Конструктивно ВТ выполняют так же, как АД с фазным ротором. На статоре и роторе ВТ размещены по две взаимно перпендикулярные обмотки. Ротор поворачивают с помощью точного редукторного механизма. Редуктор со шкалами грубого и точного отсчета встраивают в корпус ВТ или изготовляют отдельно и соединяют с валом ВТ.
В соответствии со схемой соединения обмоток различают:
· синусно-косинусные вращающиеся трансформаторы (СКВТ);
· линейные вращающиеся трансформаторы (ЛВТ).
Схема соединения обмоток СКВТ показана на рисунке 8.

Рисунок 8 Рисунок 9
Напряжение питания U1 подано на одну обмотку статора. С роторных обмоток снимаются два выходных сигнала U2 и U3, изменяющиеся соответственно по закону синуса и косинуса в функции угла поворота ротора. Если роторные обмотки подключить к каким-нибудь измерительным цепям, то по обмоткам пойдут токи нагрузки. Под влиянием токов нагрузки синусная и косинусная зависимости искажаются. Для устранения таких искажений выполняются так называемые операции симметрирования ВТ, заключающиеся в подборе соответствующих сопротивлений R1 (первичное симметрирование) и R2, R3 (вторичное симметрирование).
Выходные напряжения вторичных обмоток СКВТ могут быть записаны в виде

 .
.
Коэффициент пропорциональности k зависит от соотношения витков W2/W1 = W3/W1 и при выполнении симметрирования не зависит от угла поворота α (обычно W2 = W3).
Схема соединения обмоток ЛВТ показана на рисунке 9. Зависимость выходного напряжения U2 от угла поворота ротора имеет вид

Для малых углов α можно принять  , а
, а  , и зависимостьU2 = ƒ(α) принимает вид
, и зависимостьU2 = ƒ(α) принимает вид
 ,
,
т.е. выходное напряжение имеет линейную зависимость от угла α. Относительная приведенная погрешность ЛВТ при соответствующем выборе обмоточных данных в диапазоне углов α до 50° может не превышать 0,05%.
Применение ВТ. Вращающиеся (поворотные) трансформаторы применяют в автоматических устройствах, маломощных следящих системах, вычислительной технике для получения выходных напряжений пропорциональных функциям угла поворота ротора α, например, sinα, cosα или самому углу α.
ВТ используют также в качестве построителей для решения геометрических и тригонометрических задач.
В автоматических устройствах ВТ работают как в режиме поворота ротора в пределах определенных ограничений угла, так и при непрерывном вращении.
Сельсины
Для дистанционных передач угловых перемещений широко применяются также электромашинные элементы автоматики – сельсины. Они имеют однофазную обмотку на статоре и трехфазную обмотку синхронизации на роторе (возможно и обратное расположение обмоток). Сельсины могут работать:
· в индикаторном режиме;
· в трансформаторном режиме.
На передающей стороне устанавливается сельсин-датчик, а на приемной – сельсин-приемник, который должен автоматически повторять угол поворота сельсина-датчика.
В индикаторной схеме включения сельсинов (рисунок 10) обмотки возбуждения сельсина-датчика и сельсина-приемника подключаются к сети переменного тока, а обмотки синхронизации обоих сельсинов соединяются друг с другом проводами линии связи.

