Рассмотрим кольцевой рабочий орган 1 (рисунок 3.5). Систему координат OXYZ выберем следующим образом. Ось OZ вертикальна поверхности почвы и проходит через центр С кольцевого рабочего органа. Ось ОХ совпадает с направлением поступательного движения. Кольцо касается дна борозды в точке О - начале системы координат. Плоскость вращения кольца отклонена от направления движения на угол а. Выберем дополнительную систему координат OX'Y'Z, у которой ОХ' и OY' отклонены соответственно от осей ОХ и OY на угол а. Пусть центр кольца С переместится по оси ОХ на расстояние S. Разложим перемещение S на две составляющие Sk и Sc. Sk представляет перемещение вдоль оси ОХ', а Sc- внаправлении, перпендикулярном ОХ'. Рассмотрим движение кольца в системе координат OX'Y'Z. Пусть при перемещении центра кольца по оси ОХ' на расстояние Sk радиус-вектор СМ повернется на угол Θ (рисунок 3.11). Тогда
S k = Θ·R/i, (4)
где i - характеризует проскальзывание кольца относительно дна борозды по оси ОХ', Oےi <l.
Ha рисунках 3.12 и 3.13 представлены траектории движения точки М поверхности кольцевого рабочего органа в зависимости от угла атаки а и коэффициента
скольжения i за один его оборот. Увеличение угла атаки приводит к удлинению длины траектории. При этом также увеличивается ширина захвата b1 рабочего органа. При уменьшении коэффициента сцепления i удлиняется длина траектории, но ширина захвата рабочего органа остается без изменений.
Определим угол γ между осью ОХ и касательными к траектории движения
кольцевого рабочего органа в плоскости ХОY (рисунок 17, б):
tgy = dy/dx (12)
где dy u dx- дифференциалы функций Yи Х.Из формулы (8)
dy = —R·sin Θ · sina;
dx = R /(i · cos a)-R·sin Θ· cos a.
Подставив полученное в (3.76), имеем
tgγ= i·sina·cos a· sinΘ/ i·cos2 a·sinΘ-1 (13)
На рисунке 19 приведены графики изменения угла γ в период нахождения элемента рабочего органа в почве. Наибольшая абсолютная величина угла γ достигается при Θ = 90°. При увеличении и уменьшении Θ абсолютная величина γ уменьшается.
При уменьшении угла атаки а максимальная величина | γ| увеличивается.
Отклонение Θ от 90° приводит к уменьшению значений | γ |. С уменьшением
коэффициента i угол | γ| также уменьшается.
При 0 =90° радиус-вектор СМ перпендикулярен дну борозды и находится в ее середине. Это наиболее характерная рабочая зона кольца. Рассмотрим ее более подробно. При Θ =90° формула (13) приобретает вид


Рисунок 3.13 – Траектория движения точек поверхности кольцевого рабочего органа за один оборот в плоскости YOZ: 1- i =1; α =30°; 2- i =1; α = 10°; 3- i =0,8; α =30°
tgγ= i· sin а · cos а/ i·cos2 a-1 (14)
На рисунке 20 представлены графики изменения угла γ при Θ > =90°. Наибольшие значения | γ |обеспечиваются при i =1. С увеличением угла атаки α значение | γ |возрастает.
При i=1 касательная к траектории движения перпендикулярна плоскости вращения кольца, т.к.
tgγ = -1/tga. (15)
В этом случае кольцевой рабочий орган совершает движение в направлении, перпендикулярном его плоскости.
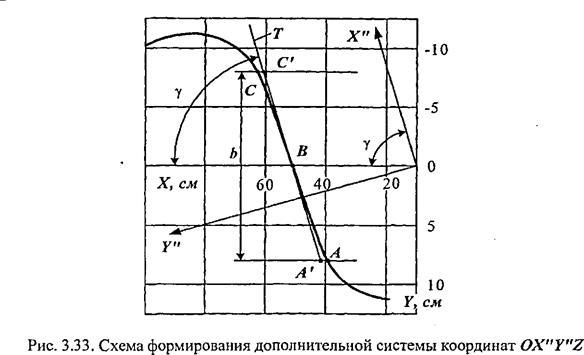
Траектория движения элемента рабочего органа в борозде в плоскости
XOY представляет кривую ABC (рисунок 3.14). Перпендикулярно дну борозды через точку В, соответствующей Θ =90 ° под углом у к оси ОХ проведем секущую плоскость Т. Плоскость пересекает борозду по точкам А'ВС'. Вместо траектории ABC будем рассматривать линию А'ВС' пересечения плоскости Т и дна борозды.
Для этого введем дополнительную систему координат OX"Y"Z, получаемой
 путем поворота системы OXYZ по часовой стрелке на угол γ вокруг оси OZ (рисунок 3.15). В дополнительной системе координат OX"Y"Z формулы (8) для определения координат траектории движения кольцевого рабочего органа примут вид:
путем поворота системы OXYZ по часовой стрелке на угол γ вокруг оси OZ (рисунок 3.15). В дополнительной системе координат OX"Y"Z формулы (8) для определения координат траектории движения кольцевого рабочего органа примут вид:
 X" = Θ ·R· cos γ /(i · cos α) + R· cos Θ · cos(a + γ);
X" = Θ ·R· cos γ /(i · cos α) + R· cos Θ · cos(a + γ);
Y" = Θ ·R·sinγ /(i ·cosa) + R·Cos Θ · sin(a + γ); (16)
Z = R-R·sin Θ.
Ha рисунке 22 представлены линии пересечения дна борозды с плоскостью Т.
Они характеризуют движение рабочего органа в плоскости, когда его элемент находится в почве. Их анализ показывает, что с увеличением угла атаки а возрастает длина формируемого дна борозды элементом рабочего органа. Уменьшение коэффициента i также приводит к увеличению длины формируемого дна борозды.
Важнейшей характеристикой дна борозды является угол его наклона φ к
оси ОХ"(рис. 3.16). Определим его величину
tgφ = dz/dx". (17)

