Система спутниковой навигации GPS – принципы работы
Спутниковая навигация GPS, одна из глобальных навигационных спутниковых систем (ГНСС), давно уже является стандартом для создания систем позиционирования и активно применяется в различных устройствах, трекерах и навигаторах.
GPS – это спутниковая навигационная система, разработанная Министерством обороны США, которая определяет точные координаты и время. Работает в любой точке Земли. GPS состоит из трех частей – спутников, станций на Земле и приемников сигнала.
История GPS
Идея создания спутниковой навигационной системы зародилась еще в 50-е годы прошлого столетия. Американская группа ученых, наблюдающая за запуском советских спутников, заметила, что при приближении спутника частота сигнала увеличивается и уменьшается при его отдалении. Это позволило понять, что возможно измерить положение и скорость спутника, зная свои координаты на Земле, и наоборот. Огромную роль в развитии навигационной системы сыграл запуск спутников на низкую околоземную орбиту. А в 1973 году была создана программа «DNSS» («NavStar»), по этой программе спутники запускались на среднюю околоземную орбиту. Название GPS программа получила в том же 1973 году.
Система GPS на данный момент используется как в военной области, так и в гражданских целях. Сфер применения GPS много:
· Мобильная связь;
· Тектоника плит – происходит слежение за колебаниями плит;
· Определение сейсмической активности;
· Спутниковое отслеживание транспорта – можно проводить мониторинг за положением, скоростью транспорта и контролировать их движение;
· Геодезия – определение точных границ земельных участков;
· Картография;
· Навигация;
· Игры, геотегинт и прочие развлекательные области.
Важнейшим недостатком системы можно считать невозможность получения сигнала при определенных условиях. Рабочие частоты GPS лежат в дециметровом диапазоне волн. Это приводит к тому, что уровень сигнала может снизиться из-за высокой облачности, плотной листвы деревьев. Радиоисточники, радиопомехи, а в редких случаях даже магнитные бури также могут мешать нормальной передаче сигнала. Точность определения данных будет ухудшаться в приполярных районах, так как спутники невысоко поднимаются над горизонтом.
 Орбиты спутников системы GPS. Пример видимости спутников из одной из точек на поверхности Земли. Visible sat — это число спутников, видимых над горизонтом наблюдателя в идеальных условиях (чистое поле)
Орбиты спутников системы GPS. Пример видимости спутников из одной из точек на поверхности Земли. Visible sat — это число спутников, видимых над горизонтом наблюдателя в идеальных условиях (чистое поле)
ГЛОНАСС
 Основным конкурентом GPS является российская система ГЛОНАСС (глобальная навигационная спутниковая система). Свою полноценную работу система начала с 2010 года, попытки активно использовать ее предпринимались с 1995 года. Существует несколько отличий между двумя системами:
Основным конкурентом GPS является российская система ГЛОНАСС (глобальная навигационная спутниковая система). Свою полноценную работу система начала с 2010 года, попытки активно использовать ее предпринимались с 1995 года. Существует несколько отличий между двумя системами:
· Разные кодировки – американцы используют CDMA, для российской системы используется FDMA;
· Разные габариты устройств – ГЛОНАСС использует более сложную модель, поэтому повышается энергопотребление и размеры устройств;
· Расстановка и движение спутников на орбите – российская система обеспечивает более широкий охват территории и более точное определение координат и времени.
· Срок службы спутников – американские спутники имеют более высокий эксплуатационный ресурс, поэтому они служат дольше.
Сегодня на орбите работают 24 спутника ГЛОНАСС, они охватывают навигационным сигналом весь земной шар. Новейшие потребительские устройства используют GPS и ГЛОНАСС как взаимодополняющие системы, подключаясь к ближайшим найденным спутникам, это значительно увеличивает скорость и точность их работы.
Помимо ГЛОНАСС и GPS существуют и другие менее популярные навигационные системы – европейский Galileo и китайский Beidou.
