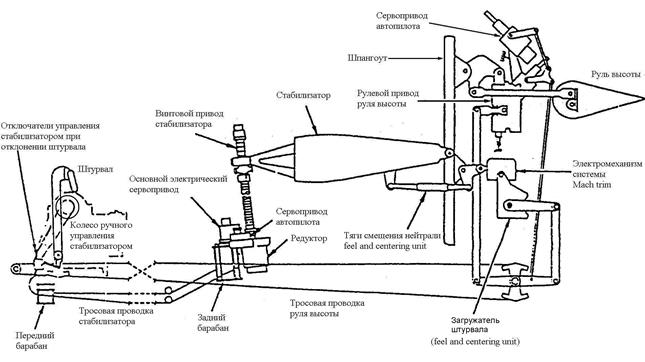
Стабилизатор управляется электродвигателями триммирования: один из них управляется вручную от переключателей на штурвалах, второй - от автопилота. На NG электродвигатель один, а управляется он от штурвала или автопилотом по независимым каналам.
Также обеспечена механическая связь со стабилизатором с помощью колеса управления и тросовой проводки. На случай заклинивания любого из электродвигателей предусмотрена муфта, разъединяющая проводку управления стабилизатором от электродвигателей. Чтобы сработала муфта, надо приложить усилие к колесу управления и сделать примерно пол-оборота.
Полный ход стабилизатора 0 - 17 units (-0.2 – 16.9 на NG). Он возможен только от механической системы управления.
Диапазон работы автопилота ограничен 0,25 – 14 units (0.05 – 14.5 на NG).
Управление от переключателей на штурвале еще более ограничено: 0,25 – 12,5 (0.05 – 14.5 на NG) при выпущенных закрылках и 2,5 – 12,5 (3.95 – 14.5 на NG) при убранных.
Диапазон 2 – 6,9 units (Green band) соответствует эксплуатационному диапазону центровок, соответственно 30% - 5% САХ. На NG этот диапазон 2,65 – 8,5 units, соответственно для центровок 36% - 6% САХ. При положении стабилизатора вне данного диапазона при переводе РУД на взлетный режим будет звучать прерывистый звуковой сигнал (Takeoff configuration warning).
Управление электродвигателем ручного триммирования выполняется от нажимных переключателей на штурвалах пилотов. Один из переключателей отвечает за направление триммирования, а второй включает питание электродвигателя.
Нажатие этих переключателей при подключенном автопилоте приводит к его отключению.
При отклонении штурвальной колонки от нейтрали срабатывают выключатели, прерывающие цепь управления стабилизатором в сторону противоположную отклонению. Например, при взятии штурвала на себя невозможно отклонить стабилизатор на пикирование. Чтобы отключить данное ограничение на центральном пульте есть выключатель «OVERRIDE». Его нужно использовать при заклинении проводки рулём высоты, чтобы управлять самолётом по тангажу с помощью только одного стабилизатора.
|
|
Скорость перекладки стабилизатора зависит от положения закрылков - при их выпуске увеличивается в три раза.
Автопилот управляет стабилизатором с помощью сервопривода автопилота. Скорость перекладки также зависит от положения закрылков. При выпущенных закрылках она равна скорости ручной перекладки с убранными закрылками, а при убранных – в два раза меньше.
При постановке самолёта на стоянку на длительный период следует стабилизатор отработать полностью на пикирование. В зимний период это связано с предотвращением затекания противообледенительной жидкости и растаявшего снега/слякоти в полости балансировочных панелей руля высоты. В остальной период это имеет смысл для предотвращения подъёма передней стойки самолёта на стоянке от порыва встречного ветра (особенно пустого, незаправленого самолёта).
Ниже приведён график зависимости силы ветра, способного опрокинуть самолёт на хвост в зависимости от положения стабилизатора, а также пунктирными линиями показана сила ветра, приводящая к смещению самолёта.

