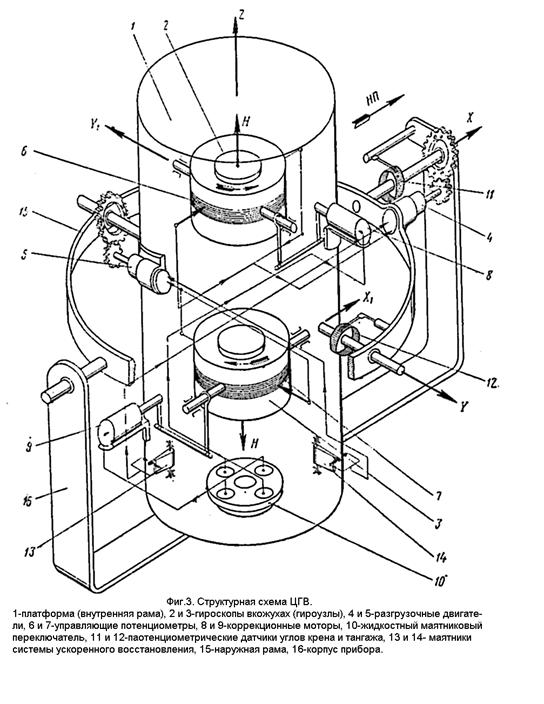
Структурная схема ЦГВ представлена на фиг. 3, а кинематическая схема, более близкая к конструкции, - на фиг. 4. Обозначения элементов на обеих фигурах идентичны.
Гиростабилизированная платформа 1, состоящая из двух гироскопов 2 и 3, коррекционных элементов 8, 9 и 10, разгрузочного двигателя 5, является внутренней рамой карданного подвеса.
Ось Z платформы 1 стабилизирована по направлению вертикали места и в дальнейшем тексте будет называться нормальной осью платформы.
Наружная рама 15 имеет возможность неограниченного поворота в корпусе 16 и 18 прибора; поворот платформы 1 вокруг оси Y ограничен в пределах ±70°.
Ось X наружной рамы направлена вдоль продольной оси летательного аппарата и с нее проводится съем сигналов углов крена; с внутренней оси Y производится съем сигналов углов тангажа. Оси карданного подвеса X и Y являются измерительными осями и съем сигналов, пропорциональных углам крена и тангажа летательного аппарата, осуществляется при помощи потенциометрических датчиков 11 и 12.
На платформе 1 расположены два гироскопа 2 и 3 с одинаковыми по величине и противоположно направленными кинематическими моментами Н. В исходном положении последние параллельны оси Z.
Гироскопы заключены в кожухи и вместе с ними имеют возможность поворачиваться на небольшие углы относительно осей X1 и Y1, называемых осями прецессии. В горизонтальном рабочем положении прибора оси прецессии соответственно параллельны измерительным осям карданного подвеса X и Y.
Для компенсации моментов трения в измерительных осях и других вредных моментов, действующих на платформу, в приборе имеется два разгрузочных двигателя 4 и 5.
Разгрузочный двигатель 4 укреплен на наружной раме карданного подвеса и связан через редуктор с корпусом прибора.
Разгрузочный двигатель 5 укреплен на платформе и связан через редуктор с наружной рамой.
На кожухе гироскопа 2 находится потенциометр 6, выдающий сигнал на разгрузочный двигатель 4, а на кожухе гироскопа 3 – аналогичный потенциометр 7, управляющий разгрузочным двигателем 5. Щетки потенциометров связаны с платформой.
Гироскоп 2 вместе с наружной рамой карданного подвеса и разгрузочным двигателем 4 образуют как бы систему одноосного стабилизатора, осуществляющего стабилизацию платформы 1 относительно оси X, а гироскоп 3 вместе с платформой и разгрузочным двигателем 5 образует систему одноосного стабилизатора, осуществляющего стабилизацию этой платформы относительно оси Y.
В целом платформа 1 оказывается стабилизированной в абсолютном пространстве и близка по своим свойствам к свободному гироскопу (при отключенной коррекции).
Рассмотрим действие системы разгрузки в приборе. В идеальном случае вокруг измерительных осей X и Y платформы не действуют возмущающие моменты; при этом оси собственного вращения гироскопов 2 и 3 устанавливаются вдоль оси Z платформы.
