Порядок выполнения задания
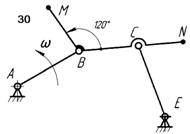
1. На рисунке механизм изображен в масштабе. Принимая длину звена АВ равной 40 см, определить размеры остальных звеньев. Построить в масштабе план механизма в указанном положении, определить масштабный коэффициент (например, μ l = lАВ / АВ).
2. На том же листе построить план скоростей, считая, что угловая скорость звена А В постоянна и равна ω1=2 рад/с. Определить скорости всех точек механизма, указанных буквами, и угловые скорости всех звеньев, указать масштабный коэффициент плана скоростей. Скорость одной из точек определить, используя метод подобия для плана скоростей.
Все необходимые вычисления выполнить на другом листе.
Показать на плане механизма направления скоростей точек механизма и направления вращения звеньев (угловых скоростей).
3. Повторить построение плана механизма в том же масштабе и построить план ускорений. Определить ускорения всех точек и угловые ускорения всех звеньев, указать масштабный коэффициент плана ускорений. Ускорение одной из точек определить, используя метод подобия для плана ускорений.
Все необходимые вычисления выполнить на другом листе.
Показать на плане механизма направления ускорений точек и направления угловых ускорений звеньев.
Пример выполнения задания
Задачу, связанную с нахождением скоростей и ускорений точек механизма, решают с помощью планов скоростей и ускорений. Изложим особенности этого решения на примере конкретного механизма.
Дано: кинематическая схема механизма (рис. 2.2); длины звеньев  угловая скорость входного звена
угловая скорость входного звена  ; угловая координата входного звена
; угловая координата входного звена  .
.
Определить: скорости и ускорения точек механизма, а также угловые скорости и ускорения звеньев в данный момент времени.
Решение
Для определения скоростей и ускорений точек механизма построим его план в масштабе KL, который вычислим по формуле
 (2.1)
(2.1)
где  – истинное значение длины звена в метрах;
– истинное значение длины звена в метрах;  – длина отрезка, изображающего кривошип на чертеже в миллиметрах.
– длина отрезка, изображающего кривошип на чертеже в миллиметрах.
Абсолютная скорость точки А (её вектор  перпендикулярен
перпендикулярен  ) определяется из выражения:
) определяется из выражения:
 (2.2)
(2.2)
Построим план скоростей механизма. При построении этого плана обратим внимание на то, что лучи, выходящие из его полюса, изображают абсолютные скорости точек звеньев механизма, а отрезки, соединяющие концы этих лучей – относительные скорости данных точек. Полюс плана скоростей обозначим буквой «р ». Для удобства план скоростей будем строить в масштабе условного кривошипа. Поэтому длину отрезка ра вектора скорости точки А кривошипа изобразим на плане скоростей (рис. 2.3) кратной длине кривошипа, отображенного на плане механизма. Длину ра определим из выражения  где К 1 – масштаб условных кривошипов (любое число). Тогда масштаб плана скоростей вычислим по формуле:
где К 1 – масштаб условных кривошипов (любое число). Тогда масштаб плана скоростей вычислим по формуле:
 (2.3)
(2.3)
Для определения скорости точки В запишем векторное уравнение:
 (2.4)
(2.4)
В уравнении (2.4) вектор  известен по величине и по направлению (подчеркнут двумя линиями), а векторы
известен по величине и по направлению (подчеркнут двумя линиями), а векторы  – только по направлению (подчеркнуты одной линией). Поэтому на плане скоростей можно показать только их направления. Так как вектор
– только по направлению (подчеркнуты одной линией). Поэтому на плане скоростей можно показать только их направления. Так как вектор  является абсолютной скоростью точки В третьего звена, то его направление следует проводить из полюса, а направление вектора
является абсолютной скоростью точки В третьего звена, то его направление следует проводить из полюса, а направление вектора  – из точки «а » плана скоростей.
– из точки «а » плана скоростей.
Точка пересечения двух указанных направлений определит искомые величины векторов:

Тогда
 (2.5)
(2.5)
Скорость тоски С 2, принадлежащей второму звену, определим из уравнения:
 (2.6)
(2.6)
где 
Анализируя уравнения (2.5) и (2.6) получим:
или через отрезки планов скоростей механизма
 . (2.7)
. (2.7)
Абсолютную скорость точки С 2 (рис. 2.2) определим по формуле: 
Из схемы механизма видно, что ползун 4 находится в сложном движении, поэтому абсолютная скорость точки С 4 определяется векторным равенством:
 (2.8)
(2.8)
Так как звенья 4 и 5 соединены шарнирно, то  Тогда
Тогда