Система улучшения устойчивости по скорости на малых скоростях
(Speed Trim System)
Данная система является встроенной функцией цифровой системы управления самолетом (DFCS) и работает только при отключенном автопилоте.
|
|
Система управляет стабилизатором с помощью сервопривода автопилота для обеспечения устойчивости по скорости. Её срабатывание возможно вскоре после взлета или при уходе на второй круг. Условиями, способствующими срабатыванию, являются малый вес, задняя центровка и высокий режим работы двигателей.
См. (https://aviacom.ucoz.ru/Principleflight2.doc) стр. 17-18, 23
Система улучшения устойчивости по скорости применяется в области полетов на скоростях 90 – 250 узлов. Если компьютер улавливает изменение скорости, то система автоматически включается при выпущенных закрылках (на 400/500 независимо от закрылков), оборотах двигателей N1 более 60%. При этом должно пройти более 5 секунд после предыдущего ручного триммирования и не менее 10 секунд после отрыва от ВПП.
Принцип работы заключается в перекладывании стабилизатора в зависимости от изменения скорости самолета, таким образом, чтобы при разгоне самолет имел тенденцию к задиранию носа и наоборот. (При разгоне 90 – 250 узлов стабилизатор автоматически перекладывается на 8 градусов на кабрирование). Кроме изменений скорости компьютер учитывает обороты двигателей, вертикальную скорость и приближение к сваливанию. Чем выше режим двигателей, тем быстрее начнет срабатывать система. Чем больше вертикальная скорость набора высоты, тем больше стабилизатор отрабатывает на пикирование. При приближении к углам сваливания система автоматически отключается.
При торможении самолёта стабилизатор автоматически перекладывается на пикирование.
|
|
Система двухканальная. При отказе одного канала полет разрешается. При двойном отказе вылетать нельзя. Если двойной отказ произошел в полете, QRH не требует никаких действий, но логично было бы повысить контроль за скоростью на этапах захода на посадку и ухода на второй круг.
21 мая 2009 года AAIB (Air Accidents Investigation Branch) - бюро расследований происшествий на авиационном транспорте Великобритании опубликовало отчет о расследовании инцидента с Боингом 737-300 авиакомпании Thomsonfly, произошедшего в Bournemouth (Великобритания) 23 сентября 2007 года.
Согласно отчета, самолет при заходе на посадку потерял скорость до 82 узлов (20 узлов менее VREF), вышел на режим сваливания. Экипаж при выводе самолета из сваливания вывели двигатели на режим превышающий полную взлетную мощность. При этом, кабрирующий момент от двигателей был так велик, что для его парирования не хватило полной отдачи штурвальной колонки от себя и тангаж самолета увеличился до 44 градусов.
AAIB подчеркнуло в своем отчете, что в QRH (Quick Reference Handbook) не отражен тот факт, что для вывода самолета из сваливания может потребоваться использование стабилизатора для противодействия кабрирующему моменту двигателей и что экипажи должны быть предупреждены об этом.
Путевое управление
Путевое управление самолетом обеспечивается рулем направления. Перемещения педалей управления по тросовой проводке передаются на вертикально расположенную трубу (torque tube) в киле самолета. Вращение этой трубы через тяги связи передается на главный рулевой привод (main PCU) и резервный рулевой привод (standby PCU). К этой же трубе снизу прикреплен загружатель педалей (feel and centering unit), который имитирует аэродинамическую нагрузку на педалях и обеспечивает фиксированное положение руля направления при работе рулевого привода.
На руле отсутствует сервокомпенсатор, то есть отклонять руль направления в полете мускульным усилием практически невозможно.
Главный рулевой привод работает от гидросистем А и В. Резервный привод питается от резервной (standby) гидросистемы. Работа любой из трех гидросистем полностью обеспечивает путевое управление.
В главный рулевой привод встроен исполнительный механизм демпфера рысканья. (см. Боковая устойчивость и управляемость.) Он запитан от гидросистемы В.
