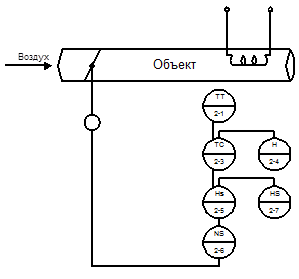
Рис 2. Контур трехпозиционного регулирования.
Объект регулирования по своим особенностям статический с самовыравниванием с передаточным запаздыванием, что способствовало в выборе пропорционально-интегрального регулятора.
В схему входит измерение температуры теплоносителя и сравнивая с заданием, регулятор через HS – блок ручного управления, включает контактными «больше» или «меньше» бесконтактный пускатель NS, который в свою очередь управляет исполнительным механизмом, т.е. подачу на теплоноситель воздуха.
При двухпозиционном регулировании релейным элементом регулируется включение теплоносителя.
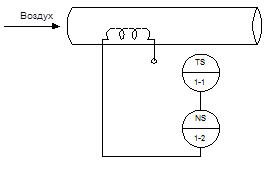
Рис 3. Контур двухпозиционного регулирования.
При достижении определенной температуры, пускатель выключает подачу напряжения на электронагревательный элемент. Измерение и регулирование температуры осуществляется динамометрическим датчиком – реле температуры.
2. Расчетная часть.
2.1. Параметрический синтез и анализ одноконтурной САР.
Анализ САУ с элементами электроавтоматики осуществляется с помощью алгебраических критериев Гаусса и Гурвица, критерия Ляпунова, частотных критериев Михайлова, Найквиста – Михайлова и др.
При анализе САУ изучают вопросы устойчивости и другие качественные показатели разомкнутых и замкнутых САУ находятся запасы устойчивости по модулю и фазе, определяются астатизм замкнутых систем, коэффициенты ошибок для следящих систем и т.д.
К основным качественным показателям систем, которые определяются после нахождения так называемых h-функций, относятся следующие:
1.Время переходного процесса tр, по истечении которого, управляемая величина будет оставаться близкой к установившемуся значению;
2.Установившееся значение регулируемой величины h¥=lim h(t)=hy;
3.Максимальное перерегулирование y=(hmax-hy)/hy (здесь hmax-значение первого максимума);
4.Частота колебаний w=2p/Т (здесь Т-период колебаний);
5.Число колебаний переходного процесса n;
6.Время достижения первого максимума tmax;
7.Декремент затухания s=(hmax-hy)/ (hmax-hy);
Важным показателем качества САУ является их надежность. Качественные показатели определяются путем решения дифференциальных уравнений, которыми описываются уже известные структуры САУ.
Синтез САУ заключается в нахождении структур и параметров ее, которые бы отвечали заданным показателям качества. Синтез является более трудной задачей по сравнению с анализом. Основными методами используемыми при синтезе САУ является аналитический, графоаналитический и машинный (с помощью вычислительных машин).
2.1.1. Оценка возможности статического регулирования.
При выборе регулятора необходимо знать численные динамические сведения об объекте регулирования, т.е. К0; Тоб;t0, которые определим по разгонной характеристике.
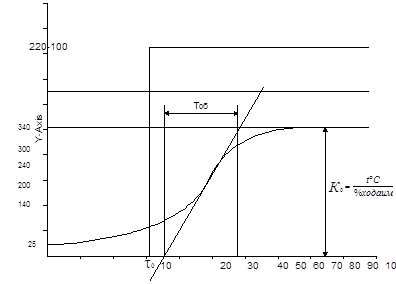
Рис 4. Кривая разгона САР температуры лабораторного стенда.
Тип регулятора ориентировочно выбирают по отношению t/Tоб;
| Наименование регулятора по роду действия | Критерий |
| Импульсный | t/Tоб>0,5-1,0 |
| Релейный | 0<t/Tоб<0,2 |
| Непрерывный | t/Tоб>0 |
Критерии выбора регуляторов по роду действия.
Для исследования и расчета структурную схему АСР путем эквивалентных преобразований следует привести к простейшему стандартному виду объект-регулятор. Это необходимо, во-первых, для того чтобы определить ее передаточные функции, а следовательно, и математические зависимости, которыми определяются переходные процессы в системе, и во-вторых, как правило, все инженерные методы расчета и определения параметров настройки регуляторов применено для такой стандартной структуры.
Так исходная структурная схема САР температуры по типовой функциональной схеме (см. чертежи) может быть представлена в виде изображенном на рисунке.
Где WP(р), WИМ(р), WPO(р), WOP(р), WИУ(р), - соответственно передаточные функции регулятора, исполнительного механизма, регулирующего органа, объекта регулирования и измерительного устройство.
На структурной схеме все воздействия (сигнала) следует указывать в преобразованном по Лапласу виде.