Предположим, что вокруг оси X наружной рамы карданного подвеса возник некоторый возмущающий момент М. Этот момент через подшипники оси Y платформы и подшипники оси Y1 гироскопа 2 воздействует на последний. Под действием момента М гироскоп 2 начинает прецессировать относительно оси Y1.
При этом возникает гироскопический момент, направленный по оси X наружной рамы и уравновешивающий в первое мгновение возмущающий момент М.
При отключении гироскопа 2 со щеток, связанных с потенциометром 6, снимается сигнал, пропорциональный углу отклонения гироскопа 2 от нулевого положения, соответствующего совпадению оси собственного вращения гироскопа H с осью платформы Z.
Сигнал поступает на разгрузочный двигатель 4, который развивает на оси наружной рамы карданного подвеса момент, противоположный возмущающему моменту М.
При наступлении равновесия между возмущающими и разгрузочным моментами прецессия гироскопа 2 прекращается и он остается отклоненным на некоторый угол вокруг прецессии Y1. При этом платформа 1 от действия момента М своего первоначального положения не меняет.
После того как действие момента М прекращается, гироскоп возвращается в нулевое положение под действием момента разгрузочного двигателя.
Аналогично работает система силовой разгрузки, состоящая из гироскопа 3 и разгрузочного двигателя 5, при воздействии на платформу возмущающих моментов вокруг оси Y.
Таким образом, платформа 1 при наличии в приборе силовой разгрузки сохраняет свое неизменное положение в пространстве при действии возмущающих моментов по измерительным осям.
Для придания оси Z гиростабилизированной платформы вертикального направления в приборе имеется система коррекции, состоящая из жидкостного маятникового переключателя 10 и двух коррекционных моторов 8 и 9. Коррекционный мотор 8 связан шарнирной передачей с осью кожуха гироскопа 2; коррекционный мотор 9 связан аналогичным образом с осью кожуха гироскопа 3.
Процесс коррекции в ЦГВ происходит аналогично действию коррекции в одногироскопных вертикалях, где коррекционный момент, приложенный, например, к оси внутренней рамы, вызывает прецессию гироскопа вокруг оси наружной рамы.
Ось прецессии Y1 для гироскопа 2 является как бы осью внутренней рамы, а измерительная ось Х платформы является для него осью наружной рамы. Аналогично для гироскопа 3 ось прецессии Х1 служит осью внутренней рамы, а измерительная ось платформы Y – осью наружной рамы.
Чувствительный элемент системы коррекции – жидкостный переключатель 10 представляет собой баллон с токопроводящей жидкостью и четырьмя электродами, расположенными в его основании крестообразно.
Баллон заполнен токопроводящей жидкостью неполностью, так что имеется воздушный пузырь. Жидкостный переключатель жестко связан с платформой, при этом в рабочем положении прибора электроды располагаются параллельно измерительным осям прибора. Пока ось Z платформы занимает положение вертикали, суммарный сигнал по каждой плоскости, выдаваемый жидкостным переключателем на коррекционные моторы, равен нулю.
При отклонении платформы на некоторый угол от вертикали, например вокруг оси Х, жидкостный переключатель выдает сигнал* на коррекционный мотор 8. Последний создает на оси кожуха гироскопа 2 момент, под действием которого платформа 1 прецессирует к вертикали вокруг оси Х.
Точно так же осуществляется коррекция платформы относительно оси Y тем же жидкостным переключателем 10 и коррекционным мотором 9.
Моменты трения в измерительных осях не препятствуют прецессионному движению платформы, так как они компенсируются разгрузочными двигателями.
В приборе предусмотрена возможность раздельного выключения поперечной и продольной коррекций с целью уменьшения погрешностей прибора при действии ускорений.
Для быстрого восстановления платформы 1 к вертикали (при запуске прибора) применяются механические маятники 13 и 14, расположенные на платформе. Каждый маятник работает только в одной плоскости и имеет контактное устройство.
При наклоне платформы, например вокруг оси Х, маятник 13 через свою контактную группу включает разгрузочный двигатель 4.
На разгрузочном двигателе суммируются два сигнала: сигнал с потенциометра 6 системы силовой разгрузки и сигнал с маятника 13 системы ускоренного восстановления.
Сигнал с маятника всегда превышает по величине сигнал с потенциометра силовой разгрузки и направлен противоположно ему.