Триммирование руля направления с помощью ручки на центральном пульте осуществляется смещением нейтрали механизма триммерного эффекта. Там же находится шкала с указателем отклонения руля направления в units.
На самолетах серии 300-500 производилась модификация схемы управления рулем направления (RSEP modification). RSEP –Rudder System Enhancement Program. Внешний признак выполнения данной модификации – дополнительное табло «STBY RUD ON» в левом верхнем углу панели FLIGHT CONTROL.
Модификация должна быть выполнена на всех самолетах до ноября 2008 года. Причиной явились две катастрофы и инцидент, в которых предположительной причиной назван отказ рулевого привода руля направления.
Первая катастрофа произошла 3 марта 1991 года с Боингом 737-200 в районе города Colorado Springs в США. (Источник информации: NATIONAL TRANSPORTATION SAFETY BOARD
WASHINGTON, D.C. 20594 AIRCRAFT ACCIDENT REPORT)
За 6 дней до катастрофы на этом самолете в полете возникло правое скольжение, которое экипаж устранил, выключив демпфер рыскания. Техсостав провел работы по демпферу, но скольжение повторилось через два дня снова. Опять демпфер был выключен и на земле были выполнены работы. В дальнейших полетах, вплоть до катастрофы, замечаний не было.
3 марта в 9.37 утра второй пилот доложила, что полосу наблюдает, и получила разрешение на визуальный заход на полосу 35. Ветер был 320 градусов 16 порывы 29 узлов. Также диспетчер доложил, что предшествующий борт докладывал о сдвиге ветра на глиссаде.
В 9.41 диспетчер дал команду после посадки не пересекать полосу 30, которая занята взлетающими бортами. Второй пилот подтвердила прием информации. Это была последняя передача экипажа.
В процессе разворота на посадочный с креном 20 градусов второй пилот доложила «1000 футов». В последующие 4 секунды темп разворота резко усилился. Она сказала «О, бог», тяга двигателей стала возрастать, поступила команда командира «Закрылки 15», что говорило о попытке уйти на второй круг.
Тем не менее, вращение продолжалось, скорость выросла до 200 узлов и перегрузка до 4. При столкновении самолет пикировал с углом тангажа 80 градусов.
Вторая катастрофа произошла 8 сентября 1994 года с Боингом 737-300 в районе города Aliquippa в США.
Инцидент произошел 9 июня 1996 года в районе города Richmond в США.
Предположительной причиной этих происшествий был самопроизвольный уход руля направления в крайнее положение. Это приводило к неконтролируемому кренению самолёта.
Главный рулевой привод руля направления до модификации RSEP имел двойной золотник (внутренний и внешний). Если они были слишком плотно подогнаны и имели значительное трение между собой, а пилот, по каким – либо причинам, допускал резкое движение педалями, то золотник мог уйти в крайнее положение и, соответственно, открыть путь гидрожидкости к полному неконтролируемому отклонению руля.

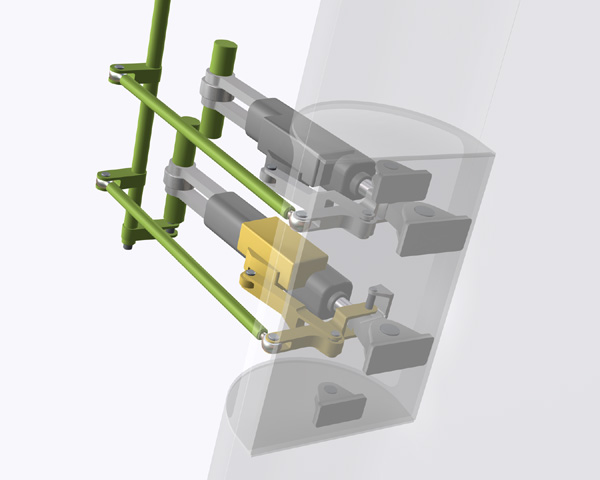
После модификации RSEP в главном рулевом приводе руля направления стало два независимых золотника, работающих от системы А и В. Соответственно к каждому из них подходит независимый рычаг управления. См. рисунки: вверху до модификации, внизу – после.