Galileo
 Галилео — совместный проект Европейского союза и Европейского космического агентства, анонсированный в 2002 году. Ожидалось, что «Галилео» войдёт в строй в 2014—2016 годах, когда на орбиту будут выведены все 30 запланированных спутников (24 операционных и 6 резервных). Но на 2018 год спутниковая группировка «Галилео» так и не достигла необходимого количества аппаратов. Считается, что полнофункциональное использование системы начнется не ранее 2020 года.
Галилео — совместный проект Европейского союза и Европейского космического агентства, анонсированный в 2002 году. Ожидалось, что «Галилео» войдёт в строй в 2014—2016 годах, когда на орбиту будут выведены все 30 запланированных спутников (24 операционных и 6 резервных). Но на 2018 год спутниковая группировка «Галилео» так и не достигла необходимого количества аппаратов. Считается, что полнофункциональное использование системы начнется не ранее 2020 года.
Compass
 Это следующая ступень развития китайской региональной навигационной системы Beidou, которая была введена в эксплуатацию после запуска 10 спутников в конце 2011 года. Сейчас она обеспечивает покрытие в границах Азии и Тихоокеанского региона, но, как ожидается, к 2020 году система станет глобальной.
Это следующая ступень развития китайской региональной навигационной системы Beidou, которая была введена в эксплуатацию после запуска 10 спутников в конце 2011 года. Сейчас она обеспечивает покрытие в границах Азии и Тихоокеанского региона, но, как ожидается, к 2020 году система станет глобальной.
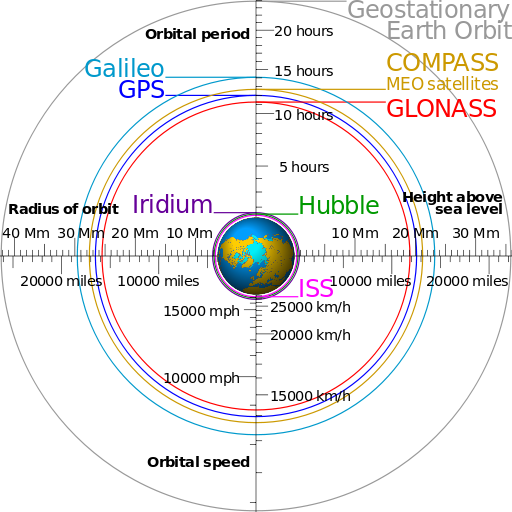
Сравнение орбит спутниковых навигационных систем GPS, ГЛОНАСС, Galileo и Compass (средняя околоземная орбита — MEO) с орбитами Международной космической станции (МКС), телескопа Хаббл и серии спутников Иридиум (Iridium) на низкой орбите, а также геостационарной орбиты и номинального размера Земли.
Принцип работы GPS
Работает система GPS следующим образом – приемник сигнала измеряет задержку распространения сигнала от спутника до приемника. Из полученного сигнала приемник получает данные о местонахождении спутника. Для определения расстояния от спутника до приемника задержка сигнала умножается на скорость света. С точки зрения геометрии работу навигационной системы можно проиллюстрировать так: несколько сфер, в середине которых находятся спутники, пересекаются и в них находится пользователь. Радиус каждой из сфер соответственно равен расстоянию до этого видимого спутника. Сигналы от трех спутников позволяют получить данные о широте и долготе, четвертый спутник дает информацию о высоте объекта над поверхностью. Полученные значения можно свести в систему уравнений, из которых можно найти координату пользователя. Таким образом, для получения точного местоположения необходимо провести 4 измерения дальностей до спутника (если исключить неправдоподобные результаты, достаточно трех измерений).

Поправки в полученные уравнения вносит расхождение между расчетным и фактическим положением спутника. Погрешность, которая возникает в результате этого, называется эфемеридной и составляет от 1 до 5 метров. Также свой вклад вносят интерференция, атмосферное давление, влажность, температура, влияние ионосферы и атмосферы. Суммарно совокупность всех ошибок может довести погрешность до 100 метров. Некоторые ошибки можно устранить математически.