 . (2.9)
. (2.9)
Заканчиваем построение плана скоростей, и из него находим

Тогда угловая скорость 5 звена
 (2.10)
(2.10)
Построим план ускорений. Особенности его построения такие же, как и особенности построения плана скоростей. Полюс плана ускорений обозначим буквой «π».
Абсолютное ускорение точки А можно представить векторным равенством
 (2.11)
(2.11)
Так как ω1= const, то  . Поэтому вектор
. Поэтому вектор  направлен параллельно звену 1 к центру вращения О 1 и по величине равен:
направлен параллельно звену 1 к центру вращения О 1 и по величине равен:
План ускорений строим в масштабе условных кривошипов К 2. Для этого вектор  откладываем на плане ускорений в виде отрезка
откладываем на плане ускорений в виде отрезка  , кратного длине кривошипа О 1 А на плане механизма (рис. 2.2). Тогда масштаб плана ускорений можно найти по формуле:
, кратного длине кривошипа О 1 А на плане механизма (рис. 2.2). Тогда масштаб плана ускорений можно найти по формуле:
 (2.12)
(2.12)
Для определения ускорения точки В можно записать уравнения:
 или
или
 (2.13)
(2.13)
В уравнении (2.13), как и в уравнении (2.4), векторы, известные по величине и направлению, подчеркнуты двумя линиями, а векторы, известные только по направлению, – одной линией. В этом уравнении
 и направлено от точки В к точке О 2;
и направлено от точки В к точке О 2;
 и направлено от точки В к точке А;
и направлено от точки В к точке А;  – неизвестны по величине, так как неизвестны угловые ускорения
– неизвестны по величине, так как неизвестны угловые ускорения 
Длины отрезков, изображающих на плане ускорений векторы  , определяются из выражений:
, определяются из выражений:
где (ab) и (pb) – отрезки на плане скоростей.
Построим план ускорений, используя уравнение (2.13). Из полюса π откладываем отрезок (π а) (рис. 2.6), изображающий в масштабе условных кривошипов К 2 ускорение  . Затем из конца этого вектора проводим отрезок nba, а из конца последнего – прямую по направлению вектора тангенциального ускорения
. Затем из конца этого вектора проводим отрезок nba, а из конца последнего – прямую по направлению вектора тангенциального ускорения  Далее из полюса π откладываем отрезок nb и из конца этого отрезка проводим прямую по направлению тангенциального ускорения
Далее из полюса π откладываем отрезок nb и из конца этого отрезка проводим прямую по направлению тангенциального ускорения 
Пересечение двух прямых известных направлений векторов в точке b определит их искомые величины. Тогда:
 (2.14)
(2.14)
Ускорение точки С 2 можно определить, решив уравнение:
 (2.15)
(2.15)
Модуль ускорения  можно найти из соотношения:
можно найти из соотношения:
Тогда по рис. 2.6: 
Перейдем к определению ускорений точек С 4 и С 5. Ускорение точки С 4 можно найти, решив векторное уравнение:
 (2.16)
(2.16)
Величина ускорения Кориолиса определяется по формуле:

где ω2 – угловая скорость переносного движения;