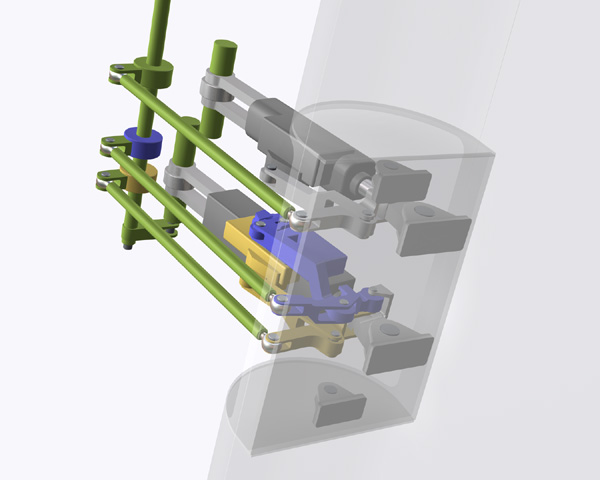
Поскольку сейчас на одном рулевом приводе появилось два независимых входа при фактически одном выходе, то появилась возможность возникновения усилий внутри рулевого привода. За этой ситуацией следит датчик внутренних усилий FFM (force fight monitor), который сразу же включает арбитра – резервную гидросистему с резервным рулевым приводом руля направления. Резервный рулевой привод помогает исправному каналу перебороть отказавший. В кабине пилотов при этом загораются сигналы: “Master Caution” с “FLT CONT” и на верхнем пульте - лампа “STBY RUD ON”. Согласно QRH от пилотов в этом случае требуется избегать больших или резких движений педалями.
Поскольку полное отклонение руля высоты может потребоваться только на этапах взлёта, посадки и ухода на второй круг для парирования разворачивающего момента при отказе двигателя, а на остальных этапах полёта это не нужно и даже опасно, то в системе управления рулём направления предусмотрено ограничение давления подаваемой гидрожидкости.
На «классике» это ограничение включается при наборе высоты более 1000 футов и отключается при снижении ниже 700 футов. На «NG» это происходит, соответственно, при разгоне скорости более 135 узлов и при торможении менее 135 узлов. У пилотов нет ни какой индикации работы системы ограничения давления, за исключением – на «классике», если в гидросистеме А прошла команда на увеличение давления, а оно не увеличилось, то загорается лампа “LOW PRESSURE” на пульте FLT CONTROL «A».
Система связи штурвального колеса с рулём направления
На самолётах модификации «NG» установлена новая система, автоматически отклоняющая руль направления при отклонении командирского штурвального колеса по крену WTRIS (wheel to rudder interconnect system). Данная система включается в работу, когда оба переключателя FLT CONTROL находятся в положении STB RUD и включен YAW DAMPER, то есть когда самолёт управляется вручную мускульными усилиями пилотов. При этом резервный рулевой привод отклоняет руль направления для облегчения управления самолётом по крену.
Система WTRIS работает только при числе М менее 0,4. В промежутке чисел М от 0,3 до 0,4 эффективность системы уменьшается от 1 до нуля. Максимальный угол отклонения руля направления от системы WTRIS: 2° - закрылки убраны, 2,5° - закрылки выпущены.
Механизация крыла
Механизация крыла состоит из механизации передней кромки (leading edge devices), закрылков и интерцепторов.