Чтобы уменьшить все погрешности, используют дифференциальный режим GPS. В нем приемник получает по радиоканалу все необходимые поправки к координатам от базовой станции. Итоговая точность измерения достигает 1-5 метров. При дифференциальном режиме существует 2 метода корректировки полученных данных – это коррекция самих координат и коррекция навигационных параметров. Первый метод использовать неудобно, так как все пользователи должны работать по одним и тем же спутникам. Во втором случае значительно увеличивается сложность самой аппаратуры для определения местоположения.
Существует новый класс систем, который увеличивает точность измерения до 1 см. Огромное влияние на точность оказывает угол между направлениями на спутники. При большом угле местоположение будет определяться с большей точностью.
Точность измерения может быть искусственно снижена Министерством обороны США. Для этого на устройствах навигации устанавливается специальный режим S/A – ограниченный доступ. Режим разработан в военных целях, чтобы не дать противнику преимущества в определении точных координат. С мая 2000 года режим ограниченного доступа был отменен.
Все источники ошибок можно разделить на несколько групп:
· Погрешность в вычислении орбит;
· Ошибки, связанные с приемником;
· Ошибки, связанные с многократным отражением сигнала от препятствий;
· Ионосфера, тропосферные задержки сигнала;
· Геометрия расположения спутников.
Основные характеристики GPS
В систему GPS входит 26 искусственных спутника Земли, сеть наземных станций слежения и навигационные приемники. Станции наблюдения требуются для определения и контроля параметров орбит, вычисления баллистических характеристик, регулировка отклонения от траекторий движения, контроль аппаратуры на бору космических аппаратов.
Характеристики навигационных систем GPS:
· Количество спутников – 26, 21 основной, 5 запасных;
· Количество орбитальных плоскостей – 6;
· Высота орбиты – 20000 км;
· Срок эксплуатации спутников – 7,5 лет;
· Рабочие частоты – L1=1575,42 МГц; L2=12275,6МГц, мощность 50 Вт и 8 Вт соответственно;
· Надежность навигационного определения – 95%.
Навигационные приемники
Поддержка технологи глобальных навигационных спутниковых систем (ГНСС) в электронных устройствах реализуется на базе навигационных приемников, которые могут быть выполнены в различных вариантах:
· Smart Antenna — модуль, состоящий из керамической антенны и навигационного приемника. Преимущества: компактность, не требует согласования, удешевляет разработку за счет сокращения сроков.
· MCM (Multi Chip Module) — чип, включающий все компоненты навигационного приемника.
· OEM — экранированная плата, включающая ВЧ интерфейсный процессор и процессор частот основной полосы (RF-frontend + baseband), SAW-фильтры и обвязку. Это наиболее популярное решение на данный момент.
Навигационный модуль подключается к микроконтроллеру или системе на кристалле по интерфейсу UART/RS-232 или USB.
Ключевые параметры навигационных приемников
Прежде чем навигационный приемник сможет выдавать информацию о местоположении, он должен обладать тремя наборами данных:
1. Сигналы от спутников
2. Альманах — информация о приблизительных параметрах орбит всех спутников, а также данные для калибровки часов и характеристики ионосферы
3. Эфемериды — точные параметры орбит и часов каждого спутника
Характеристика TTFF показывает сколько времени требуется приемнику на поиск сигналов от спутников и определение местоположения. Если приёмник новый, или был выключен на протяжении длительного периода, или был перевезен на большое расстояние с момента последнего включения, время до получения набора необходимых данных и определения места увеличивается.
Производители приемников используют различные методы уменьшения TTFF, включая скачивание и сохранения альманаха и эфемерид по беспроводным сетям передачи данных (т.н. метод Assisted GPS или A-GPS), это быстрее чем извлечение этих данных из сигналов ГНСС.