Рисунок 10
ЭДС в каждой из фаз обмотки синхронизации изменяется пропорционально косинусу угла между осью обмотки возбуждения и осью этой фазы. ЭДС фаз синхронизации датчика, ротор которого повернут на угол α, будут определяться уравнениями
 ;
;
 ;
;
 .
.
ЭДС фаз синхронизации приемника, ротор которого повернут на угол β, будут определяться уравнениями
 ;
;
 ;
;
 .
.
Под действием разности этих ЭДС по проводам линии связи между обмотками синхронизации пойдут токи
 ;
;
 ;
;
 ,
,
где Z – сопротивление фаз приемника, датчика и линии связи.
В сельсине-приемнике взаимодействие этих токов с магнитным потоком возбуждения вызывает появление вращающего момента.
 ,
,
где kМ – постоянный коэффициент, определяемый обмоточными и конструктивными данными сельсина.
Вращающий момент действует и на вал сельсина-датчика, однако, его угол поворота задан механизмом или чувствительным элементом, угловое перемещение которого подлежит контролю.
Для сельсинной индикаторной схемы очень важной характеристикой является величина удельного синхронизирующего момента, т.е. момента на 1° рассогласования.
Для сельсинов, используемых в промышленности, эта величина составляет
(4…50)∙10-4 Нм.
Для повышения вращающего момента используется трансформаторная схема включения сельсинов.
В этой схеме обмотка возбуждения сельсина-приемника не подключается к сети, а с нее снимается напряжение, которое пропорционально синусу угла рассогласования. Это напряжение подается на усилитель, который питает электродвигатель, приводящий через редуктор сельсин-приемник в согласованное с сельсином-датчиком положение. Одновременно в требуемое положение устанавливается и нагрузка – тот производственный механизм, угловым перемещением которого требуется управлять на расстоянии.
Такие автоматические устройства называются следящими системами.
Наряду с контактными сельсинами большое распространение получили бесконтактные сельсины.
В контактных сельсинах подключение обмоток ротора во внешнюю цепь осуществляется с помощью контактных колец и щеток.
В бесконтактных сельсинах обмотки возбуждения и синхронизации размещены на статоре, а изменение магнитной связи между ними по синусоидальному закону обеспечивается с помощью безобмоточного ротора с неодинаковым магнитным сопротивлением по взаимно перпендикулярным осям. Надежность бесконтактных сельсинов существенно выше, чем контактных.
Магнитоупругие датчики
Принцип действия магнитоупругих датчиков основан на эффекте магнитоупругости – физическом явлении, проявляющемся в виде изменения магнитной проницаемости материала в зависимости от механических напряжений в нем.
Магнитоупругие датчики используются для измерения силовых параметров:
· усилий;
· давлений;
· крутящих и изгибающих моментов;
· механических напряжений и т.д.
Конструктивно магнитоупругие датчики представляют магнитопровод с одной или несколькими обмотками. Магнитное сопротивление сердечника
 ,
,
где l и S – длина и площадь сечения сердечника. Если к сердечнику приложено механическое усилие F, то магнитная проницаемость μ изменится. Следовательно, изменятся и магнитное сопротивление сердечника, и индуктивность обмотки на сердечнике.
Так же как и индуктивные датчики, магнитоупругие датчики могут быть использованы в виде одинарных (рисунок 11,а), трансформаторных (рисунок 11,б), дифференциально-трансформаторных (рисунок 11,в).
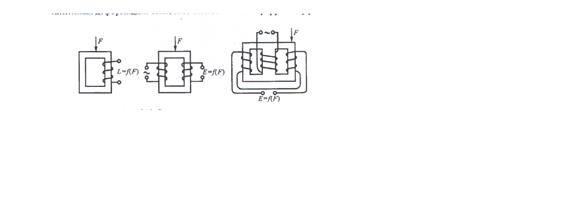
Рисунок 11
Зависимость магнитной проницаемости от механических напряжений имеет нелинейный характер. Связано это как с нелинейностью кривой намагничивания, так и с нелинейной зависимостью деформаций от усилия. Нелинейность магнитоупругого эффекта выражена очень сильно. Например, в слабых магнитных полях магнитная проницаемость под действием механических напряжений возрастает, а в сильных полях – уменьшается. Однако, при определенных значениях напряженности магнитного поля Н в сердечнике можно получить близкую к линейной зависимость изменения магнитной проницаемости Δμ сердечника от относительной деформации Δl/l или нормального механического напряжения σ в зоне линейных деформаций. Наиболее заметен магнитоупругий эффект в пермаллоевых (железокобальтовых и железоникелевых) сплавах.

