СРАВНЕНИЕ ПУСКОРЕГУЛИРУЮЩИХ УСТРОЙСТВ
Одним из направлений асинхронного электропривода, является использование силовых преобразователей для регулирования пусковых режимов работы. Известно, что скорость асинхронной машины регулируется изменением напряжения, которое подводится к статору, частота напряжение при этом равна частоте сети. Для регулировки статорного напряжения используются тиристорные регуляторы напряжения (ТРН). Такие регуляторы имеют ряд преимуществ, во первых небольшая стоимость и простота обслуживания, а во вторых большое быстродействие и высокий КПД[1].
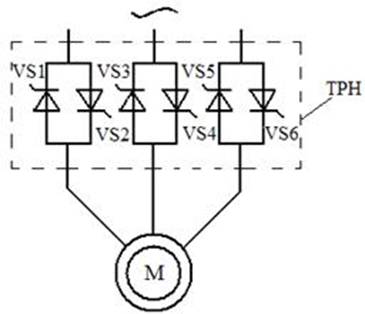 На рисунке а представлен трехфазный ТРН, состоящий из шести тиристоров, которые образуют пары и включены по встречно-параллельной схеме, а все потому, что данная схема обеспечивает протекание тока нагрузки в оба полупериода напряжения сети (U1). Импульсы управления поступают на тиристоры от СИФУ, и она же обеспечивает их сдвиг на угол α. Изменяя его в диапазоне от 0 до 180, мы тем самым регулируем напряжение на статоре, понижая
На рисунке а представлен трехфазный ТРН, состоящий из шести тиристоров, которые образуют пары и включены по встречно-параллельной схеме, а все потому, что данная схема обеспечивает протекание тока нагрузки в оба полупериода напряжения сети (U1). Импульсы управления поступают на тиристоры от СИФУ, и она же обеспечивает их сдвиг на угол α. Изменяя его в диапазоне от 0 до 180, мы тем самым регулируем напряжение на статоре, понижая
. Рис 1.а схема 3-х фазной ТРН
его о напряжения сети до нуля. Стоит отметить, что форма напряжения статора не является синусоидальной, а значит, его можно представить в виде совокупности нескольких гармоник, причем каждая изменяется с определенной частотой[3].
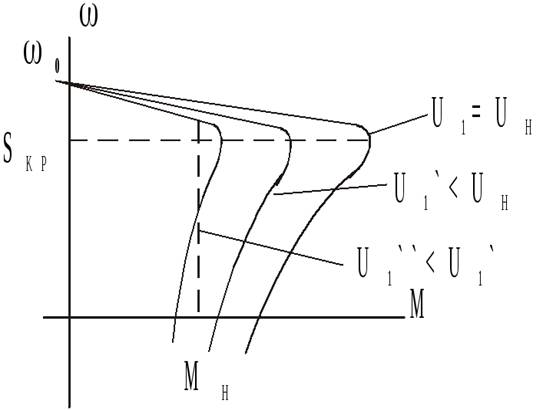
Рис 1.б. Механические характеристики АД
На рисунке б изображены механические характеристики асинхронного двигателя, при регулировании на статоре напряжения. Оно не влияет на скорость холостого хода (ω0) и на критическое скольжение (Sк), но при это значительно приводит к изменению значения критического момента (Mк), а все потому, что критический асинхронно машины пропорционален квадрату напряжения: Mк~U^2. Следовательно, с уменьшением напряжения, резко уменьшается критический момент, что ведет к снижению перегрузочной способности асинхронного двигателя. Принимая во внимание форму характеристик, напрашивается вывод, что при большом критическом скольжении, использовать изменение напряжения статора, для регулировки скорости можно, но только в небольших пределах.
Из-за описанных выше недостатков, помимо тиристорного регулятора напряжения в сфере асинхронного электропривода, применяется также регулятор напряжения ШИМ. Он представляет из себя устройство работающее на полевых транзисторах, способные коммутировать большие токи(до 150 А), при малом напряжении(от 12-15 В) на затворе.
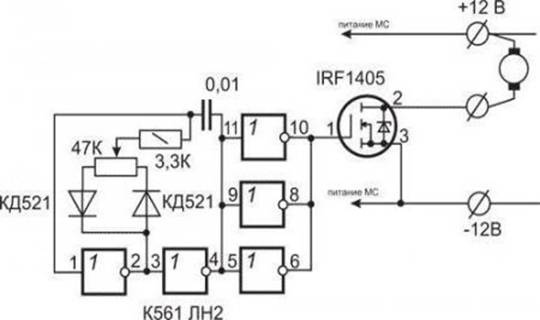
Рис 1.в. Схема ШИМ-регулятора
Схема на рисунке в – схема ШИМ-регулятора собранная на инверторах КМОП-микросхемы. Генерируя прямоугольные импульсы, она тем самым воздействует на два логических элемента. Постоянная времени разряда и заряда частотозадающего конденсатора, отдельно изменяется благодаря диодам, что позволяет изменять скваженность, и как результат – значение эффективного напряжения. Однако, в данной схеме возможно применение разных инвертирующих КМОП-элементов, а также элементов ИЛИ-НЕ и И. Словом можно использовать любые виды устройств, но придется как правильно группирировать их входы, чтобы они смогли выполнить возложенный на них функционал. Преимущества данной схемы, это доступность элементов и их простота,а недостатки- несовершенство относительно изменения диапазона выходного напряжения, и кроме того сложность доработки[2].
Тиристорные регуляторы напряжения используются в сфере асинхронного электропривода, из-за своего быстродействия и простоты в обсуживании, пример тому их реальная область применения в электроприводах насосных и вентиляторых установок. Это обьясняется тем, что при понижении скорости электропривода, происходит и резкое уменьшение момента сопротивления этих механизмов, следовательно становится возможным регулирование скорости асинхронного двигателя в области допустимых потерь. Однако сам способ регулирования угловой скорости, путем изменения напряжения при неизменной частоте сети является не экономичным, так как потери в роторной цепи при постоянном моменте нагрузки увеличиваются пропорционально скольжению. Что же касается регулятора напряжения ШИМ, то он характеризуется высокимкоэффициэнтом полезного действия, высокой надежностью и компактность[4].
ANNOTATION:
The design of devices for smooth start-up of asynchronous machines is considered, which allows to minimize the existing inconveniences of AD regulation and satisfy the requirements for electromagnetic compatibility.
Библиографический список:
1.Розанов Ю.К. Полупроводниковые преобразователи со звеном повышенной частоты. М.: Энергоатомиздат, 1987. 184 с.
2.Ьраславский И.Я. Баланс реактивной мощности в системе тиристорррный регулятор напряжения – асинхронный двигатель.//Электротехника.-2000.-№1
3. Кобзев А.В. и др. Стабилизаторы переменного напряжения с высокочастотным широтно-импульсным регулированием. М.: Энергоатомиздат, 1986. 120 с.
4. Зиновьев Г.С. Основы силовой электроники. Новосибирск: Издательство НГТУ.2003.664с