РЕФЕРАТ
по дисциплине «Системы оптимального управления энергоустановками АЭС»
Тема: «Оптимальные системы автоматизированного управления
исполнительным механизмом»
Выполнил
студент гр. В51901/11: И.С.Васецкий
(подпись)
Проверил
проф.: А.Е. Серов
(подпись)
Сосновый Бор
2016
ПЛАН
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ.. 3
1. Примеры оптимального управления в технических системах. 9
2. Классическая форма ВМУ.. 14
ЗАКЛЮЧЕНИЕ.. 16
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ.. 18
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ
| АЭС | – атомная электрическая станция; |
| АСУ | – автоматизированная система управления; |
| АСР | – автоматическая система регулирования; |
| ИМ | – исполнительный механизм; |
| ОУ | – объект управления; |
| ППС | – прикладная программная среда; |
| ПФ | – передаточная (ые) фнкция (и); |
| РД | – редуктор; |
| РО | – рабочий орган; |
| САУ | – система автоматического управления; |
| ТАР | – теория автоматического регулирования; |
| ТАУ | – теория автоматического управления; |
| ТП | – тиристорный преобразователь; |
| УУ | – устройство управления; |
| ЭД | – электродвигатель. |
1)
Примеры оптимального управления в технических системах










Задача о максимальной точности воспроизведения.
При серийном производстве изделий необходимо, чтобы они как можно более точно соответствовали образцу. Однако различные внешние случайные факторы являются причиной возникновения отклонений от образца. Класс задач оптимального управления, позволяющих определить режимы производства изделий с наименьшим отклонением от образцов, называется задачами о максимальной точности воспроизведения. Сформулируем такую задачу.
Пусть на УУ подаётся задающее воздействие  , которое воспроизводится на выходе ОУ, т.е.
, которое воспроизводится на выходе ОУ, т.е.  . На ОУ действует случайное возмущение
. На ОУ действует случайное возмущение  , вероятные свойства которого известны. Такое возмущение приведёт к отклонению выходной переменной
, вероятные свойства которого известны. Такое возмущение приведёт к отклонению выходной переменной  от заданной величины на ошибку
от заданной величины на ошибку  , т.е.
, т.е.  . Необходимо подобрать такую импульсную характеристику
. Необходимо подобрать такую импульсную характеристику  УУ, что бы среднеквадратичная ошибка выходного сигнала , вызванная возмущением , была бы минимальной.
УУ, что бы среднеквадратичная ошибка выходного сигнала , вызванная возмущением , была бы минимальной.
Критерий оптимальности для такой задачи можно записать следующим образом:
 .
.
Задача об оптимизации конечного состояния.
Рассмотрим на примере ракеты. Пусть ракета массой  с запасом топлива
с запасом топлива  поднимается на высоту
поднимается на высоту  , расходуя топливо с секундным расходом
, расходуя топливо с секундным расходом  . Учитывая ускорение свободного падения
. Учитывая ускорение свободного падения  , силу лобового сопротивления
, силу лобового сопротивления  и коэффициента пропорциональности между тягой двигателя и расходом топлива
и коэффициента пропорциональности между тягой двигателя и расходом топлива  , подобрать такой секундный расход топлива , чтобы ракета за конечное время
, подобрать такой секундный расход топлива , чтобы ракета за конечное время  (неизвестное) поднималась на максимальную высоту
(неизвестное) поднималась на максимальную высоту  .
.
Обозначим высоту  , скорость полета
, скорость полета  , массу
, массу  .
.
Тогда  ;
;
Согласно второму закону Ньютона ускорение
 .
.
Запишем это выражение с учётом условия задачи:
 .
.
Заменим физические величины переменными состояния
 ;
;
 .
.
Критерий оптимальности можно записать в виде условия:

при дополнительных ограничениях
 ;
;  ;
;  ;
;  .
.
Тогда задачу оптимизации конечного состояния можно сформулировать следующим образом: в области допустимых управлений  найти такое управление
найти такое управление  , чтобы одна из переменных состояния (например, высота ) в конечный момент времени принимала максимальное значение. Задачи такого типа называются терминальными.
, чтобы одна из переменных состояния (например, высота ) в конечный момент времени принимала максимальное значение. Задачи такого типа называются терминальными.
Задача о минимальном расходе топлива.
Иначе предыдущую задачу можно сформулировать таким образом: найти такой расход топлива  , при ограничении , при котором количество топлива, затраченное на подъём на высоту , оказалось бы минимальным, т.е.
, при ограничении , при котором количество топлива, затраченное на подъём на высоту , оказалось бы минимальным, т.е.
