ВВЕДЕНИЕ
Цель данной курсовой работы обучение правилам и методам проектирования, развитие необходимых навыков по проведению инженерных расчетов и составлению технико-экономического обоснования принимаемых технологических и конструктивных решений, по оформлению графической части проекта, самостоятельно подходить к решению конкретных задач проектирования, а также подготовить к более сложной задаче заключительного этапа учебного процесса – выполнению дипломного проекта.
Раздел 1
1.1 Описание системы NAVTEX
Система NAVTEX является неотъемлемой частью Глобальной Морской Системы Связи при Бедствии (ГМССБ, или по международному обозначению GMDSS). Международная система для автоматизированной передачи навигационной, метеорологической, информации по безопасности мореплавания, штормовых предупреждений и другой срочной информации в режиме узкополосного буквопечатания (УБПЧ, режим F1B). Сообщения NAVTEX передаются береговыми станциями, находящимися в прибрежной зоне и радиус их действия до 400 морских миль. Система введена в действие 1 августа 1992 года, в соответствии с принятой Конвенцией СОЛАС-74 и внедрением ГМССБ (GMDSS).
Для службы NAVTEX специально выделены несколько частот в средневолновом диапазоне: 518 кГц (международная), 490 кГц и 424 кГц (национальные). Кроме этого для национальных служб NAVTEX выделены частоты в коротковолновом диапазоне: 4209.5 кГц. Т.е. на частоте 518 кГц работают береговые станции, передающие информацию на английском языке по всемирному расписанию, где для каждой береговой станции выделен специальный промежуток времени для передачи информации. Расписание составляется Всемирной службой Навигационных предупреждений (ВСНП или WWNWS – WorldWideNavigationalWarningService), которая является составной частью ГМССБ.
Вся территория мирового океана разделена на 16 районов NAVAREA – НАВАРЕА (навигационные районы) карта разделения на территории представлена на рисунке 1.1.
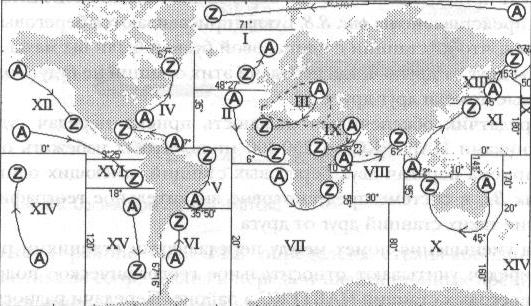
Рисунок 1.1 – Карта районов NAVAREA
NAVAREA I – Северная часть Атлантического океана
NAVAREA II – Южная часть Атлантического океана
NAVAREA III – Средиземное море
NAVAREA IV – Восточная часть Атлантического океана (Восточное побережье США и Канады)
NAVAREA V – Побережье Бразилии (Южная Америка)
NAVAREA VI – Прибрежные районы Аргентины и Уругвая
NAVAREA VII – Район от Южной Африки до Антарктиды (Атлантический и Индийский океаны)
NAVAREA VIII – Прибрежные районы Индии
NAVAREA IX – Район Персидского и Аденского заливов и Красного моря
NAVAREA X – Прибрежные районы Австралии
NAVAREA XI – Южная Азия
NAVAREA XII – Западная часть Тихого океана
NAVAREA XIII – Прибрежные районы России
NAVAREA XIV – Прибрежные районы Новой Зеландии и Южной части Тихого океана
NAVAREA XV – Прибрежные районы Чили (Западная часть Тихого океана)
NAVAREA XVI – Побережье Перу
Каждый район NAVAREA обслуживает группа береговых передающих радиостанций, работа которых координируется страной-координатором (в которой находится координационный центр данного района). Например, для NAVAREA III – страна-координатор Испания, для NAVAREA XIII – Россия.
Координатор района NAVAREA получает и передает следующие типы информации (согласно требованиям ГМССБ):
1.Навигационные предупреждения (COASTAL)
2.Метеорологическую информацию (WEATHER FORECAST)
3.Информацию по поиску и спасанию
4.Предупреждения о пиратских нападениях
В системе NAVTEX Сигнал передается в режиме излучения F1B, FEC Collective (т.е. сообщение для всех). F1B представляет собой частотную модуляцию несущей цифровым сигналом, содержащим набор данных в режиме узкополосногобукво - печатания. Необходимая ширина полосы 304 Гц. Недостатком режима F1B является сложность поддержания стабильности частоты (при режиме УБПЧ она не должна превышать 10 Гц), поэтому сейчас и NAVTEX и информация по безопасности мореплавания (ИБМ) передаются в режиме J2B (хотя в мануалах и расписаниях сохраняется прежнее обозначение F1B). J2B представляет собой однополосную амплитудную модуляцию с полностью подавленной несущей (как правило верхняя боковая полоса USB), один канал, содержащий цифровую информацию с использованием поднесущей. На сегодняшний день все передатчики ИБМ и NAVTEX работают в режимеJ2B.
Вещание станций жестко регламентировано, каждая станция должна выходить в эфир в определенное время в соответствии с графиком работы, это обеспечивает исключение взаимных помех от станций друг другу. При этом станции, работающие в частотах выделенных передачи информации на национальном языке, могут. Во время «окон» в графике вещания работать
другими видами модуляции и передавать иные информационные сообщения, например передача голосовой информации о погоде загруженности прилегающих портов и т.д. При этом необходимо учитывать график работы остальных станции на этой частоте, для исключения взаимных помех.
1.2 Технические характеристики одного из моделей приемника JMC NT- 900:
-Частота приема 518 кГц;
-Дальность приема 250-400 миль;
-Чувствительность не хуже 5 мкВ;
-Селективность по соседнему каналу (при растройке 2кГц) 60дБ, (при растройке 300 Гц) 6дБ;
-Уровень паразитных излучений не более 2нВт;
-способ вывода информации термопринтер с длинной строки 42 символа, скорость печати 0,7 линии в секунду;
-Напряжение питания от 9 до 40 В;
- Максимальный потребляемы ток 1,5А, средняя потребляемая мощность 9 Вт.
Приемник должен быть:
-портативным;
-иметь ЖК дисплей для отображения принятой информации;
-выход для подключения внешнего принтера или ПЭВМ;
-разъем для внешней памяти, для сохранения принятых сообщений;
-встроенный аккумулятор с контроллером зарядки, и возможность подключения внешнего источника питания;
-принимать сигналы станций работающий минимум в 3х диапазонах 490кГц, 518 кГц, 4209,5 кГц;
- иметь встроенную антенну, и разъем для подключения внешней антенны;
-иметь встроенные часы, для активизации приемника только на время приема сообщений, это позволит существенно увеличить время работы от аккумулятора.
Структурная схема представлена на рисунке 2[1].
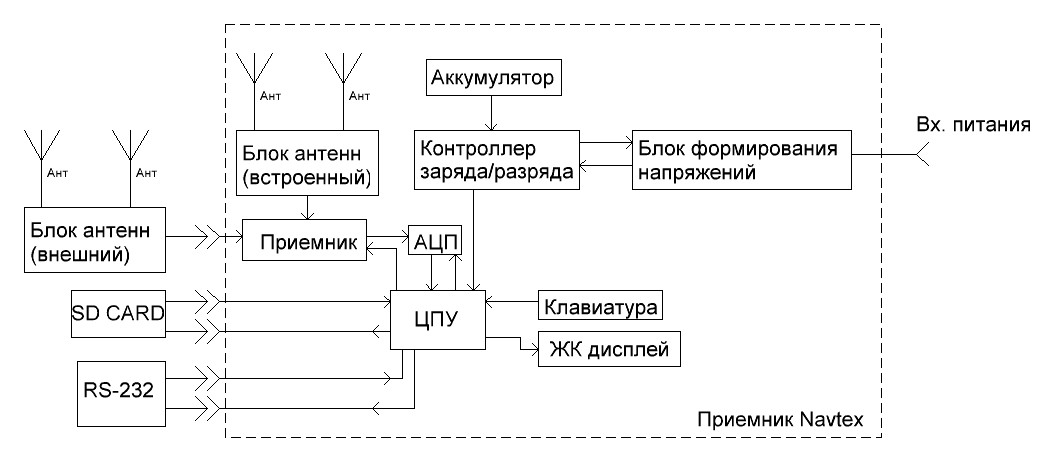
Рисунок 1.2 – Структурная схема устройства
Возможные причины отказов приемника:
1. Выход из строя какого-либо из элементов приемника.
2. Не своевременное обслуживание.
Раздел 2
Расчет функции готовности и коэффициента готовности
| Рисунок 2.1 – Граф состояний |
Вводим исходные данные:
Интенсивность отказов: 
Интенсивность восстановления: 
Составляем систему дифференциальных уравнений Колмогорова-Чепмена:

Находим вероятности нахождения системы в каждом из этих состояний в стационарном режиме функционирования, при этом заменяем одно из уравнений нормировочным условием: сумма вероятностей всех состояний Марковского процесса равна 1, что означает, что в каждый момент времени система обязательно находится в одном из состояний: 
Находим функцию готовности системы и коэффициент готовности. Функция готовности системы определяется как сумма всех вероятностей нахождения системы в работоспособных состояниях:

| Рисунок 2.2 – Функция готовности системы |

Таким образом, полученный коэффициент готовности системы K=0,497 не соответствует требуемому K=0,994. Чтобы получить требуемый коэффициент готовности рекомендуется добавить мероприятия по проведению профилактического обслуживания, а также использовать резервирование системы.
2.2 Оптимизация параметров системы
Исходные данные:

Строим систему уравнений в матричном виде:

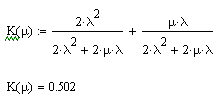
Коэффициент готовности системы:

где µ - интенсивность проведения аварийных работ; λ – интенсивность внезапных отказов.
Выражаем через оптимизируемые параметры условный экономический ресурс ТО:

Функция Лагранжа имеет вид:

где С0 – денежный ресурс; с1 – стоимость аварийно-восстановительных работ.
Задаем начальные значения управляемых параметров:

Вводим ограничения на искомые параметры ТЭ:

Получаем решение оптимизационной задачи:

Значение коэффициента готовности системы при оптимальных параметрах ТЭ:
Таким образом полученный коэффициент готовности после оптимизации параметров системы также не удовлетворяет требуемому, что говорит нам о том что нужно вводить в систему дополнительные мероприятия ТО.
Раздел 3
3.1 Определение оптимального времени профилактического обслуживания всей системы с учетом затрат на профилактическое обслуживание оборудования и восстановительные работы.
Определяем оптимальную периодичность проведения ТО при явных отказах:

где С1,С2 – затраты на ТО; Тsr – наработка на отказ.
Вероятность безотказной работы:

Интенсивность постепенных отказов:

Таким образом, с учетом затрат на обслуживание рассматриваемой системы, оптимальная периодичность проведения ТО при явных отказах составляет 175,781 час.
Если в системе наблюдаются скрытые отказы, то обнаружить их можно только путем проведения ТО. Расчет оптимальной периодичности проведения ТО при скрытых отказах:

Таким образом, с учетом затрат на обслуживание рассматриваемой системы, оптимальная периодичность проведения ТО при скрытых отказах составляет 123,747 час.
Раздел 4