Рисунок 12
На рисунке 12 показана зависимость относительной магнитной проницаемости Δμ/μ от изменения механического напряжения σ. Относительная деформация Δl/l в зоне упругих деформаций связана с механическим напряжением σ через модуль упругости Е:
 .
.
Чувствительность магнитоупругого датчика определяется по формуле
 ;
;
она может достигать значений 200-300. Зависимость индуктивности от механического напряжения σ для магнитоупругого датчика по рисунку 11,а показана на рисунке 13.
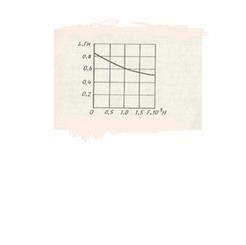
Рисунок 13
К достоинствам магнитоупругих датчиков следует отнести высокую чувствительность и возможность измерения больших усилий (до нескольких тысяч тонн). В то же время магнитоупругие датчики имеют и следующие серьезные недостатки:
· наличие температурной погрешности, вызванной влиянием температуры окружающей среды на магнитные свойства сердечника;
· наличие погрешности, вызванной влиянием гистерезиса (как магнитного, так и механического, связанного с остаточной деформацией);
· наличие погрешности, вызванной колебаниями напряжения питания.
Следует отметить, что в магнитоупругих датчиках имеет место и еще одно физическое явление – магнитострикционный эффект. Его действие обратно магнитоупругому эффекту: ферромагнитное тело, помещенное в магнитное поле, изменяет свои геометрические размеры, т.е. в нем появляются механические деформации.
В переменном магнитном поле и деформации будут переменными. А так как знак деформации не зависит от направления магнитного поля, то частота колебаний деформации будет в два раза выше частоты переменного тока. На этом принципе работают, например, магнитострикционные излучатели ультразвуковых колебаний.
Индукционные датчики
Индукционные датчики предназначены для преобразования скорости линейных и угловых перемещений в ЭДС. Они относятся к датчикам генераторного типа. Принцип действия индукционных датчиков основан на законе электромагнитной индукции. Выходным сигналом индукционных датчиков является ЭДС, которая пропорциональна скорости изменения магнитного потока, пронизывающего витки катушки. Это изменение происходит за счет перемещения катушки в постоянном магнитном поле или за счет вращения ферромагнитного индуктора относительно неподвижной катушки.
Основным отличием индукционных датчиков от индуктивных является то, что в них используется постоянное магнитное поле, а не переменное (питание индуктивных датчиков осуществляется от сети переменного тока). Постоянное магнитное поле в индукционных датчиках создается двумя способами:
· постоянными магнитами;
· катушкой, обтекаемой постоянным током.
На рисунке 14,а показана схема датчика с обмоткой W2, размещенной в воздушном зазоре, в котором постоянный магнитный поток Ф создается катушкой W1, включенной на постоянное напряжение U=.

Рисунок 14
При перемещении катушки в магнитном поле в ней индуцируется ЭДС, пропорциональная скорости перемещения:
 ,
,
где k – коэффициент пропорциональности, зависящий от числа витков W2 и конструктивных параметров датчика.
На рисунке 14,б показан датчик, в котором постоянный магнитный поток создается с помощью постоянного магнита с полюсными наконечниками. ЭДС, индуцируемая во вращающейся катушке, пропорциональна скорости вращения Ω:
 .
.
В обоих этих датчиках катушки подвижны, поэтому для отвода от них выходного сигнала (ЭДС) необходимы гибкие токоподводы или контактные кольца со щетками.
Индукционный датчик может быть выполнен и другой конструкции: с неподвижной катушкой и вращающимся постоянным магнитом (рисунок 14,в). Надежность при этом повышается за счет отсутствия скользящего контакта.
Возможен и другой способ повышения надежности датчика по схеме (рисунок 14,б): и катушка, и постоянный магнит неподвижны, а в зазоре между ними вращается ферромагнитное кольцо с вырезами (рисунок 14,г) или иной элемент, имеющий существенно разную магнитную проводимость по взаимно перпендикулярным осям. При вращении изменяется поток, пронизывающий плоскость катушки.
В датчиках (рисунок 14, б,в,г) в качестве выходного сигнала можно использовать частоту ЭДС. Принцип их действия по существу такой же, как у синхронных генераторов. Для измерения частоты вращения используются и специальные электрические машины малой мощности – тахогенераторы.
Тахогенератор постоянного тока (рисунок 15,а) имеет обмотку возбуждения, создающую при питании постоянным током магнитный поток Ф. При вращении якоря в нем создается ЭДС, пропорциональная частоте вращения n:
 , где k – постоянная, определяемая конструкцией.
, где k – постоянная, определяемая конструкцией.
С помощью коллектора и щеток выходной сигнал подается на нагрузку в виде выпрямленного напряжения.
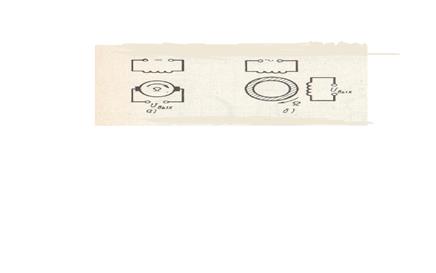
Рисунок 15
Тахогенератор переменного тока (рисунок 15,б) имеет на статоре две обмотки, сдвинутые одна относительно другой на 90 электрических градуса. Одна обмотка включается в сеть переменного тока. При вращении ротора, выполненного в виде тонкостенного электропроводящего цилиндра, в другой обмотке наводится переменная ЭДС, которая пропорциональна частоте вращения n. Для повышения температурной стабильности в качестве материала полого ротора используется константан.
Тахогенераторы обладают высокой чувствительностью и мощностью выходного сигнала. Общим недостатком всех генераторных датчиков является зависимость выходного сигнала от сопротивления нагрузки.