Согласно известному правилу, определим направление ускорения Кориолиса (рис. 2.7):
Отрезок  , изображающий на плане ускорений вектор
, изображающий на плане ускорений вектор  , можно вычислить по формуле:
, можно вычислить по формуле:
где (ab) и ( ) – отрезки плана скоростей.
) – отрезки плана скоростей.
Относительное ускорение  || АВ.
|| АВ.
Для определения ускорения точки С 5 составим векторное уравнение:
 (2.17)
(2.17)
В этом уравнении  || С 5 О 3 – направлено от точки С к точке О 3;
|| С 5 О 3 – направлено от точки С к точке О 3;  – неизвестно по величине, так как неизвестно
– неизвестно по величине, так как неизвестно  . Отрезок
. Отрезок  , изображающий на плане ускорений
, изображающий на плане ускорений  можно вычислить по формуле:
можно вычислить по формуле:
Так как точки С 4 и С 5 совпадают, то  Тогда, приравняв правые части векторных уравнений (2.16) и (2.17), можно записать:
Тогда, приравняв правые части векторных уравнений (2.16) и (2.17), можно записать:
 (2.1 8)
(2.1 8)
 || АВ || СО 3
|| АВ || СО 3 
Заканчиваем построение плана ускорений (рис. 2.8). Для этого из точки с 2 проведем отрезок  , а из его конца прямую по направлению вектора . Отрезок
, а из его конца прямую по направлению вектора . Отрезок  проведем из полюса π, а из конца этого отрезка – прямую по направлению вектора
проведем из полюса π, а из конца этого отрезка – прямую по направлению вектора  Пересечение двух прямых в точке С 4 (С 5) определит следующие искомые величины:
Пересечение двух прямых в точке С 4 (С 5) определит следующие искомые величины:
 (2.19)
(2.19)
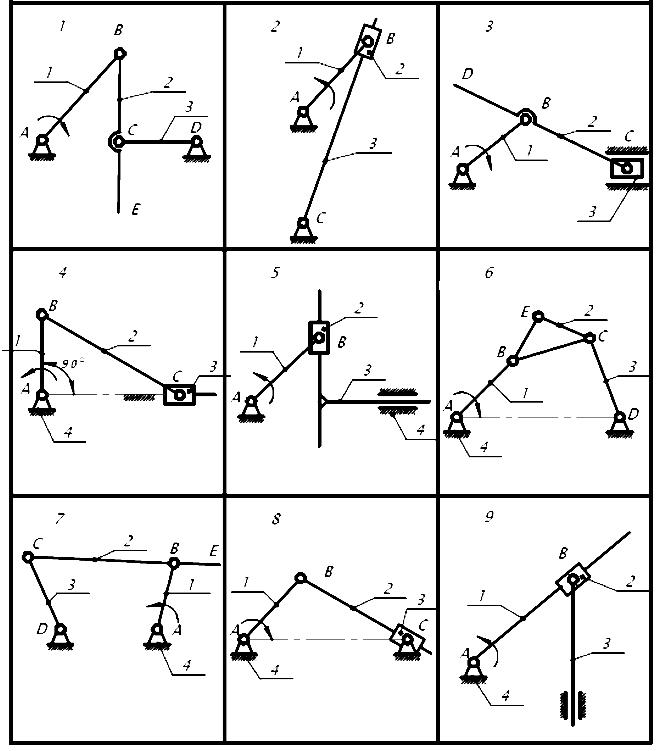
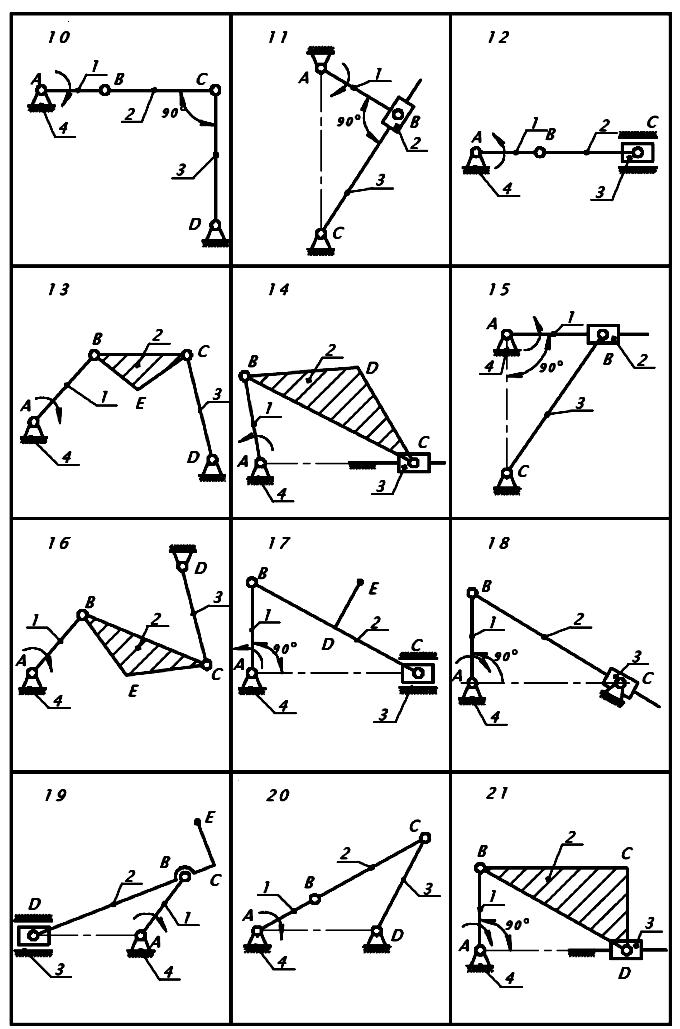
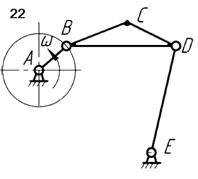
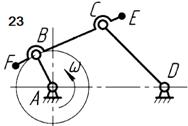
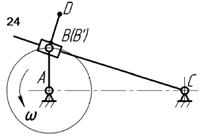
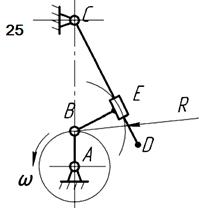
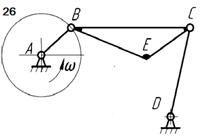
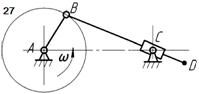
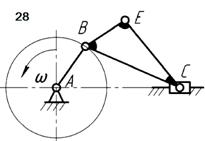
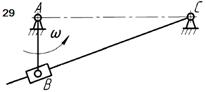
Схемы механизмов
| 
| 
|
| 
| 
|
| 
| 
|