Вопросы стыковки и согласования узлов привода всегда были актуальны и трудоемки. Особенно актуальны, они стали сейчас, когда привод собирается, в основном, из покупных узлов. Рассмотрим вопрос стыковки на примере соединения электродвигателя с редуктором (рис. 2.25).
| a |
| е |
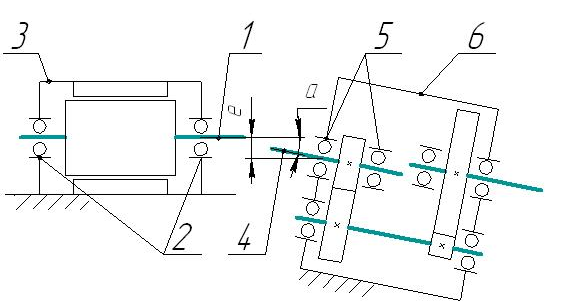
Рис. 2.25. Схема стыковки электродвигателя с редуктором:
1 – вал электродвигателя; 2, 5 – опоры; 3, 6 – корпус; 4 – вал редуктора
Вал 1 электродвигателя имеет опоры 2, расположенные в корпусе 3. Входной вал 4 редуктора имеет опоры 5, расположенные в корпусе 6. Если опоры 2 и 5 существенно несоосны, то жесткое соединение валов приведет к большим реакциям в опорах и подшипники либо быстро износятся, либо их заклинит. Обеспечить высокую соосность опор, расположенных в разных корпусах, сложно. Всегда есть радиальное смещение осей опор е и угловое смещение α. Поэтому валы соединяют не жестко, а с помощью различных подвижных муфт, «развязывающих» валы (и это главное назначение муфт, а не только передача вращения с одного вала на другой). Типовая компоновка привода с двигателем и редуктором на лапах изображена на рис. 2.26.
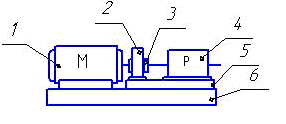
Рис. 2.26. Компоновка привода с двигателем и редуктором на лапах:
1 – электродвигатель на лапах; 2 – тормоз внешний; 3 – муфта; 4 – редуктор;
5 – подставка для совмещения осей; 6 – рама
Такая компоновка имеет ряд недостатков:
· при больших скоростях вращения муфты работают нормально, без вибраций, только при небольших несоосностях соединяемых валов; обеспечить малую несоосность сложно;
· конструкция привода в целом получается громоздкой и неудобной для встраивания в машину.
|
|
Поэтому, современные приводы стараются строить по-другому, например, как показано на рис. 2.27.
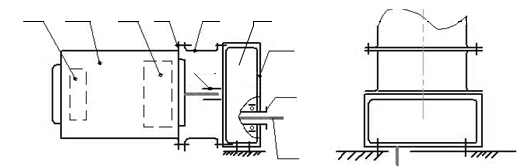
Рис. 2.27. Мотор-редуктор (в различных положениях):
1 – двигатель; 2 – фланец; 3 – редуктор; 4 – адаптер; 5 – гнездо; 6 – тормоз;
7 – датчик; 8 – выходной вал редуктора; 9 – закладной вал; 10 – лапа
Здесь двигатель 1 имеет фланцевое исполнение и закреплен за фланец 2 на редукторе 3 непосредственно или через переходник (адаптер) 4. Компенсирующую муфту в этом случае можно исключить.
При наличии центрирующих элементов на стыкуемых деталях и высокой точности изготовления этих деталей можно обеспечить необходимую соосность соединяемых валов. Вал двигателя в этом случае соединяется с валом редуктора жестко, например, вал двигателя вставляется в гнездо 5 входного вала редуктора. Если в приводе необходим тормоз 6 и (или) датчик 7 угла поворота и скорости вала двигателя, их встраивают внутрь двигателя. Подобную компактную конструкцию называют мотор–редуктор.
Выходной вал редуктора 8 часто выполняют полым. Тогда в этом валу можно закрепить закладной вал 9, хвостовик которого может быть любым, по желанию конструктора. Лапы 10 на редукторе выполняют по периметру корпуса, что позволяет закреплять мотор-редуктор в разных положениях. Все это существенно упрощает встраивание привода в машину.
В маломощных мотор-редукторах все функциональные элементы часто располагаются в едином корпусе (рис. 2.28).

Рис. 2.28. Мотор-редуктор в едином корпусе:
|
|
1 – корпус; 2 – датчик угла поворота или датчик скорости; 3 – электродвигатель; 4 – дисковый электромагнитный тормоз; 5 – планетарный редуктор
И только мощные тяжелые приводы по-прежнему в основном компонуют по схеме, приведенной на рис. 2.26.
