перемещения рулевого колеса. Обычно считается, что его усилие не должно превышать 100 Н для легковых автомобилей и 250 Н для грузовых. Удобство расположения определяется в частности соответствием расположения плоскости рулевого колеса посадке водителя.
Соответствие радиуса поворота управляющему воздействию водителя обеспечивается в основном использованием жесткой кинематической связи между управляемыми колесами и рулевым колесом. Кроме того, суммарный люфт рулевого колеса должен находиться в заданных минимальных значениях. При этом управляющее воздействие водителя не должно вызывать боковых скольжений управляемых и неуправляемых колес.
Высокая надежность рулевого управления обеспечивается в основном достаточно большими запасами по напряжениям в деталях рулевого управления. Применение дублирующих систем в рулевом управлении, как и в тормозном управлении, пока не представляется возможным.
Минимальное боковое скольжение колес при повороте автомобиля обеспечивается в основном применением рулевых трапеций в приводе управляемых колес, а при трех и более осях, кроме того, расположением осей, обеспечивающим минимальное боковое скольжение. Меньшая высота профиля и более широкий протектор шины уменьшают углы увода наружных колес при движении на повороте.
Стабилизация повернутых управляемых колес обеспечивается в основном при малых скоростях движения применением поперечного наклона оси шкворня, а при больших скоростях движения — упругостью шин и продольным наклоном оси шкворня.