Механизация передней кромки состоит из 4-х секционных отклоняемых предкрылков Крюгера (flaps) и 6-ти секционных выдвижных щелевых предкрылков (slats). По две секции предкрылков Крюгера расположены между фюзеляжем и мотогондолой и по 3 секции выдвижных предкрылков на оставшейся части передней кромки крыла. Предкрылки Крюгера (Krueger flaps) отклоняются поворотом части передней кромки вперед-вниз и не имеют промежуточных положений в процессе выпуска. Выдвижные предкрылки выпускаются перемещением части передней кромки вперед с образованием щели и имеют два фиксированных выпущенных положения (EXTEND) и (FULL EXTEND).
Менее эффективные предкрылки Крюгера установлены в корневой части крыла для организации первоначального срыва потока в районе центроплана (при выпущенной механизации).
Закрылки 4-х секционные щелевые. Имеют фиксированные углы выпуска 1, 2, 5,10, 15, 25, 30 и 40 градусов. На «классике» закрылки трёхщелевые (см. рисунок внизу).

На «NG» закрылки двухщелевые, причём задняя щель не распространяется на весь размах закрылков (см. рисунок внизу).

Расположение рулевых поверхностей и механизации крыла на «классическом» самолёте.

Предкрылки и закрылки при выпуске значительно увеличивают подъемную силу крыла за счет увеличения длины хорды и кривизны профиля, таким образом, уменьшая скорость захода на посадку и увеличивая маневренные возможности самолета. Выпуск закрылков до 15 увеличивает подъемную силу при относительно малом увеличении сопротивления, при дальнейшем выпуске закрылков сопротивление возрастает значительно быстрее роста подъемной силы.
Система автоматического довыпуска выдвижных предкрылков (auto slat system) улучшает характеристики самолета на больших углах атаки на взлете и заходе на посадку. При отклоненных закрылках на угол 1 – 5 градусов выдвижные предкрылки находятся в промежуточном (EXTEND) положении. Когда угол атаки крыла приближается к сваливанию, выдвижные предкрылки автоматически довыпускаются полностью (FULL EXTEND) прежде, чем сработает предупреждающая тряска штурвала. После уменьшения угла атаки предкрылки возвращаются в исходное положение.
Алгоритм решения проблем с механизацией крыла:

Система управления интерцепторами
На «классике» интерцепторы 10-ти секционные, пронумерованы то 0 до 9 слева направо. Из них 6 секций: 0; 1; 4; 5; 8 и 9 - тормозные интерцепторы (Ground spoilers), отклоняются только на земле для уменьшения длины пробега или прерванного взлета. Четыре секции: 2; 3; 6 и 7 интерцепторы-элероны (Flight spoilers), работают постоянно для управления по крену и коррекции траектории полета.
На “NG” 12 секций интерцепторов, пронумерованы от 1 до 12 слева направо. 1; 6; 7 и 12 секции – Ground spoilers, остальные – Flight spoilers.
Секции интерцепторов-элеронов запитаны симметрично от гидросистем А и В. Поэтому при отказе одной из них эффективность интерцепторов в управлении самолётом по крену уменьшается в два раза.
Секции тормозных интерцепторов запитаны от гидросистемы А. Этим объясняется парадокс, что при отказе гидросистемы А и посадочных закрылках 40 потребная посадочная дистанция больше, чем при отказе гидросистемы В и посадочных закрылках 15.
Принцип работы, преимущества и недостатки интерцепторов см. https://aviacom.ucoz.ru/Principleflight3.doc стр.14 – 16
Управление интерцепторами осуществляется от рукоятки SPEED BRAKE в режиме торможения (симметрично) и от штурвальных колёс – в режиме управления по крену (асимметрично).
При отклонении рукоятки SPEED BRAKE на земле поднимаются все интерцепторы, в полёте – только интерцепторы-элероны.
При отклонении штурвального колеса интерцепторы-элероны на полукрыле с поднятым элероном поднимаются. Интерцепторы-элероны на противоположном полукрыле остаются прижатым к крылу. Таким образом, создаётся кренящий момент в помощь элеронам.