Выбор электродвигателя
При выборе электродвигателя ориентируются, прежде всего, на требования к приводу, в котором двигатель будет работать. Учитывают свойства и характеристики двигателя, исходящие из его принципа действия и устройства, учитывают ограничения по применению двигателя. Ориентируясь только на характеристики двигателя, записанные в его паспорте, и не понимая устройства двигателя, при выборе двигателя легко ошибиться, так как ни в одном паспорте невозможно описать все возможные случаи и все нюансы применения двигателя. В паспорте учитывают только типовые, часто встречающиеся случаи, и набор характеристик, записанных в паспорте, весьма ограничен.
При выборе двигателя, прежде всего, необходимо определиться с его типом, например, двигатель постоянного или переменного тока. Здесь выбор изначально зависит от имеющегося источника питания. Источником постоянного тока может быть аккумулятор, батарея, неуправляемый выпрямитель на диодах (одно- или двухполупериодный), простой или сложный управляемый выпрямитель на тиристорах (управляемых диодах) или на транзисторах. Источником переменного тока может быть одно- и трехфазная сеть или частотный преобразователь. Современные приводы стараются строить на двигателях переменного тока, как более простых, надежных, дешевых, за исключением, малогабаритных высокоскоростных двигателей (микродвигателей).
|
|
Конечно, если определяющим при выборе двигателя является источник питания, двигатель должен быть согласован с ним по электрическим параметрам: роду тока, величине тока, величине напряжения.
Далее выбирают двигатели по скорости.
Имеют в виду, что высокоскоростные двигатели, при одинаковых габаритах с низкоскоростными, имеют большую мощность, но требуют редуктор с большим передаточным числом. При больших скоростях имеет место повышенный шум, а некоторые типоразмеры редукторов вообще не допускают больших скоростей на входном валу. Исходя из сказанного, например, наибольшее применение среди асинхронных двигателей имеют двигатели с n 0 = 1500 об/мин.
Далее следует выбрать двигатель по мощности и моменту. Известно, что основной причиной выхода двигателей из строя является их перегрев. Нагрев двигателя зависит от режима работы и качества охлаждения. Режим работы может быть легким – с редкими пусками и длительными паузами, во время которых двигатель полностью охлаждается, и тяжелым – с частыми или длительными (тяжелыми) пусками при больших пусковых токах. Режимы работы нерегулируемых по скорости двигателей обозначаются по ГОСТ как S 1, S 2… S 10. Рассмотрим два характерных режима: S 1 и S 4.
Режим S 1 работы двигателя соответствует включению и длительной работе при постоянной нагрузке.
Мощность двигателя при поступательном движении исполнительного звена равна
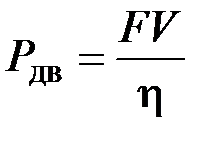 , (2.14)
, (2.14)
где F – сила сопротивления движению исполнительного звена;
V – линейная скорость движения исполнительного звена;
η– КПД механизма.
Мощность двигателя при вращательном движении исполнительного звена равна
 , (2.15)
, (2.15)
где ω – угловая скорость движения исполнительного звена;
M – момент сопротивления движению исполнительного звена.
По каталогу выбирают двигатель ближайший по мощности, для которого выполняется условие 
Режим S 4 работы двигателя соответствует затяжным пускам и (или) высокой частоте включений. S 4 – повторно-кратковременный (старт-стопный) режим – последовательность одинаковых циклов, состоящих из периодов работы с постоянной нагрузкой и пауз
(рис. 2.29).

Рис. 2.29. Диаграмма работы двигателя в режиме S 4
Максимальная (при ωдв = ωmax) мощность двигателя в режиме S 4
где P ст – статическая (не зависящая от ускорения при разгоне) мощность на исполнительном звене механизма;
P дин – максимальная динамическая мощность – мощность, необходимая для преодоления сил инерции при разгоне системы двигатель–механизм.
Выражения для статической и динамической мощности имеют вид
 или
или  , (2.16)
, (2.16)
P дин = k п maV или P дин = k п J εω, (2.17)
где m и J – масса или момент инерции исполнительного звена;
a и ε – линейное или угловое ускорение исполнительного звена;
k п – коэффициент, учитывающий влияние пускового момента и инерции ротора двигателя, k п = 0,6...0,9; при быстром разгоне системы принимают большие значения k п.
Желаемым ускорением исполнительного звена надо задаться или, зная установившуюся скорость исполнительного звена, задаться временем разгона привода t раз, тогда при равноускоренном разгоне
a = V/t разилиε = ω /t раз. (2.18)
Также надо задаться синхронной скоростью двигателя n 0.
По найденной мощности и скорости n 0 выбирают по каталогу двигатель, у которого мощность P дин ³ P дв. Этот выбор предварительный, так как приблизительно был выбран коэффициент k п, а также не учтен главный для режима S 4 фактор – тепловое состояние двигателя.
С учетом пускового момента двигателя M двп и момента инерции ротора двигателя J дв (M двп и J дв берутся из каталога) фактическое время разгона привода
 (2.19)
(2.19)
где J пр – приведенный момент инерции устройства двигатель–механизм, J пр = J прм + J дв; J прм – приведенный к валу двигателя момент инерции механизма, включая исполнительное звено (правило приведения – по формуле 2.4);
wдв – номинальная скорость двигателя, wдв » 0,1× n дв (n дв в с размерностью об/мин находится по каталогу).
