Процесс балансировки карданного вала на балансировочном станке рассмотрим на примере использования в качестве измерительной системы станка прибора Балком-4.
Прибор «Балком-4» является портативным балансировочным комплектом, предназначенным для балансировки в одной, двух, трёх и четырёх плоскостях коррекции роторов, вращающихся в собственных подшипниках или установленных на балансировочном станке. Прибор включает в себя: до 4-х датчиков вибрации, датчик фазового угла, 4-х канальный измерительный блок, а так же переносной компьютер. Весь процесс балансировки, включающий в себя измерение, обработку и вывод на индикацию информации о величине и месте установки корректирующих грузов, выполняется в автоматизированном режиме и не требует от пользователя дополнительных навыков и знаний, выходящих за рамки прилагаемой инструкции. Результаты всех балансировок сохраняются в Архиве балансировки и при необходимости могут быть распечатаны в виде протоколов. Помимо балансировки прибор «БалКом-4» дополнительно может использоваться как обычный вибротахометр, позволяющий осуществлять измерение по четырём каналам среднего квадратического значения (СКЗ) суммарной вибрации, СКЗ оборотной составляющей вибрации, а также контролировать частоту вращения ротора. Кроме того, данный прибор позволяет выводить дисплей графики временной функции и спектра вибрации по виброскорости, что может быть полезным при оценке технического состояния балансируемой машины.

Направление оси чувствительности датчиков должно совпадать с направлением вибросмещения опор, в данном случае - горизонтальном.
Дополнительную информацию об установке датчиков см. в БАЛАНСИРОВКА РОТОРОВ В ЭКСПЛУАТАЦИОННЫХ УСЛОВИЯХ.
Установка датчиков силы зависит от конструктивных особенностей станка.
Установить датчики вибрации 1, 2, 3, 4 на опорах балансировочного станка.
Подключить датчики вибрации к разъемам Х1, Х2, Х3, Х4.
Установить датчик фазового угла (лазерный тахометр) 5 таким образом, чтобы номинальный зазор между радиальной (или торцовой) поверхностью балансируемого ротора и корпусом датчика находился в диапазоне от 10 до 300 мм.
Наклеить на поверхность ротора метку из катафотной ленты шириной не менее 10 -15 мм.
Подключить датчик фазового угла к разъёму Х5.
Подключить измерительный блок к USB-входу компьютера.
При использовании сетевого питания подключить компьютер к блоку сетевого питания. Подключить блок питания к сети 220 В, 50 Гц.
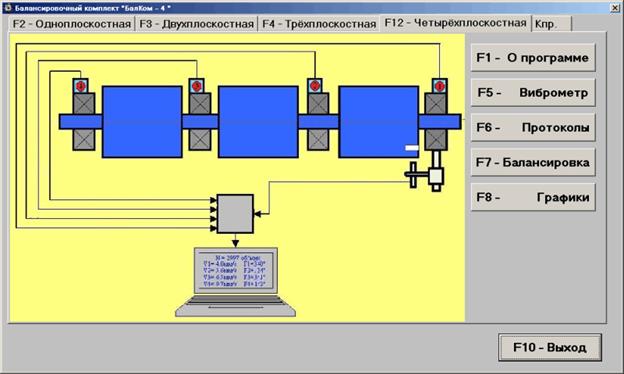
Включить компьютер и выбрать программу «БалКом-4». При нажатии кнопки «F12-четырёхплоскостная» (или функциональной клавиши F12 на клавиатуре компьютера) производится выбор режима измерения вибрации одновременно в четырёх плоскостях с использованием датчиков вибрации 1, 2, 3, 4, подключённых соответственно к входам Х1, Х2, Х3 и Х4 измерительного блока. В этом случае на дисплее компьютера появляется мнемосхема, представленная на рис. 16, иллюстрирующая процесс измерения вибрации одновременно по четырем измерительным каналам (или процесс балансировки в четырёх плоскостях).
Внимание!:
После завершения процесса измерения на пятом пуске балансируемой машины необходимо остановить вращение её ротора и снять с него, установленный ранее, пробный груз. Только после этого можно приступать к установке (или съему) на роторе корректирующих грузов.
Отсчет углового положения места добавления (или удаления) на роторе корректирующего груза в полярной системе координат выполняется от места установки пробного груза. Направление отсчета угла совпадает с направлением вращения ротора.
В случае балансировки по лопастям лопасть балансируемого ротора, условно принимаемая за 1-ю, совпадает с местом установки пробного груза. Направление отсчёта номера лопасти, указанной на дисплее компьютера, выполняется по направлению вращения ротора.
В данной версии программы по умолчанию принимается, что корректирующий груз будет добавлен на ротор. Об этом свидетельствует метка, установленная в поле «Добавление». В случае корректировки дисбаланса путём удаления груза (например высверлива-нием) необходимо установить с помощью мышки метку в поле «Съём», после чего угловое положение корректирующего груза автоматически изменится на 180.
После установки на балансируемом роторе корректирующих грузов нужно нажать кнопку «Выход -F10» (или функциональную клавишу F10 на клавиатуре компьютера), вернуться в предыдущее рабочее окно программы «Балансировка в 4-х плоскостях» и провести проверку эффективности выполненной балансировочной операции После завершения проверочного пуска результаты измерений частоты вращения ротора (Nоб) а также значения величин СКЗ (Vо1, Vо2, Vо3, Vо4) и фаз (F1, F2, F3, F4) вибрации, проявляющиеся на частоте вращения баланcируемого ротора. Одновременно поверх рабочего окна «Балансировка в 4-х плоскостях» появляется рабочее окно «Балансировочные грузы» (см. рис.21), в котором выводятся результаты расчёта параметров дополнительных корректирующих грузов, которые необходимо установить (удалить) на роторе для компенсации его остаточного дисбаланса. Кроме того в этом же окне выводится величины остаточного дисбаланса ротора, достигнутые после балансировки. В случае, когда величины остаточной вибрации и/или остаточного дисбаланса балансируемого ротора удовлетворяют требованиям допусков, установленных в технической документации, процесс балансировки может быть завершён. В противном случае процесс балансировки может быть продолжен. Это позволяет методом последовательных приближений скорректировать возможные погрешности, которые могут иметь место при установке (удалении) корректирующего груза на балансируемом роторе. При продолжении процесса балансировки на балансируемом роторе необходимо установить (удалить) дополнительные корректирующие грузы, параметры которых указаны в окне «Балансировочные грузы».
Кнопка «Коэффициенты – F8» (или функциональная клавиша F8 на клавиатуре компьютера) используется для просмотра и запоминания в памяти компьютера коэффициентов балансировки ротора (коэффициентов динамического влияния), рассчитанных по результатам пяти тарировочных пусков.