Если при этом рукоятка SPEED BRAKE была отклонена, то на полукрыле с опущенным элероном интерцепторы-элероны приподнимутся ещё выше, а на другом полукрыле выпущенные интерцепторы-элероны немного опустятся. Поскольку в данном случае интерцепторы-элероны изначально приподняты над крылом и находятся вне зоны пограничного слоя, то их эффективность в создании кренящего момента повысится. Боинг предупреждает, что следует избегать маневрирования по крену с выпущенными (особенно в промежуточном положении) интерцепторами, поскольку реакция самолёта на отклонение штурвальной колонки существенно увеличивается и возможно непроизвольное создание большого угла крена (FCTM, глава Descent, раздел Speedbrakes).
Для уменьшения этого недостатка предназначено устройство изменения передаточного коэффициента (spoiler ratio changer) в системе управления интерцепторами-элеронами. Чем выше поднят рычаг SPEED BRAKE, тем меньше коэффициент передачи от штурвального колеса на интерцепторы.
На «классике», с установленными winglets, работает система уменьшения нагрузки на крыло (Load Alleviation System). Если приборная скорость больше 320 узлов и вес самолёта больше 56,7 т, то рычаг SPEED BRAKE автоматически убирается в положение 50% (если был отклонён на больший угол). Пилот может пересилить данную систему, приложив к рычагу дополнительное усилие. При скорости менее 315 узлов и/или весе менее 56,2 т данная система отключается.
На посадке работает система автоматического выпуска интерцепторов. Условия работы: рычаг SPEED BRAKE находится в положении ARM, рычаги обоих двигателей убраны на малый газ и колёса основных стоек шасси раскручены до скорости превышающей 60 узлов. При этом одновременно поднимаются все интерцепторы-элероны и отклоняется рычаг SPEED BRAKE.
Когда обожмётся амортизатор правой стойки шасси, то механически откроется перепускной клапан (bypass valve) тормозных интерцепторов и они также поднимутся. Выпуск интерцепторов-элеронов по раскрутке колёс можно иногда почувствовать при очень мягкой посадке, когда после касания ВПП самолёт вдруг энергично проседает.
Выпуск интерцепторов по раскрутке колёс дублируется системой «земля/воздух», которая выпустит интерцепторы при переходе в режим «земля».
При прерванном взлёте (переключателе autobrake в положении RTO), все интерцепторы поднимутся автоматически (рычаг SPEED BRAKE находится в положении OFF) при следующих условиях: колёса основных шасси раскручены до скорости превышающей 60 узлов, рычаги обоих двигателей убраны на малый газ и переведены в положение реверса тяги. На “NG” это произойдёт также и во время посадки.
Если во время посадки или прерванного взлёта, какой либо рычаг управления двигателем будет переведён на увеличение прямой тяги, то все интерцепторы автоматически убираются и рычаг SPEED BRAKE переместится в положение OFF. Таким образом, можно выполнять прерванную посадку (взлёт с конвейера) пока рычаги двигателей не переведены на реверс тяги. После включения реверса Боинг обязывает экипаж продолжить выполнение посадки.
В таблице собраны отличия в логике работы интерцепторов на NG и classic:
| NG | classic |
| Сигнализация «SPEEDBRAKES EXTENDED» В воздухе – закрылки выпущены ≥ 15º и/или высота по радиовысотомеру ˂ 800 футов. На земле при опущенном рычаге есть давление в системе тормозных интерцепторов. Не взлетать! | |
| Перемещение рычага «speed brakes» за пределы «flight detent» в полёте | |
| запрещено | не рекомендуется |
| Специальный стопор не позволяет при убранных закрылках сдвинуть рычаг «speed brakes» за пределы «flight detent». Поэтому при посадке с убранными закрылками интерцепторы не поднимутся на полный ход. (только на самолётах с опцией улучшенных взлётно-посадочных характеристик*) | |
| На самолётах с установленными законцовками крыльев работает «Load Alleviation System» | |
| Условия работы «auto speed brake» | |
| Для работы системы необходим сигнал от радиовысотомера, что высота менее 10 футов Также «auto speed brake» будет работать при рычаге «speed brakes» в положении «DOWN» и поднятых рычагах реверса двигателей | |
| Условия подъёма интерцепторов-элеронов при работе «auto speed brake» | |
| Обжатие любой стойки шасси | Раскрутка колёс основных стоек ˃ 60 узлов, если нет сигнала раскрутки, то по обжатию шасси |
*- NG могут иметь опцию улучшенных взлётно-посадочных характеристик. При этом увеличиваются максимальные углы отклонения интерцепторов-элеронов от 33/38º до 56/65º, а тормозных интерцепторов от 52/60º до 60/60º.