 .
.
Задача о минимальных энергетических затратах.
Пусть под действием управления  объект перемещается из начального в конечное состояние и описывается уравнениями состояния
объект перемещается из начального в конечное состояние и описывается уравнениями состояния  ;
;  . Необходимо найти такое управляющее воздействие
. Необходимо найти такое управляющее воздействие  , чтобы энергетические затраты на перемещение объекта за время были бы минимальными.
, чтобы энергетические затраты на перемещение объекта за время были бы минимальными.
Критерий оптимальности в этом случае имеет вид:
 .
.
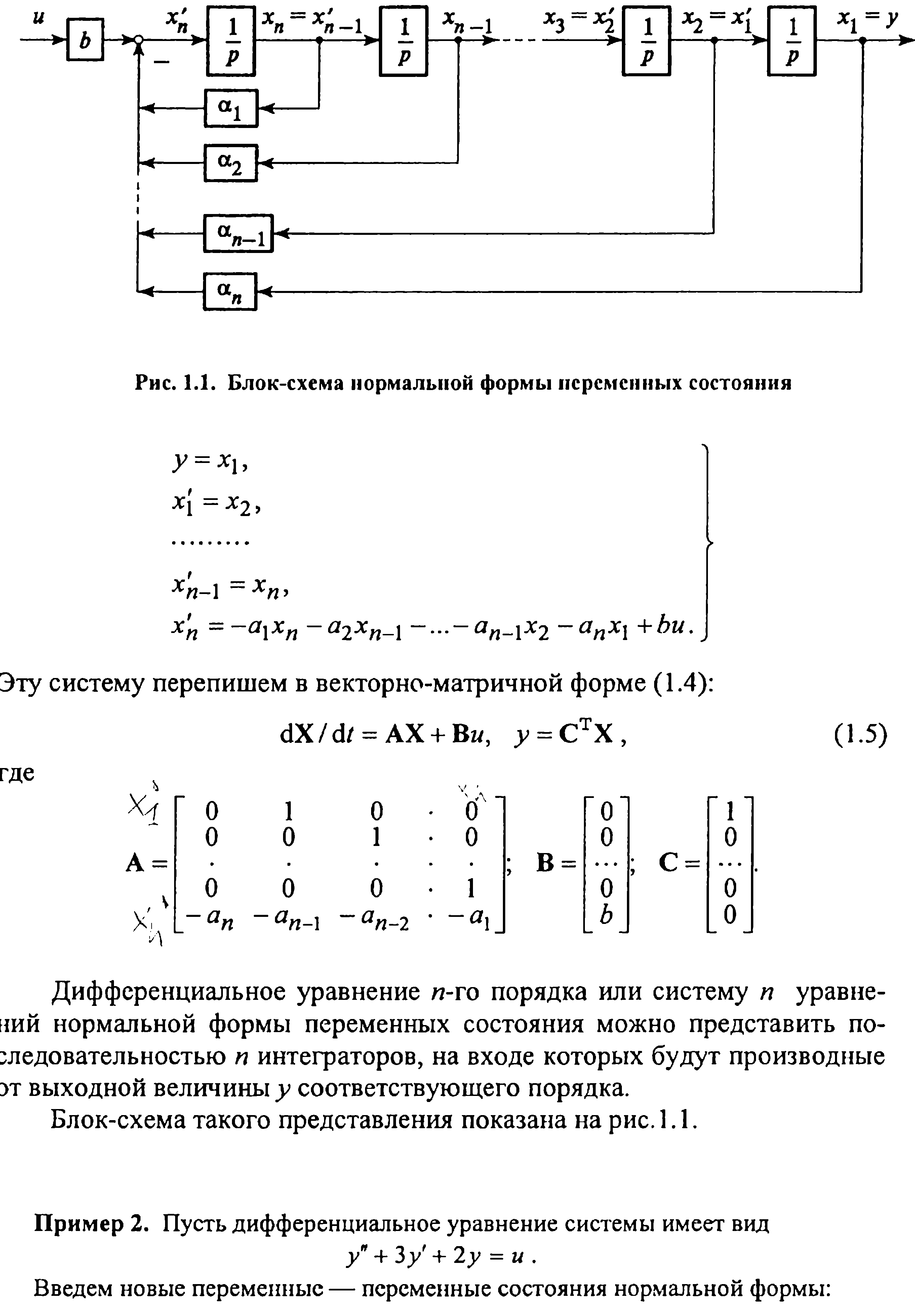
2) Классическая форма ВМУ




ЗАКЛЮЧЕНИЕ
Современные идеи оптимального управления распространяются не только на технические объекты и технологические процессы в промышленности, но и на такие области, как организация и управление производством, экономика, менеджмент, биология, военное дело и даже политика. В нашем случае круг сужен до вопросов теории оптимального управления применительно к технике.
