Лаборатория механики
ЛАБОРАТОРНАЯ РАБОТА № 14
ИЗУЧЕНИЕ ГИРОСКОПА
Тверь
Цель работы: изучение особенностей движения гироскопа и определение угловой скорости прецессии.
Оборудование: установка для изучения гироскопического эффекта.
КРАТКАЯ ТЕОРИЯ
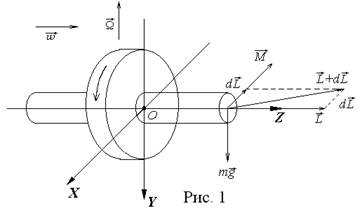 Гироскопом называется симметричное твердое тело, угловая скорость вращения ω (рис. 1) которого вокруг оси симметрии значительно превосходит по модулю угловую скорость Ω вращения самой оси симметрии: ω>>Ω. В современных гироскопических приборах угловая скорость Ω собственного вращения достигает иногда 40000-50000 об/мин, а угловая скорость
Гироскопом называется симметричное твердое тело, угловая скорость вращения ω (рис. 1) которого вокруг оси симметрии значительно превосходит по модулю угловую скорость Ω вращения самой оси симметрии: ω>>Ω. В современных гироскопических приборах угловая скорость Ω собственного вращения достигает иногда 40000-50000 об/мин, а угловая скорость  вращения оси гироскопа не превышает нескольких оборотов в минуту. Следовательно, с достаточной для практики точностью можно считать, что вектор момента импульса гироскопа совпадает с его осью. На этом допущении основана приближенная теория гироскопа.
вращения оси гироскопа не превышает нескольких оборотов в минуту. Следовательно, с достаточной для практики точностью можно считать, что вектор момента импульса гироскопа совпадает с его осью. На этом допущении основана приближенная теория гироскопа.
В технике гироскоп широко применяется в инерциальных навигационных приборах (гирокомпасах). Свободно подвешенный в кардановом подвесе (три степени свободы) гироскоп не изменяет своего момента импульса вследствие вращения Земли или движения самолета, на котором он установлен. Поэтому ось вращающегося тела всегда будет сохранять определенное направление в пространстве. Разумеется гирокомпас сложнее обычного магнитного компаса и требует задания первоначального положения оси вращения, однако гирокомпас свободен от многих недостатков магнитного компаса, в частности гирокомпас не подвержен влиянию со стороны магнитных аномалий Земли.
Чтобы гироскоп сохранял направление оси вращения, совпадающее с его осью симметрии и расположенной в горизонтальной плоскости, волчок должен быть уравновешен по результирующему моменту внешних сил (силы тяжести). В этом случае центр масс волчка должен находиться на вертикальной оси вращения. Если же равновесие по результирующему моменту нарушено (центр масс смещен на  ), то ось вращения гироскопа начнет поворачиваться, но не в вертикальной плоскости, как этого можно было бы ожидать, а в горизонтальной, в направлении момента силы тяжести. Такое вращение оси симметрии (z) относительно вертикальной оси (y) называется прецессией гироскопа.
), то ось вращения гироскопа начнет поворачиваться, но не в вертикальной плоскости, как этого можно было бы ожидать, а в горизонтальной, в направлении момента силы тяжести. Такое вращение оси симметрии (z) относительно вертикальной оси (y) называется прецессией гироскопа.
ОБЪЯСНЕНИЕ ЯВЛЕНИЯ ПРЕЦЕССИИ
Если гироскоп вращается с угловой скоростью  , то он будет обладать моментом импульса
, то он будет обладать моментом импульса  , где Iz - момент инерции вращающейся части гироскопа. По основному закону динамики вращательного движения, скорость изменения момента импульса
, где Iz - момент инерции вращающейся части гироскопа. По основному закону динамики вращательного движения, скорость изменения момента импульса  равна моменту внешних сил
равна моменту внешних сил  :
:
 . (1)
. (1)
В нашем случае момент внешних сил создается дополнительным грузиком (противовесом). Если гироскоп уравновешен (плечо l силы mg равно нулю), то и М =0. Соответственно,
 .