Скорость полета
Номенклатура скоростей, используемых в руководствах Боинг:
- Приборная скорость (Indicated или IAS) - показание указателя воздушной скорости без учёта поправок.
- Индикаторная земная скорость (Calibrated или CAS). Индикаторную земную скорость получают из приборной скорости путём внесения аэродинамической и инструментальной поправок.
- Индикаторная скорость (Equivalent или EAS). Индикаторную скорость получают из индикаторной земной скорости путём внесения поправки на сжимаемость воздуха.
- Истинная скорость (True или TAS). Истинную скорость получают из индикаторной скорости путём внесения поправки на плотность воздуха.
Пояснения к скоростям начнем в обратном порядке.
Истинная скорость самолета – это его скорость относительно воздуха. Измерение воздушной скорости на самолете осуществляется с помощью приемников воздушного давления (ПВД). В них замеряется полное давление заторможенного потока р* (pitot) и статическое давление р (static). Предположим, что ПВД на самолете – идеальное и не вносит никаких погрешностей и, что воздух несжимаем. Тогда прибор, измеряющий разность полученных давлений, измерит скоростной напор воздуха р* - р = r*V2/2. Скоростной напор зависит как от истинной скорости V, так и от плотности воздуха r. Поскольку градуировка шкалы прибора производится в земных условиях при стандартной плотности, то в этих условиях прибор будет показывать истинную скорость. Во всех остальных случаях прибор будет показывать отвлечённую величину, называемую индикаторной скоростью Vi = VÖr/rстандарт = VÖD.
Индикаторная скорость Vi играет важную роль не только как величина, необходимая для определения воздушной скорости. В горизонтальном установившемся полете при заданной массе самолета она однозначно определяет его угол атаки и коэффициент подъемной силы.
Учитывая, что при скоростях полета более 100 км/час начинает проявляться сжимаемость воздуха, реальная разница давлений, замеренная прибором, будет несколько больше. Данная величина будет называться земной индикаторной скоростью Viз (calibrated Vc).
Разность Vi-Viз называется поправкой на сжимаемость и увеличивается по мере роста высоты и скорости полета.
Летящий самолет искажает статическое давление вокруг себя. В зависимости от точки установки приемника давления прибор будет замерять несколько разные статические давления. Полное давление практически не искажается. Поправка на расположение точки замера статического давления называется аэродинамической (correction for static source position). Также возможна инструментальная поправка на отличие данного прибора от стандарта (у Боинга принята равной нулю). Таким образом, величина, показанная реальным прибором, подключенным к реальному ПВД, называется приборной скоростью (indicated).
На совмещенных указателях скорости и числа М индицируется земная индикаторная (calibrated) скорость от компьютера высотно-скоростных параметров (Air data computer). На комбинированном указателе скорости и высоты индицируется приборная (indicated) скорость, полученная по давлениям, взятым непосредственно из ПВД.
Рассмотрим типичные неисправности, связанные с ПВД.
Обычно экипаж распознает проблемы в процессе взлета или вскоре после отрыва от земли.
В большинстве случаев это проблемы, связанные с замерзанием воды в трубопроводах.