Рисунок 3.15 – Зависимость угла γ от α и с при Θ = 90°
1- i =1,0; 2 - i = 0,8
|

 Из выражения (16) имеем
Из выражения (16) имеем
dz = —R-cos Θ;
dx" = R · cos γ / i· cos a-R· cos(a + γ)-sin Θ.
С учетом полученного
tgφ= i·cosa·cos Θ/ i· cos a·sin Θ · cos (a+γ)—cosγ (18)
В этом случае формула (3.82) приобретает вид
tgφ = -cos Θ/tga. (19)
На рисунке 3.18 приведены графики изменения угла φ в зависимости от X" при различных значениях угла атаки а и коэффициента скольжения i. Из них следует, что с ростом X" величина φ увеличивается от отрицательного до положительного значений. С увеличением угла атаки а темп роста угла φ снижается, кроме того, уменьшаются и абсолютные величины его максимальных значений. Аналогичная картина и при уменьшении коэффициента i. С уменьшением I снижается темп роста угла φ и происходит уменьшение абсолютных величин максимальных значений.
Период нахождения элемента кольца в почве определяется углами Θн и Θ k (рисунок 3.19). Первый из них характеризует положение радиус-вектора СМ в момент вхождения элемента в почву, второй - в момент выхода из почвы. Определим углы Θn и Θk
sin Θn =1-h/R
или Θn = arcsin(1 -h/R), (20)
а Θk =180- Θn. (21)
На рисунке 25 приведены графики зависимости угла Θn от глубины обработки а и радиуса R. Из них следует, что с увеличением глубины обработки почвы а, угол Θn уменьшается, а с увеличением радиуса R - увеличивается.
Определим параметры дна борозды, создаваемой кольцевым рабочим органом.

До сих пор кольцевой рабочий орган представлялся как линия окружности
радиусом R. В общем случае кольцевой рабочий орган представляет тор (рисунок 26) и в дальнейшем следует учитывать объемный характер его формы.
Обозначим радиус средней линии через Rо, радиус окружности, лежащей в поперечном сечении - r, тогда наибольший радиус - R=Ro+r. В плоскости YOZ средняя линия тора представляет эллипс (рисунок 27). Его большая полуось CF=Ro, а малая CD=EA=Ro·Sina. Нижняя точка эллипса F находится на расстоянии OF=r от дна борозды. Уравнение проекции средней линии тора на плоскость YOZ:
 Y~R0 sin а · cos Θ;
Y~R0 sin а · cos Θ;
Z = R-R0-sinΘ. (22)
Каждая точка поверхности тора удалена от средней линии на величину радиуса r. Через точку М' проведем нормаль КМ' к средней линии. Точка К, при длине нормали равной r, является с одной стороны точкой на поверхности тора, с другой - она представляет точку касания элемента поверхности тора с дном борозды. Уравнение нормали
Zм׳-Z= -(Yм׳-Y)/Z'(y), (23)
где Yм׳, Zм׳ - координаты точки М'.
Z'(y) - первая производная функции Z от у,
Z'(y)=dZ/dY=ctg Θ/sina (24)
Полученное уравнение описывает проекцию средней линии или проекцию линии касания кольцевого рабочего органа дна борозды на горизонтальную плоскость. На рисунке 3.23 приведена эта линия LO(B)D.
С другой стороны коэффициент
-1 /Z'(y) = -sina·tg Θ (25)
в формуле (3.87), равен тангенсу угла j наклона нормали к оси OY, т.е.
tgj = - sin а· tg Θ (26)
Проекции нормали КМ' на оси координат
КВ = ΔYk = npоy KM' = r-cosj; (27)
ВМ' =ΔZk= npоy KM' = r · sin j. (28)
На плоскости YOZ координаты точки К— касания рабочей поверхностью рабочего органа дна борозды — получим сложением координат точки М' формула (3.86) и проекций КМ' на оси координат (3.91) и (3.92).
Yk =Y + ΔYk = R0 · sina · cos Θ -r-cos j
Zk=Z + ΔZk =R — R0 sin Θ -r- sinj. (29)
Формулы (29) характеризуют координаты точек касания рабочего органа
с дном борозды, т.е. одновременно они описывают и дно борозды.
Поверхность кольцевого рабочего органа касается образуемого дна борозды по линии LABCN (рисунок 3.21). Эта линия представляет собой проекцию средней линии EFD на поверхность дна борозды. Определим уравнение линии LABCN.
Проекция средней линии тора на горизонтальную плоскость XOY представляет
отрезок ED, отклоненный от оси ОХ из. угол а (рисунок 3.22). Определим координаты ее точек. Их ординаты равны ординатам эллипса в плоскости YOZ и определяются по формуле (22). Абсциссы находим по следующей формуле
X = Y·ctga. (30)

