СТРУКТУРНОЕ ИССЛЕДОВАНИЕ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Задание.
Проанализировать структуру механизмов заданной схемы (номер схемы равен номеру варианта для ДЗ-1).
Порядок выполнения задания
1.1. Вычертить схему механизма.
1.2. Пронумеровать звенья арабскими цифрами, неподвижному звену (стойке), как правило, присваивается номер «0». Установить класс каждой кинематической пары, образуемой звеньями механизма.
1.3. Рассчитать степень подвижности механизма и проанализировать полученный результат. Если в механизме присутствуют пассивные связи и (или) местные подвижности, избавиться от них и повторить расчет.
1.4. Заменить высшие пары (если они имеются в механизме) кинематическими цепями с низшими парами; замену произвести непосредственно на кинематической схеме, для обозначения фиктивных звеньев в заменяющем механизме использовать обозначения Ф1, Ф2 и т.д. Определить степень подвижности заменяющего механизма, результат сопоставить с полученным в п. 1.3.
1.5. Разбить заменяющий механизм на структурные группы и начальный механизм. Определить класс и порядок каждой группы Ассура, а для групп 2 класса, кроме этого, определить вид.
1.6. Записать формулу строения механизма и определить его класс.
Пример.
Произвести структурное исследование механизма (рис. 1).
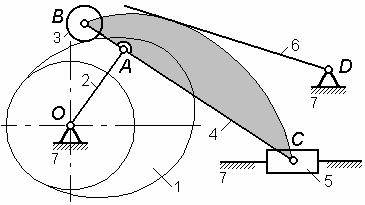
Рис.1
Решение.
Степень подвижности механизма W определим по формуле Чебышёва П.Л.:
 ,
,
где  –число подвижных звеньев;
–число подвижных звеньев;  – число кинематических пар V класса;
– число кинематических пар V класса;  – число кинематических пар IV класса. После подстановки получим
– число кинематических пар IV класса. После подстановки получим
 ,
,
то есть механизм имеет две степени свободы, что не соответствует реальному положению вещей.
Механизм содержит местную подвижность, не влияющую на его кинематику – вращение ролика 3 относительно шатуна 4. Устраним эту подвижность, объединив ролик и шатун в одно звено (рис. 2) и вновь рассчитаем число степеней свободы механизма
 .
.
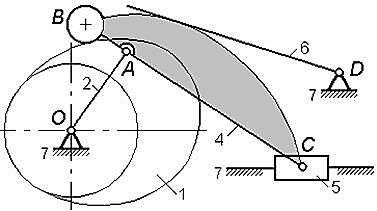
Рис. 2
Этот результат в отличие от предыдущего показывает истинную (фактическую) подвижность механизма; таким образом, его положение полностью характеризуется одной обобщенной координатой, что, то же самое, заданием положения одного любого звена, образующего кинематическую пару со стойкой.
Произведем замену каждой высшей кинематической пары двумя парами пятого класса и фиктивным звеном; на рис. 3 изображена процедура замены, причем точки B, С 1 и С 2 – центры кривизны профилей, участвующих в высших парах.
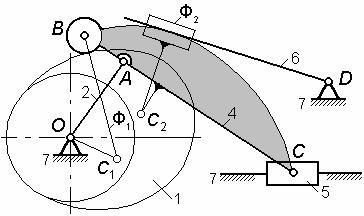
Рис.3
В результате замены высших пар получаем мгновенно - заменяющий механизм (рис. 4) с той же подвижностью, что и до замены; поскольку  ,
,  ,
,  , то, следовательно
, то, следовательно
 .
.
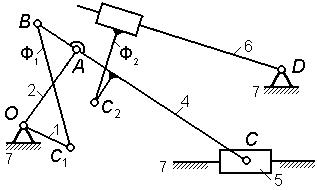
Рис.4
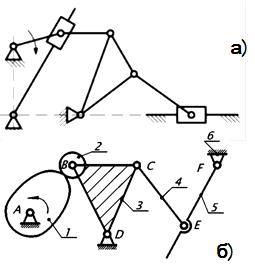
Очевидно, что исследуемый механизм может иметь только одно начальное звено из множества – 1, 2, 5, или 6. Если 1 звено принять за начальное, то в состав механизма входят структурная группа 2-го класса 2-го порядка 3-го вида (рис. 5,а), структурная группа 3-го класса 3-го порядка (рис. 5.б) и начальный механизм первого класса (рис. 5,в)
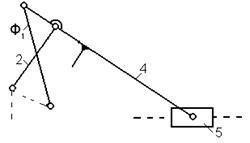

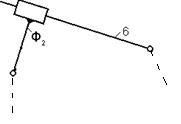
а) б) в)
Рис. 5
Класс механизма равен трем и соответствует наивысшему классу группы Ассура в его составе.