В случае закупорки трубопровода полного давления (pitot probes) указатель скорости не покажет увеличения скорости в процессе разбега на взлете. Однако после отрыва скорость начнет расти, поскольку статическое давление будет уменьшаться. Высотомеры будут работать практически правильно. При дальнейшем наборе скорость будет расти через правильное значение и далее превысит ограничение с соответствующим срабатыванием сигнализации (overspeed warning). Сложность данного отказа в том, что какое-то время приборы будут показывать практически нормальные показания, что может вызвать иллюзию восстановления нормальной работы системы.
В случае закупорки трубопровода статического давления (static ports) в процессе разбега система будет работать нормально, но в процессе набора высоты покажет резкое уменьшение скорости вплоть до нуля. Показания высотомеров останутся на высоте аэродрома. Если пилоты пытаются сохранить требуемые показания скорости путем уменьшения тангажа в наборе высоты, то, как правило, это заканчивается выходом за ограничения по максимальной скорости.
Кроме случаев полной закупорки возможна частичная закупорка или разгерметизация трубопроводов. При этом распознать отказ может быть значительно сложнее. Ключевым моментом является распознание систем и приборов, не затронутых отказом и завершение полета с их помощью. Если есть индикация угла атаки – пилотировать внутри зеленого сектора, если нет – установить тангаж и обороты двигателей N1 в соответствие с режимом полета по таблицам «Unreliable airspeed» в QRH. По возможности выйти из облаков. Попросить помощь у службы движения, учитывая, что они могут иметь неправильную информацию о вашей высоте полета. Не доверять приборам, показания которых были под подозрением, но в данный момент, кажется, работают правильно.
Как правило, надежная информация в этом случае: инерциальная система (положение в пространстве и путевая скорость), обороты двигателей, радиовысотомер, срабатывание stick shaker (приближение к сваливанию), срабатывание EGPWS (опасное сближение с землей).
На графике показана потребная тяга двигателя (сила сопротивления самолета) в горизонтальном полете на уровне моря в стандартной атмосфере. Тяга указана в тысячах фунтов, а скорость – в узлах.
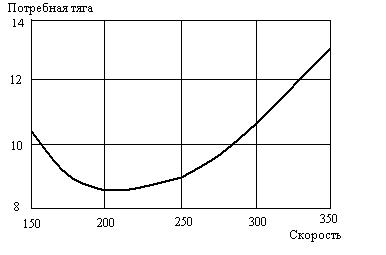
Наивыгоднейшая скорость (скорость минимального лобового сопротивления) в полётной конфигурации самолёта может быть рассчитана по следующей мнемонической формуле: Vнаивыг = 2,2 * (G – 50) + 215
Где G – текущий вес самолёта в тоннах, а результат получится в узлах.
Например: вес 60 тонн. Отнимаем 50, остаётся 10, умножаем на 2,2 - получаем 22, складываем с 215, получаем 237 узлов.
Данная формула получилась из анализа скоростей FMC со странички Climb режим Max angle, поскольку именно на наивыгоднейшей скорости самолёт имеет максимальный угол набора высоты или же минимальный угол снижения при планировании.

Расчётная скорость маневрирования (VA) – это скорость, ограничения маневрирования самолёта. Если скорость больше или равна VA, то нельзя использовать полные углы отклонения рулей и выводить самолёт на углы атаки, близкие к критическим, поскольку при этом нагрузки на элементы конструкции могут превысить предельно допустимые значения. (см. https://aviacom.ucoz.ru/Principleflight4.doc стр. 4)
| Высота, футы | VA |
| 275 узлов | |
| 285 узлов | |
| 295 узлов | |
| 310 узлов |
Скорости для Classic
VMO/MMO (maximum operating limit speed/ Mach) Скорость/ число М максимальные эксплуатационные равны 340 узлов / 0.82 М

На фото VA для 737-800.