 |

Рисунок 3.22 – Проекции средней линии кольцевого рабочего органа на
плоскости ХOY (а) и YOZ (б)

 Определим координаты точек касания К. Точки К являются проекциями соответствующих точек средней линии на дно борозды, образующие которой параллельны оси ОХ. Поэтому абсциссы точек К и средней линии равны, т.е.
Определим координаты точек касания К. Точки К являются проекциями соответствующих точек средней линии на дно борозды, образующие которой параллельны оси ОХ. Поэтому абсциссы точек К и средней линии равны, т.е.
Xk=X = Y-ctga. (31)
Ординаты точек К в плоскостях XOY и YOZ равны и определяются из уравнения (29). Совокупность выражений (30) и (31) определяют координаты точек линии LABCN касания поверхности рабочего органа дна борозды.
Выразим их через углы Θ и t. Предварительно найдем координаты точек касания в системеХ'ОУ' (рисунок 3.22). После соответствующих преобразований имеем:
X'k = Y(ctga · cos a + sin a)+AYk · sin a;
Y' = AYk ·cosa. (32)
Уравнения (32) определяют проекцию L(B)N линиикасания на горизонтальную плоскость (рисунок 3.23).
Рассмотрим проекцию рабочего органа в плоскости X'OZ (рисунок 3.24). На продолжении радиус-вектора СМ, проведенного под углом Θ по формуле (32) найдем положение точки К. Введем вспомогательную систему координат MX"Y"Z", у которой ось MY" параллельна OY', MZ" проходит через радиус-вектор СМ. Рассмотрим сечение рабочего органа плоскостью Y"MZ" (рисунок 3.25). В сечении рабочий орган представляет окружность радиусом r, центр которого находится от оси вращения рабочего органа на расстоянии CM=Ro. По известной ординате Y"k=Y'k определяем положение точки К на окружности. Тогда
tk=arccos· Y' /r. (33)
Подставив значение Y' получим
tk = arcos(cos j · cos а). (34)
На рисунке 3.26 приведены графики изменения параметра tk от углов Θ и а. С увеличением Θ параметр tk уменьшается. С увеличением угла атаки а пределы изменения tk сужаются. При Θ =90° при любых значениях а параметр tk =90°.
При Θ =180° параметр tk = а, а при Θ =0, tk =180° - а.

 |
tk,0
0 30 60 90 120 Θ,0
Рисунок 3.26 – Зависимости угла /^ от 0 и а:
1 - а = 20°; 2 - а = 30°: 3 - а = 40°
Выводы по главе
Во второй части работы были определены основные методические положения, сформулирована методика определения условий испытаний, методика оценки микрорельефа участка, методика определения характеристики почвы, методика определения плотности почвы, методика определения засоренности почвы сорняками, методика определения показателей качества выполнения технологического процесса, методика определения показателей качества конструкции серийного образца бороны кольцевой секционной «Лидер-БКС-8».
Определены средства измерения и оборудование.
Рассмотрены теоретические предпосылки создания кольцевой бороны.
Приведено обоснование параметров кольцевого катка.
Разработана модель функционирования кольцевых рабочих органов.
Описана кинематика кольцевого рабочего органа.