Навигационные приемники бывают нескольких типов – портативные, стационарные и авиационные. Приемники также характеризуются рядом параметров:
· Количество каналов – в современных приемников используется от 12 до 20 каналов;
· Тип антенны;
· Наличие картографической поддержки;
· Тип дисплея;
· Дополнительные функции;
· Различные технические характеристики – материалы, прочность, защита от влаги, чувствительность, объем памяти и другие.
Принцип действия самого навигатора – в первую очередь устройство пытается связаться с навигационным спутником. Как только связь будет установлена, происходит передача альманаха, то есть информации об орбитах спутников, находящихся в рамках одной навигационной системы. Связи с одним только спутником недостаточно для получения точного местоположения, поэтому оставшиеся спутники передают навигатору свои эфемериды, необходимые для определения отклонений, коэффициентов возмущения и других параметров.
Холодный, теплый и горячий старт GPS навигатора
Включив навигатор впервые или после долгого перерыва, начинается долгое ожидание для получения данных. Долгое время ожидания связано с тем, что в памяти навигатора отсутствуют либо устарели альманах и эфемериды, поэтому устройство должно выполнить ряд действий по получению или обновлению данных. Время ожидания, или так называемое время холодного старта, зависит от различных показателей – качество приемника, состояние атмосферы, шумы, количество спутников в зоне видимости.
Чтобы начать свою работу, навигатор должен:
· Найти спутник и установить с ним связь;
· Получить альманах и сохранить его в памяти;
· Получить эфемериды от спутника и сохранить их;
· Найти еще три спутника и установить с ними связь, получить от них эфемериды;
· Вычислить координаты при помощи эфемерид и местоположения спутников.
Только пройдя весь этот цикл, устройство начнет работать. Такой запуск и называется холодным стартом.
Горячий старт значительно отличается от холодного. В памяти навигатора уже имеется актуальный на данный момент альманах и эфемериды. Данные для альманаха действительны в течение 30 дней, эфемерид – в течение 30 минут. Из этого следует, что устройство выключалось на непродолжительное время. При горячем старте алгоритм будет проще – устройство устанавливает связь со спутником, при необходимости обновляет эфемериды и вычисляет местоположение.
Существует теплый старт – в этом случае альманах является актуальным, а эфемериды нужно обновить. Времени на это затрачивается немного больше, чем на горячий старт, но значительно меньше, чем на холодный.
Одним из ключевых параметров навигационных модулей в мобильных устройствах является энергопотребление. В зависимости от режима работы модуль потребляет различное количество энергии. Фаза поиска спутников (TTFF) характеризуется большим, а слежение меньшим энергопотреблением. Также производители реализуют различные схемы уменьшения энергопотребления, например, путем периодического перевода модуля в режим сна.
Как правило, все модули выдают данные по текстовому протоколу NMEA-0183, но кроме указанного текстового протокола каждый производитель имеет свой собственный двоичный протокол (Binary), который позволяет изменять конфигурацию модуля под конкретное использование либо получать доступ к дополнительному функционалу, а также доступ к сырым измерениям. Двоичный протокол удобен для использования на микроконтроллерах, т.к. при этом нет необходимости выполнять преобразование из текста в двоичные данные, тем самым экономя программную память путем исключения библиотеки работы со строками и времени на преобразование.
Стандарт NMEA-2000 — это развитие протокола NMEA-0183. В качестве физического уровня в NMEA-2000 используется CAN-шина, которая была выбрана в виду большей защищенности по сравнению с RS-232. С точки зрения протокола передачи данныхNMEA-2000 существенно отличается от своего предшественника, т.к. использует двоичный протокол, базирующийся на стандарте SAE J1939.
Частота обновления данных о местоположении и скорости всех модулей составляет 1 Гц, но при необходимости ее можно поднять до 5 или 10 Гц.