Рис 5. Преобразованная структурная схема САР (t).
Все звенья, определяющие динамические свойства узлов сопряжения (соединения, взаимосвязи) объекта с регулятором (например регулирующие органы, линии связи, измерительные устройства, датчики т.п.), целесообразно, как правило, относить к объекту регулирования.
Если в системе непосредственно регулятор и исполнительный механизм реализуют закон регулирования, то передаточная функция регулятора
WP(р)=Wу(р) WИМ(р)
Статическое регулирование характеризуется наличием П – регулятора, тогда
WP(р)=Крег
При оптимизации значений, по экспериментальным данным целесообразно К – коэффициент регулятора принимать К=10
WP(р)=10
Передаточная функция объекта регулирования с учетом отнесенных к собственно объекту звеньев, имеет вид:
Wоб(р)= WPO(р)WOP(р)WИУ(р)
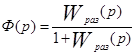
В общем случае любая одномерная АСР с главной обратной связью путем постепенного укрепления звеньев может быть приведена к простейшему виду, передаточная функция разомкнутой системы, которой
 W(p)=WP(p)*WОБ(p)
W(p)=WP(p)*WОБ(p)
Кривая разгона САР температуры показывает, что объект инерционный, статический и имеет запаздывание, так как запаздывание незначительно. В дальнейшем исследовании им можно пренебречь. Тогда передаточная функция объекта будет иметь следующий вид:
Wоб(р)=Коб/(Тобр+1)
Передаточная функция разомкнутой системы
W(p)=WP(p)*WОБ(p)
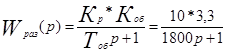 - при статическом регулировании.
- при статическом регулировании.
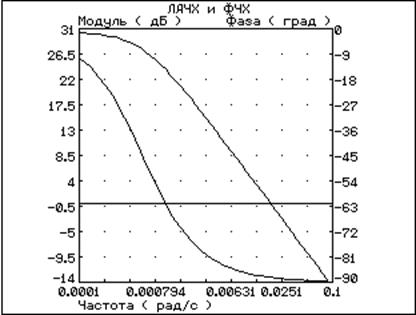
Рис 6. ЛАЧХ и ЛФЧХ для объекта.

Рис 7. АФХ для объекта.
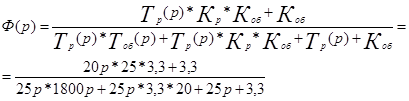
Найдем передаточную функцию замкнутой системы:

Т.к. величина постоянных времени определяется конструктивными особенностями элементов системы, то настройка системы регулирования осуществляется только изменением ее коэффициента К путем воздействия на коэффициент передачи Кр регулятора.
Для определения устойчивости системы строим амплитудно-частотную, фазо-частотную характеристики в логарифмическом масштабе и по замкнутой системе строим годограф.
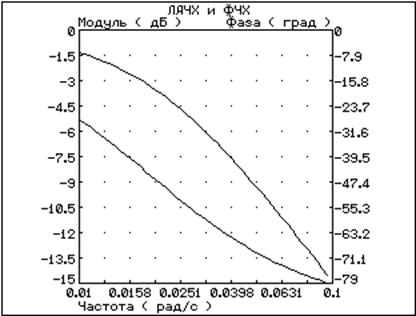
Рис 8. ЛАХЧ и ЛФЧХ при статическом регулировании.

