Электропривод с программным управлением.
Понятие о системах с программным управлением
Понятие о системах управления электроприводов
В теории автоматического управления (ТАУ) используется термин «система автоматического управления» (САУ), который объединяет две составные части системы: «управляющее устройство» и «объект управления».
В прикладных работах по автоматическому управлению вместо термина САУ используется понятие
«Динамическая система » ‑ физическая система, объединяющая две части:
1. систему управления — совокупность различных технических средств управления;
2. объект управления — некоторую техническую систему (рис. 1).
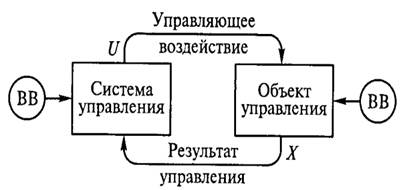
Рисунок 1. Общий вид контура управления
Обе части динамической системы могут иметь внешние воздействия (ВВ) — входные задающие и возмущающие воздействия.
Под термином «Система управления электропривода » подразумевается комплекс технических средств, формирующих и осуществляющих воздействия на двигатель с целью управления движением рабочего органа (РО) производственной установки в соответствии с технологическими требованиями.
В понятии СУЭП конкретизируется объект управления, которым является двигатель (Д) совместно с механической передачей (МП) и рабочим органом.
В составе СУЭП выделяется:
• слаботочная часть, формирующая алгоритм управления, и
• силовую часть, осуществляющую силовое управляющее воздействие на двигатель.
Современные системы автоматизированного электропривода представляют собой сложные устройства, состоящие из электрических машин, различных электрических аппаратов и узлов автоматики.
Задачи СУ ЭП:
• стабилизация координаты объекта управления;
• программное управление по заранее известному закону;
• слежение за измеряемой величиной, закон изменения которой заранее неизвестен;
• самонастройка (адаптация).
Классификация систем программного управления.
СУ ЭП можно классифицировать по ряду основных признаков:
1. По степени автоматизации функций управления:
- системы ручного управления (человек-оператор вырабатывает и реализует стратегию управления); как правило, это СУ ЭП без регуляторов координат ОУ, например релейно-контакторные системы управления (РКСУ) электроприводами мостового крана на основе типовых релейно-контакторных панелей управления; управление ЭП осуществляется параметрически в функции времени, тока якоря (статора) двигателя, Э.Д.С. (напряжения) двигателя и т.п.;
- системы автоматизированного управления (человеко-машинные СУ ЭП); человек-оператор задает и корректирует задание (уставки параметров) процесса управления ЭП, а СУ ЭП (аналоговые или цифровые на основе микропроцессорных контроллеров) осуществляют оптимальную в некотором смысле отработку задающих воздействий;
- системы автоматического управления СУ ЭП (без участия человека); в этом случае аналоговые или микропроцессорные средства управления берут на себя функции и выработки оптимальных заданий (уставок) управления, и управления технологическим процессом; оператор в таких СУ ЭП или АСУ ТП выполняет функции системного менеджера и вмешивается в ход технологического процесса лишь при нештатных ситуациях.
2. По характеру протекания процессов в СУ ЭП и, соответственно, форме математического описания:
- непрерывные (аналоговые) СУ ЭП;
- дискретные (релейные, импульсные, цифровые) СУ ЭП;
- дискретно-непрерывные, в том числе цифро-аналоговые СУ ЭП.
3. По наличию существенных нелинейностей в СУ ЭП:
- линейные (линеаризованные) СУ ЭП;
- нелинейные СУ ЭП.
4. По типу обратных связей:
- разомкнутые (без обратных связей) СУ ЭП;
- замкнутые СУ ЭП:
• по ошибке регулирования (с регулированием по отклонению выходной координаты от заданного значения);
• по вектору состояния ОУ (полному или редуцированному);
• по вектору возмущающих воздействий ОУ (с регулированием по возмущению);
• замкнутые по векторам состояния и возмущающих воздействий (с комбинированным управлением).
5. По принципу управления (характеру задач управления):
- системы стабилизации какой-либо координаты ОУ;
- системы программного управления;
- следящие системы и системы воспроизведения движений.
6. По числу и связности каналов управления:
- одномерные СУ ЭП (со скалярным управлением);
- многомерные СУ ЭП с автономными (невзаимосвязанными) каналами управления (с субвекторным управлением);
- многомерные многосвязные СУ ЭП (с векторным управлением).
Этот классификационный признак СУ ЭП определяется характером взаимодействия электродвигателей и механической системы ОУ.