Технические средства реализации системы правления включают датчики ругулированых параметров, исполнительные механизмы и регулирующие органы, преобразователи,рабочая станция
Общая структурная схема рабочей станции изображена на рисунке
Рабочая станция имеет вид:

Рисунок 7 – Схема рабочей станции
Таблица 3
Спецификация технических средств:
| № | Тип | К-во | Предназначение |
| 1б,2б | ADAM 4012 | Модуль аналогового ввода с датчиков давления, спиртометра, тип входного сигнала: mV, V или mA, диапазон: ±150мВ, ±20мА, ±5В, ±10В | |
| ADAM 4561 | Преобразователь интерфейса USB в RS-232/422/485 | ||
| 1а | Сапфир-22М-ДА2050 | Датчик давления в магистрали, верхние пределы измерений: 1.6 МПа, Предел допускаемой основной погрешности, 0,5 0,25; 0,5%, вых. 0-5; 4-20; 5-0; 20-4мА, | |
| 2а | Alcolyzer Plus Spirits | Спиртомер для крепких спиртных напитков; Диапазон измерения: Спирт: от 35 до 65 об. % (значения отображаются от 0 до 90 об. % спирта, однако, при содержании спирта менее 35 об. % и более 65 об. % точность измерения уменьшается); Значение рН (опционально): от 0 до 14; Цвет (опционально): от 0 до 120 EBC; Плотность (опционально): от 0 до 3 г/см3; | |
| 2д,3д | ADAM 4069 | Модуль c релейными выходами, 8 реле с нормально разомкнутым контактом, нагрузочная способность контактов: 250 В/ 5 A для перем. тока, 30 В/ 5 A для пост. тока, время включения 5 мс, время выключения 5,6 мс | |
| 2г,2в, 3в,3г | МЭО 40/25-0,25 | Механизм исполнительный одно-оборотный, номинальный крутя-щий момент 40кгс/м, номинальный ход выходного органа 0,25 оборота за 25с, Напряжение питания 220В. Частота 50Гц | |
| 2г,2в | КРП-100 | Клапан регулирующий, Ду=50мм | |
| 3г,3в | КРП-100 | Клапан регулирующий, Ду=200мм |
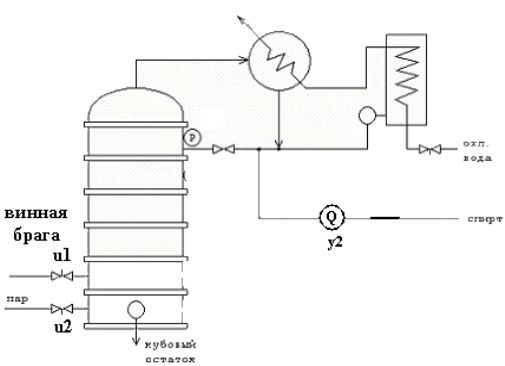
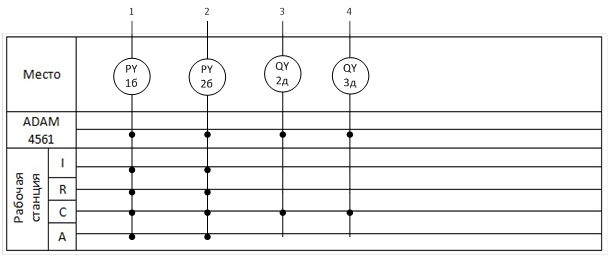 Рисунок 8. Функциональная схема автоматизации.
Рисунок 8. Функциональная схема автоматизации.
Вывод
В курсовом проекте было выполнено математическое обеспечение АСУТП колонны перегонки коньячного спирта. Были построены характеристики объекта: кривые разгона и при 10-и процентном возмущении. Результаты показали, что качество отвечает требуемому. В результате выбора технического обеспечения: разработана функциональная схема автоматизации, подобрано оборудование для технической реализации данной системы. Разработано программное обеспечение: программа, которая моделирует поведение системы. При тестировании данной программы было показано регулятор работает адекватно.
Литература
1.Стопакевич А.А.Теория систем и системный анализ.Учебник для вузов.-Киев: ВИПОЛ,1996.-200с.