Рис 9. Амплитудно-фазовая характеристика замкнутой системы.
По графикам видим, что при коэффициенте регулятора Кр=10 запас устойчивости выполняется, т.к. на частоте среза wср фаза меньше 180°, что характеризует устойчивость системы при статическом регулировании, значит возможно использование П-регулятора для САР температуры.
2.1.2. Оценка возможности астатического регулирования.
Одним из признаков астатического звена (или системы в целом) является наличие комплексного переменного Р в качестве множителя в знаменателе передаточной функции, т.е. наличие интегрирующей составляющей.
Рассмотрим возможность ПИ-закона регулирования САР температуры. Для этого построим структурную схему, в которую включим ПИ-регулятор.
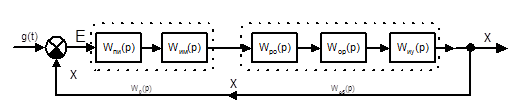
Рис 10. Структурная схема САР температуры.
Передаточная функция ПИ-регулятора имеет вид
WP(р)=К+1/Тр; (К=20; Ти=25 сек.)
Найдем передаточную функцию разомкнутой системы
Wраз(р)=Wр(р)Wоб(р)

Найдем передаточную функцию замкнутой системы

По передаточной функции разомкнутой системы строим ЛАЧХ и ЛФЧХ, а по функции замкнутой системы строим АФХ.
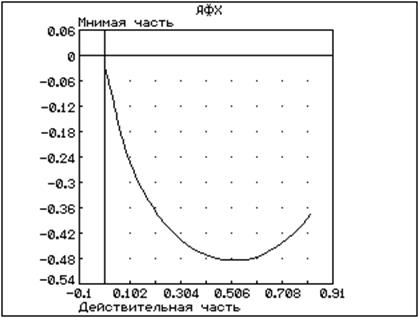
Рис 11. Амплитудно-фазовая характеристика замкнутой системы.

Рис 12. ЛАЧХ и ЛФЧХ при астатическом регулировании.
Частотные характеристики показывают, что система имеет запас устойчивости, как по амплитуде, так и по фазе, т.к. на частоте среза wср фаза < 180° значит возможно использовать ПИ регулятор для САР температуры.
2.1.3. Исследование качества одноконтурной САР.
К автоматическим системам регулирования предъявляются требования не только в отношении ее устойчивости. Для работоспособности системы не менее необходимо, что бы процесс автоматического регулирования при определенных качественных показателей.
Требования к качеству процесса регулирования в каждом случае могут быть самыми разнообразными, однако из всех качественных показателей можно выделить несколько наиболее существенных, которые с достаточной полнотой определяют качество почти всех АСР.
Качество процесса регулирования системы, как правило, оценивают по ее переходной функции.
Основными показателями качества является: - время регулирования tр – называется время, в течении которого, начиная с момента приложения воздействия на систему отклонения регулируемой величины Dh(t) от ее установившегося значения h0=h(¥) будут меньше на пред заданной величины Е. Обычно принимают, что по истечении времени регулирования отклонении регулируемой величины от установившегося значения должно быть не более Е=5%. Таким образом, время регулирования определяет длительность (быстродействие) переходного процесса.
- перерегулированием s называется максимальное отклонение Dhmax регулируемой величины от установившегося значения, выраженное в процентах от h0=h(¥).
Абсолютная величина Dhmax определяется из кривой переходного процесса:
Dhmax=hmax- h(¥)
Соответственно перерегулирование будет равно:

- Колебательность системы характеризуется числом колебаний регулируемой величины за время регулирования tр. Если за это время переходный процесс в системе совершает число колебаний меньше заданного, то считается, что система имеет требуемые качеством регулирования в части ее колебательности;
- Установившаяся ошибка Е. Установившееся значение регулируемой величины h0 в окончании переходного процесса зависит от астатизма n системы. В статических системах (n=0) – установившаяся ошибка при постоянной величине входного воздействия не равна 0 и следовательно, установившееся значение регулируемой величины h0 будет отличаться от ее заданного значения на величину установившейся ошибки.
По каналу возмущающего воздействия величина ошибки определяется выражением
где x0-постоянное задающее воздействие; К – коэффициент передачи системы.
По каналу возмущающего воздействия величина ошибки согласно выражения