Запишем формулу строения механизма. Форма представления структурной группы –  .
.

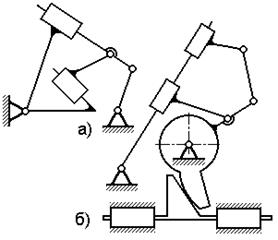
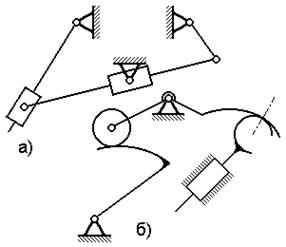
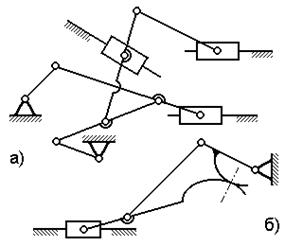
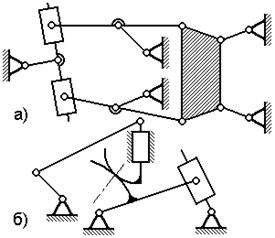
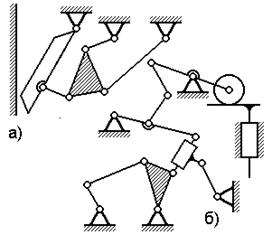
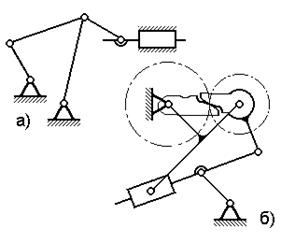
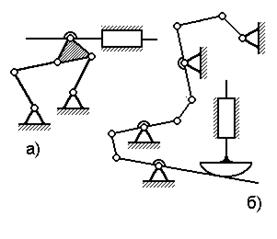
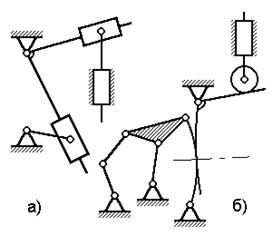
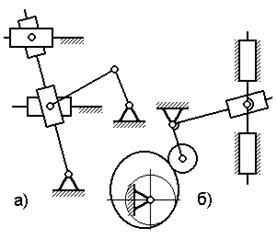
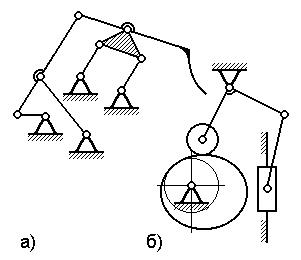
Варианты заданий
1 |
2 | ||||||
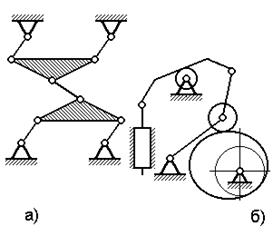
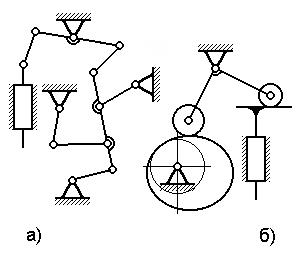
3 |
4 | ||||||
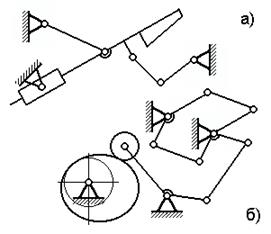
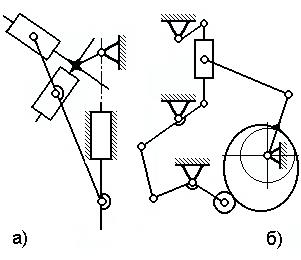
5 |
6 | ||||||
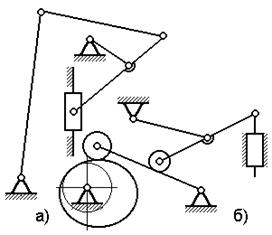
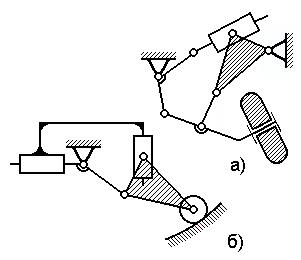
7 |
8 | ||||||
9 |
10 | ||||||
11 |
12 | ||||||
13 |
14 | ||||||
15 |
16 | ||||||
17 |
18 | ||||||
19 |
20 | ||||||
21 |
22 | ||||||
23 |
24 | ||||||
25 |
26 | ||||||
27 |
28 | ||||||
|
30 |