2.Демченко В.А.Автоматизация и моделирование технологичных процессов АЭС и ТЭС.-Одесса:Астроприт,2001.-308с.
3.Стопакевич А.А.Матлаб. Методические указания к лабораторным работам,курсового и дипломного проектирования.-Одесса,2000.-18с.
Приложение 1
Текст программы
A=[-1/35 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 -1/129 0 0 0 0 0 0 0 0 0 0 0 0;
0 4/48 -2/48 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 -1/38 0 0 0 0 0 0 0 0 0 0;
0 0 0 4/9 -2/9 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 -1/110 0 0 0 0 0 0 0 0;
0 0 0 0 0 4/134 -2/134 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 -1/13.5 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 -1/98 0 0 0 0 0;
0 0 0 0 0 0 0 0 4/133 -2/133 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 -1/50 0 0 0;
0 0 0 0 0 0 0 0 0 0 4/12 -2/12 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 -1/186 0;
0 0 0 0 0 0 0 0 0 0 0 0 4/150 -2/150];
B=[-42.5/35 0;
-72.5/129 0;
0 0;
1720/38 0;
0 0;
730/110 0;
0 0;
0 0.994/13.5;
0 0.459/98;
0 0;
0 -6.9/50;
0 0;
0 -5.1/186;
0 0];
C=[1 -1 1 0 0 0 0 1 -1 1 0 0 0 0;
0 0 0 -1 1 -1 1 0 0 0 -1 1 -1 1];
D=[0 0;0 0];
dt=0.1/max(abs(eig(A)));
t=0:dt:999;
G=length(t);
[Ad Bd]=c2d(A,B,dt);
y=dstep(Ad,Bd,C,D,1,G);
figure(1)
subplot(2,2,1);plot(y(:,1));grid;ylabel('u1,МПа');title('Razgon u1,1%');
subplot(2,2,3);plot(y(:,2));grid;ylabel('u2,');
%u2
y=dstep(Ad,Bd,C,D,2,G);
subplot(2,2,2);plot(y(:,1));grid;ylabel('y1,М3/с');title('Razgon u2,1%');
subplot(2,2,4);plot(y(:,2));grid;ylabel('y2,кг/с');
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
A1=[Ad zeros(14,2);C eye(2)];
B1=[Bd; zeros(2)];
C1=[zeros(2,14) eye(2)];
Q2=1e6*[1 0;0 1];
V=C'*Q2*C;
Q=[V zeros(14,2);zeros(2,14) eye(2)];
R=eye(2);
Q1=eye(16);
R1=eye(2);
K=dlqr(A1,B1,Q,R);
L=dlqr(A1',C1',Q1,R1)';
K1=K(:,1:14);
K2=K(:,15:16);
L1=L(1:14,:);
L2=L(15:16,:);
Ar=[Ad-Bd*K1 -Bd*K2-L1 L1; C eye(2)-L2 L2; zeros(2,14) zeros(2) eye(2)];
Br=[zeros(14,2); zeros(2); eye(2)];
Cr=[-K zeros(2)];
Az=[Ad Bd*Cr; Br*C Ar];
Bf=[Bd; zeros(18,2)];
Bz=[zeros(14,2); Br];
Cz=[C zeros(2,18)];
x=zeros(14,1);xr=zeros(18,1); u=zeros(2,1);
yy=[]; uu=[];f=[.0010;.0010];z=[0;0];
for i=1:2000,
y=C*x; e=-z+y;
u=Cr*xr; xr=Ar*xr+Br*e;
y=C*x; x=Ad*x+Bd*(u+f);
yy=[yy; y']; uu=[uu; u'];
end
x1=x; xr1=xr; u1=u;
figure(2)
subplot(2,2,1); plot(yy(:,1));grid;ylabel('y1,MPa');title('Perehod proces Braga ');
subplot(2,2,3); plot(yy(:,2));grid;ylabel('y2,');
subplot(2,2,2); plot(uu(:,1));grid;ylabel('u1,M3/c');title('Perehod proces Par ');
subplot(2,2,4); plot(uu(:,2));grid;ylabel('u2,kg/c');