где f0 – постоянное возмущающее воздействие; Коб – коэффициент передачи объекта регулирования; Кр – коэффициент передачи регулятора.
Сравнивая переходные функции статического и астатического регулирования, выбираем оптимальный регулятор для САР температуры.
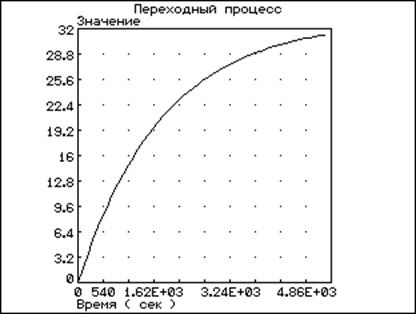
Рис 13. Переходная функция САР с П-регулятором

Рис 14. Переходная функция САР с ПИ-регулятором
По графикам видно, что время регулирования с ПИ-регулятором меньше, чем с П-регулятором; значит для САР температуры целесообразно применить импульсный регулятор выполняющий ПИ-закон регулирования.
Для расчетов использовали на компьютере программу «Classic».
3. Разработка схемы контура регулирования заданным параметром.
Схемы выполнены по ГОСТ 2.710-81.

Рис 15. Контур трехпозиционного регулирования.
Подача питания на лабораторный стенд производится автоматом питания SF1 схема №003Э3. При этом включается нагревательный элемент объекта управления через размыкающий контакт КМ 1.1. реле КМ 1, и вторичный показывающий самопишущий прибор КСУ 4. В положении 90° универсального переключателя SA1 электродвигатель вентилятора. В положении -45°, переключателя SA1, включается в позиционное регулирование, в положении +45° - трехпозиционное регулирование.
При 2-х позиционном регулировании через размыкающий контакт датчика ТУДЭ1 включена обмотка реле КМ1. При превышении установленной температуры на датчике, его контакт размыкается и размыкает контакт КМ1.1, выключая при этом нагревательный элемент, о чем оповещает сигнальная лампа HL4.
Трехпозиционное регулирование показано на схеме №004Э2. В автоматическом режиме электрический сигнал от термопреобразователе ТСМУ последовательно поступает сначала на вход прибора КСУ4(2) зажим 12 и через зажим 11 поступает на вход 25 регулирующего блока РБИ 1-П.
На вход РБИ 1-П зажим 21 от задатчика РЗД подается также токовый сигнал, пропорциональный заданному значению температуры.
На выходе регулятора, зажимами 7 и 9 выдается сигнал «Меньше» и «Больше» соответственно, относительно средней точки зажима 10. Сигнал проходит через БРУ и размыкающие контакты SQ1 и SQ2 исполнительного механизма ИМ, которые управляют пускателем ПБР зажимы 7 и 9. ПБР включает ИМ контактами 1, 2 и 3.
В ручном режиме управления ИМ проходит кнопками БРУ «Больше» или «Меньше».
Заключение
Для рассчитываемой системы объекта произведены следующие расчеты:
Разработка функциональной схемы автоматического регулирования. Получена передаточная функция и структурное преобразование схемы объекта управления. Построены частотные характеристики объекта управления. Произведена оценка возможностей статического объекта регулирования (П-регулятор), а также оценка возможности астатического объекта регулирования (ПИ-регулятор). Произведено исследование качества одноконтурной системы автоматического регулирования.
Выполнено построение желаемых частотных характеристик скорректированной системы. Выполнен выбор и расчёт корректирующего устройства. Произведена оценка качества скорректированной системы.
Выполнена разработка схемы контура регулирования заданным параметром.
На основании проведенных расчетов можно сказать, что подбор корректирующего устройства произведен, верно, и отвечает показателям качества системы с произведенной коррекцией.
Список используемой литературы.
1. И.Ю. Топчев «Атлас для проектирования CAP»
2. B.C. Чистяков «Краткий справочник по теплотехническим измерениям»
3. Н.Н.Иващенко «Автоматическое регулирование»
4. В.В. Черенков «Промышленные приборы и средства автоматизации»