Современные промышленные производства характеризуются значительной сложностью и высокой интенсивностью технологических процессов, возросшими требованиями к экологической безопасности и надежности работы производственного оборудования. Исключительно важное народно-хозяйственное значение приобретает эксплуатация промышленного оборудования в режимах, близких к предельным возможностям, и построение систем наилучших (оптимальных) по какому-либо техническому или экономическому критерию. Особое место среди такого класса систем занимают системы, оптимальные по быстродействию и точности, функционирование которых обеспечивается релейными (разрывными) управлениями. Сокращение продолжительности переходных процессов при регулировании многих технологических объектов повышает производительность агрегатов, а увеличение точности отработки системой задающих воздействий улучшает качество продукции, что позволяет получить значительный экономический эффект. По мере уменьшения времени изготовления и улучшения качества выпускаемой продукции проблема синтеза релейных систем, оптимальных по точности и времени управления электроприводами становится все более актуальной.
Неослабевающий интерес к релейным управлениям (работы Я.З. Цыпкина, В.А. Олейникова, Ю.А. Борцова и др.) объясняется тем, что такие системы обладают рядом замечательных свойств: инвариантность к внешним возмущениям и низкая чувствительность к параметрическим возмущениям. Известно, что возмущающие воздействия, приложенные к объекту и не превышающие по модулю соответствующих релейных управлений, не вызывают отклонений фазовых координат объекта (работы М.В. Меерова, С.В. Емельянова, Е.А. Барбашина, В.И. Уткина и др.). Следствием реализации в релейной системе бесконечно большого коэффициента усиления с помощью конечных управляющих воздействий является снижение установившейся ошибки и повышение точности до оптимального значения. Известно также, что только релейный закон управления может обеспечить идеальное воспроизведение любого допустимого входного воздействия (работы А.А. Фельдбаума, А.А. Павлова, А. С. Клюева и др.), причем слежение за входным сигналом происходит в скользящем режиме. К достоинствам релейных систем следует также отнести простоту конструкции, настройки и эксплуатации.
С теоретической точки зрения релейные оптимальные системы относятся к классу существенно нелинейных, трудности анализа и синтеза которых широко известны. Несмотря на обилие теоретических работ по оптимальному управлению, если оценивать приведенные в них результаты с практической точки зрения, то их, к сожалению, следует признать весьма скромными. Как отмечает А. А. Колесников в книге Синергетическая теория управления. - М.: Энергоатомиздат, 1994. - 344 с. "...ситуация в этой области приняла в настоящее время угрожающий и, по всем признакам, кризисный характер" Авторы справочника по теории автоматического управления (ТАУ) под редакцией А.А. Красовского поясняют, что "...в развитии современной ТАУ (СТАУ) с точки зрения практики далеко не все обстоит благополучно. Классическую ТАУ в основном создавали инженеры для инженеров. СТАУ создают в основном математики для инженеров и во все большей мере математики для математиков. Последнее с точки зрения практики вызывает определенное беспокойство...". Авторы монографии Современная прикладная теория управления. Под ред. А.А. Колесникова - М: Изд-во ТРТУ, 2000. - 400 с. связывают пути выхода из кризисной ситуации с тем, что "в самые последние годы появились новые фундаментальные направления в теории и технике управления. Их развитие может приобрести важное практическое значение. К таким направлениям можно отнести физическую теорию управления, синергетический подход к проблемам управления..." и далее они отмечают, что "Основное внимание ученых и политиков все в большей мере концентрируется на фундаментальных проблемах управления, связанных с ресурсосберегающими технологиями".
Итак, в настоящее время не существует законченных общетеоретических методов исследования и аналитического конструирования высокоточных, быстродействующих и энергосберегающих систем управления нелинейными электромеханическими объектами. Причинами этого являются: невыполнение для них принципа суперпозиции; разнообразие классов функций, используемых для описания динамики нелинейных ОУ и СУ; разнообразие требований к качеству процессов в различных режимах функционирования СУ; различные уровни сложности управляемых объектов, характеризуемые многомерностью, многосвязностью, многоконтурностью и т.д.; отсутствие общего математического аппарата для аналитического решения систем нелинейных дифференциальных уравнений. Для многих практически важных классов электромеханических нелинейных объектов отсутствуют теоретически законченные, относительно простые, инженерные методы проектирования систем управления. Следовательно, в данном направлении поле деятельности для развития и разработок весьма велико.