В зависимости от области применения модуль можно сконфигурировать под определенные динамические характеристики, которые он должен отслеживать (например, максимальное ускорение объекта). Это позволяет использовать оптимальный алгоритм и улучшать качество измерений.
Для выполнения навигационной задачи модуль должен одновременно принимать сигналы от нескольких спутников, т.е. иметь несколько приемных каналов. На сегодняшний день это число лежит в диапазоне от 12 до 88.

Точность определения местоположения по GPS составляет в среднем 15 м, она обусловлена используемым неточным сигналом, влиянием атмосферы на распространение радиосигнала, качеством кварцевых генераторов в приемниках и пр. Но с помощью корректирующих методов возможно улучшить точность определения местоположения. Эта технология называется Differential GPS. Существует два метода коррекции: наземный и спутниковый DGPS.
В наземных методах коррекции наземные станции дифференциальных поправок постоянно сверяют свое заведомо известное местоположение и сигналы от навигационных спутников. На базе этой информации вычисляются корректирующие величины, которые могут быть переданы с помощью УКВ- или ДВ-передатчика на мобильные DGPS-приемники в формате RTCM. На основании полученной информации потребитель может корректировать процесс определения собственного местоположения. Точность этого метода составляет 1—3 метра и зависит от расстояния до передатчика корректирующей информации и качества сигнала.
Спутниковые методы, такие как система WAAS (Wide Area Augmentation System), доступная в Северной Америке, и система EGNOS (European Geostationary Navigation Overlay System), доступная в Европе, шлют корректирующие данные с геостационарных спутников, таким образом достигается б о льшая область приема, чем при наземных методах.

Спутниковые системы дифференциальной коррекции (SBAS — Space Based Augmentation Systems) позволяют улучшить точность, надежность и доступность навигационной системы за счет интеграции внешних данных в процессе расчета

Демонстрация принципа работы системы WAAS (Wide Area Augmentation System) на территории США
Одним из основных параметров, влияющих на точность определения местоположения и стабильность приема является чувствительность. Она, как правило, определяется качеством малошумящего усилителя на входе приемника и сложностью реализованных алгоритмов цифровой обработки. Типовые значения современных приемников лежат в диапазоне 143 дБм для поиска и 160 дБм для слежения.
Кроме определения местоположения ГНСС предоставляют информацию о точном времени. Как правило, все приемники имеют выход PPS (pulse per second, импульсов в секунду) — секундная метка (1 Гц), которая точно синхронизирована с временной шкалой UTC.
Ограничения на покупку и использование модулей GPS
Российское законодательство требует от производителей уменьшать точность определения приемников. Работать с незагрубленной точностью может производиться только при наличии у пользователя специализированной лицензии.
Под запретом в Российской Федерации находятся специальные технические средства, предназначенные для негласного получения информации (СТС НПИ). К таковым относятся GPS трекеры, которые используются для негласного контроля над перемещением транспорта и прочих объектов. Основной признак незаконного технического средства – его скрытность. Поэтому перед приобретением устройства нужно внимательно изучить его характеристики, внешний вид, на наличие скрытых функций, а также просмотреть необходимые сертификаты соответствия. Также важно, в каком виде продается устройство. В разобранном виде прибор может не относиться к СТС НПИ. Но при сборе готовое устройство уже может относиться к запрещенным.
Дополнительные функции навигационных устройств
Счисление пути. На основе информации о направлении движения и пройденном пути (предоставляется дополнительными датчиками) приемник может рассчитывать свои координаты при отсутствии сигналов от спутников (например, в туннелях, на подземных стоянках и в плотной городской застройке).
Некоторые модули имеют возможность напрямую подключать флэш-память (например, по SPI) к модулю для записи трека c необходимой периодичностью. Эта функция позволяет отказаться от использования отдельного микроконтроллера, либо она может быть полезной для минимизации энергопотребления (т.е. система на кристалле может находиться в состоянии сна).