Под действием суммарного момента разгрузочного двигателя 4 гироскоп 2 начинает прецессировать. Прецессия гироскопа не прекращается и после того, как гироскоп отклонится до положения, соответствующего максимальному сигналу, снимаемому с потенциометра 6. Гироскоп 2 продолжает прецессировать под действием избыточного момента от сигнала маятника до тех пор, пока он не ляжет на ограничивающий упор. При этом платформа практически потеряет свои гироскопические свойства относительно оси Х и под действием избыточного момента D М начнет ускоренно с угловой скоростью wх двигаться к вертикальному положению. На фиг. 5 изображены гироскопические моменты, действующие в процессе ускоренного восстановления платформы. Для удобства изображения гироскопы на платформе разнесены.
Одновременно с появлением угловой скорости wх возникает гироскопический момент МГ2=Н2wх у гироскопа 2, который воздействует на платформу относительно оси Y. Для гироскопа 3 этот момент – возмущающий. Он вызывает его прецессию относительно оси Х вслед за платформой с угловой скоростью
 (так как Н2=Н3).
(так как Н2=Н3).
Таким образом, гироскоп 3 оказывается как бы жестко связанным с платформой и ускоренно двигается вместе с ней относительно измерительной оси Х.
Гироскопические моменты гироскопов 2 и 3, которые возникают относительно измерительной оси Y платформы, взаимно компенсируются H2wx=H3wx вследствие того, что гироскопы вращаются в противоположных направлениях.
Благодаря компенсации гироскопических моментов разгрузочный двигатель не испытывает дополнительной нагрузки и обеспечивает плавное восстановление платформы к вертикали. Если бы гироскопы имели одинаковое направление вращения, то гироскопические моменты суммировались бы и не всегда могли быть скомпенсированы разгрузочным двигателем, а это вызвало бы рывки и неплавность в работе системы ускоренного восстановления.
Это обстоятельство послужило одной из причин для выбора противоположных направлений вращения гироскопов.
Платформа совершит несколько колебаний относительно вертикального положения и остановится.
Таким же образом происходит ускоренное восстановление платформы вокруг оси Y с помощью маятника 14 и разгрузочного двигателя 5.
Система ускоренного восстановления (или арретирование ЦГВ) приводит платформу 1 к вертикали с точностью ±(1,5-2)0 из любого положения. Дальнейшее точное восстановление платформы к вертикали осуществляется системой коррекции. Система ускоренного восстановления включается при запуске на 40-120 сек. – время, необходимое для набора оборотов гироскопами и восстановления платформы к вертикали. Особенность системы ускоренного восстановления ЦГВ заключается в приведении платформы к положению, близкому к вертикали (в условиях отсутствия ускорений), независимо от положения корпуса прибора.
ПЕРЕХОДНЫЕ РЕЖИМЫ
Полет летательного аппарата в переходных режимах (набор скорости, торможение, вираж и т.п.) сопровождается длительными или кратковременными ускорениями.
Жидкостный переключатель, как и любое другое маятниковое устройство, реагирует на ускорения.
При наличии ускорений жидкостный переключатель дает сигнал на систему коррекции, вследствие чего ось Z платформы прецессирует к новому положению равновесия, определяемому направлением равнодействующей силы тяжести и инерционных сил. При этом гировертикаль с включенной коррекцией накапливает погрешность со скоростью, в среднем равной 1 – 1,50 за каждую минуту действия ускорения.
При кратковременных ускорениях ось Z платформы из-за маленькой скорости прецессии и небольшого собственного ухода не успевает значительно отклониться от направления истинной вертикали и, следовательно, прибор не накапливает больших погрешностей*.
После прекращения действия ускорения ось Z платформы прецессирует к истинной вертикали приблизительно со скоростью прецессии от коррекции.
Для уменьшения погрешностей при действии длительных односторонних (режим набора скорости, вираж) в приборе предусматривается следующее:
1. Выключение поперечной коррекции – автоматически от центрального выключателя коррекции типа ВК-53РБ.
2. Возможность выключения продольной коррекции с помощью специальных устройств.
При выключенной коррекции прибор накапливает погрешность со скоростью собственного ухода, равной 0,2 – 0,3 град/мин. Величина этого ухода в режиме виража и рысканья может возрасти за счет увеличения моментов несбалансированности вокруг осей прецессии при действии линейных перегрузок и вследствие действия гироскопических моментов относительно тех же осей, возникающих при отклонениях осей собственного вращения гироскопов от нормальной оси Z платформы.