.
В этом случае прецессия не будет наблюдаться, т. е. вектор угловой скорости сохраняет свое направление. В таком уравновешенном состоянии наш гироскоп является моделью гирокомпаса.
Если же равновесие нарушено ( ), то вектор
), то вектор  получит некоторое приращение
получит некоторое приращение  . Однако модуль вектора
. Однако модуль вектора  , а
, а 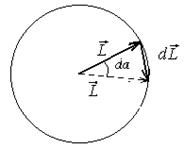
 . Если также учесть, что
. Если также учесть, что  , то заключаем, что и
, то заключаем, что и  , т.е. конец вектора будет вращаться по окружности с некоторой угловой скоростью Ω, которая называется угловой
, т.е. конец вектора будет вращаться по окружности с некоторой угловой скоростью Ω, которая называется угловой  скоростью прецессии (рис. 2).
скоростью прецессии (рис. 2).
Пусть за время dt вектор повернулся на угол dα,
тогда dL=dα·L.
Здесь и в дальнейшем соотношения записываются в скалярной форме. С учетом (1), для угловой скорости прецессии Ω окончательно находим
 . (2)
. (2)
Механическая конструкция прибора
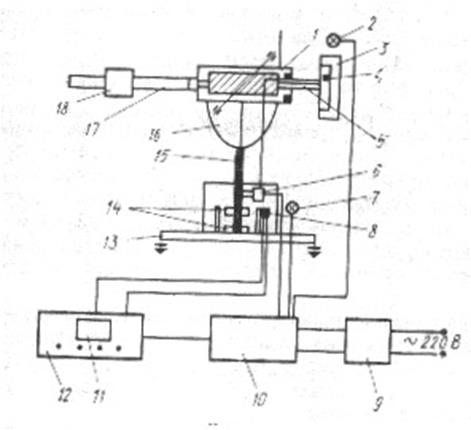
В данной работе в качестве гироскопа используется ротор 1 асинхронного электродвигателя, частота вращения которого может достигать  об/мин (рис). На ось двигателя 5 насажен массивный фигурный стальной маховик 3. С противоположной стороны на статоре двигателя укреплен стержень с делениями 17 и конргрузом 18. Двигатель устанавливается на опорной вилке 16 и может свободно поворачиваться в ней вокруг горизонтальной оси. В свою очередь, опорная вилка вместе с гироскопом устанавливается на основании 13. Гироскоп может вращаться вокруг вертикальной оси. С этой целью ось 15 крепится в двух опорных подшипниках 14.
об/мин (рис). На ось двигателя 5 насажен массивный фигурный стальной маховик 3. С противоположной стороны на статоре двигателя укреплен стержень с делениями 17 и конргрузом 18. Двигатель устанавливается на опорной вилке 16 и может свободно поворачиваться в ней вокруг горизонтальной оси. В свою очередь, опорная вилка вместе с гироскопом устанавливается на основании 13. Гироскоп может вращаться вокруг вертикальной оси. С этой целью ось 15 крепится в двух опорных подшипниках 14.
На вертикальной оси на изоляторах укреплены скользящие электроконтакты 6 в виде щеток для подвода электропитания к электродвигателю.
Маховик и вертикальная ось снабжены специальными дисками, в которых по периферии сделаны равномерные прорези-щели, служащие совместно с источниками света 7 и 2 и фотоприемниками 8 и 4 и датчиками при измерении  и
и  .
.
Электрические сигналы с фотоприемников поступают в измерительное устройство – электронный секундомер 12.
Измерение силы тока в обмотке возбуждения электродвигателя, пропорциональной , производится прибором 11, установленным на передней панели электронного секундомера. Питание электродвигателя и электронного секундомера осуществляется от блока питания 10, включаемого в сеть через стабилизатор напряжения 9.