Если полученное время разгона слишком велико, надо выбрать двигатель большей мощности и расчет повторить; если слишком мало – выбрать двигатель меньшей мощности.
Тепловое состояние двигателя приблизительно характеризует относительная продолжительность включения. Рассмотрим график теплового состояния (рис. 2.30) для цикла работа–пауза.
| t раз |
| t (с, мин) |
| работа |
| пауза |
| t п |
| t р |
| T |
| T - цикл |
| t п |
| t р |
| температура нагрева двигателя |
| максимально допустимая температура |
| q (°C) |
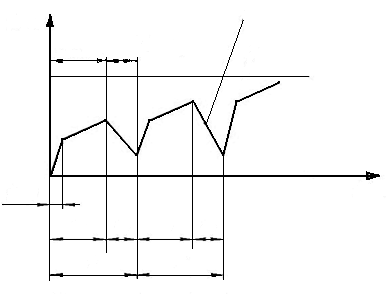
Рис. 2.30. График теплового состояния двигателя
Относительная продолжительность включения, %
ПВ = 100 ×t p /(t p + t п ) = 100 × t p /Т, (2.20)
где t p – время работы двигателя;
t п – время паузы – перерыва в работе; Т – время цикла.
Если продолжительность цикла менее 1...2 минут (частые пуски), а ПВ выше 40…50 %, необходимо предусматривать запас по мощности, вплоть до двукратного, при непрерывных пусках и торможениях.
Уточненный тепловой расчет сводится к определению допустимого числа включений выбранного двигателя в единицу времени и сравнению этого числа с фактическим числом включений. Расчет ведется с помощью коэффициентов, значения которых приводятся в каталогах. Точный тепловой расчет практически невозможен из-за сложности определения теплового баланса нагрев-охлаждение.
| M, Нм |
| M 1 |
| T |
| - |
| + |
| t, c |
| t 8 |
| t 7 |
| t 6 |
| t 5 |
| t 4 |
| t 3 |
| t 2 |
| t 1 |
| M 8=0 |
| M 7 |
| M 6 |
| M 4=0 |
| M 5 |
| M 3 |
| M 2 |
| M 1 |
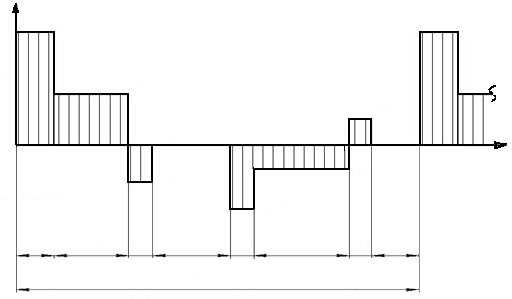
Рис. 2.31. Диаграмма моментов, нагружающих двигатель
На диаграмме использованы следующие обозначения:
М 1 – момент при разгоне, время действия момента – t 1.
M 2– момент при установившемся движении.
М 3 – момент при торможении.
М 4 = 0 – пауза в работе привода.
М 5 – момент при разгоне при движении в обратном направлении.
М 6 – момент при установившемся движении.
М 7 – момент при торможении.
M 8 = 0 – пауза.
Т – время цикла.
Устанавливаемый двигатель должен отвечать следующим условиям:
1. Пиковый момент М mах обычно не должен превышать трехкратное значение номинального момента двигателя М 0.
2. Расчетный эквивалентный момент М экв не должен превышать значение номинального момента М 0.
Первое условие связано с перегрузочными возможностями двигателя. Обычно пиковый момент имеет место на участке разгона; на рис. 2.31 М mах = М 1. Второе условие определяет работоспособность двигателя по тепловым нагрузкам.
По первому условию, в соответствии с рис. 2.30
М 0 ≥ М mах / 3 = М 1 / 3. (2.21)
По второму условию
 . (2.22)
. (2.22)
Выбор двигателя по моменту М 0, так же как и выбор двигателя, работающего в режиме S 4, приходится вести в несколько этапов: сначала предварительный выбор, затем окончательный. Это связано с тем, что изначально неизвестны (двигатель еще не выбран) момент инерции ротора двигателя и его пусковой момент. Поэтому диаграмма моментов (рис. 2.31) сначала составляется без учета параметров двигателя.
Наконец, при выборе двигателя нужно еще учесть условия внешней среды: температуру, влажность, запыленность и т. п. Существуют двигатели пылезащищенные, брызгозащищенные, взрывобезопасные и др.
Типы защиты от внешней среды обозначают буквами IР (International Protection) и двумя цифрами; первая характеризует защиту от посторонних предметов, вторая – защиту от попадания воды, например, IР 54. Обозначения могут изменяться от IР 00 (нет защиты) до IР 68 (6 – защита от попадания любых предметов и любой пыли, 8 –защита при длительном погружении в воду).