Лекция № 8
Асинхронные машины
Вращающееся магнитное поле 3ф системы токов
 |
а)
 |
б)
На рис. а) изображен стальной цилиндр, набранный из листовой электротехнической стали с внутренними пазами под углом 120° друг к другу.
В пазах расположены три обмотки, начала которых подсоединены к сети 3ф переменного тока, а концы объединены в общую точку. Положительное направление токов от начала к концам обмоток. Синусоидальные токи IA;IB;IC создают намагничивающие силы FA; FB; FC , вектора которых совпадают с осью соответствующих обмоток. Направление и величину этих пульсирующих н.с. легко определить с помощью временной диаграммы фазных токов на рис б).
На рис а) результирующая н.с.  и ее составляющие
и ее составляющие  ;
;  ;
;  показаны для момента времени t1 (рис б). Из рис б) легко видно, что:
показаны для момента времени t1 (рис б). Из рис б) легко видно, что:
=ImW; = = - 1/2 ImW; = + + =3/2 ImW
По аналогии для моментов времени t2;t3 и т.д. Значение результирующий н.с. =3/2 ImW.Однако для t2 и t3 будет совпадать с осью обмоток фаз В и С, а, следовательно, будет поворачиваться по часовой стрелке, т.е. поле будет вращаться.
На рис а) для времени t2 и t3 вектор показан пунктиром. Это поле является двухполюсным, т.к. из одной части (полюса) N магнитные силовые линии выходят, а в другую часть (полюс) S – входят. Полюса перемещаются в пространстве непрерывно. За 1 период поле делает 1 оборот. Скорость вращения его n0=60f1=60*50=3000 об/мин. Направление вращения поля совпадает с порядком чередования фаз А→В→С. Изменив порядок чередования фаз (поменять зажимы двух фаз) изменим направление вращения поля.
Общая формула скорости вращения магнитного поля n0=  , где f – частота сети, r – число пар полюсов обмоток; 2r – число полюсов.
, где f – частота сети, r – число пар полюсов обмоток; 2r – число полюсов.
Изменяя f изменяем плавно n0; увеличивая r(от 1, 2,3…n) уменьшаем дискретно n0. Увеличение r достигается увеличением числа обмоток.
Устройство асинхронного двигателя(АД)
Рассмотренное выше возбуждение вращающегося магнитного поля используется в АД.
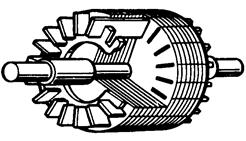
АД состоит из: статора (неподвижная часть), ротора (вращающаяся часть), корпуса. Корпус выполняется из стали, чугуна или алюминия. По нему магнитный поток не замыкается. Статор представляет собой цилиндр из штампованных листов электротехнической стали. В пазах цилиндра расположены обмотки, питаемая от сети переменного 3ф тока. Внутри статора расположен ротор, набранный из листов электротехнической стали. На поверхности ротора пазы, в которых расположена обмотка. АД бывают с фазным (вкладывается обмотка в пазы) ротором и с К.З. ротором (в пазы заливается цветной металл, застывшие стержни по торцам ротора замыкаются кольцами (по типу беличьей клетки). Фазный ротор имеет 3ф обмотку, три конца которой присоединены к контактным кольцам расположенным на валу ротора. Через кольца в цепь ротора вводятся добавочные активные сопротивления.
Принцип действия АД: под действием приложенного к обмоткам статора Uсети по ним протекают фазные токи, создающие магнитный поток (вращающееся магнитное поле). Этот поток, пересекая обмотку ротора, наводит в ней эдс ротора, под действием которой по обмотке ротора протекают токи, создающие магнитное поле ротора. Взаимодействие полей статора и ротора обеспечивает вращение ротора АД. (Подробно устройство АД проработать самостоятельно). Т.е. происходит преобразование электроэнергии, потребляемой из сети в механическую на валу АД.
Режимы ХХ и ИХХ АД.
Приведение рабочего режима АД с вращающимся ротором к неизв.
Рассмотрим АД с фазным ротором, обмотка которого разомкнута, а статорная обмотка подключена к сети переменного 3ф тока. Магнитное поле статора со скоростью n0 пересекает витки ротора и наводит в них эдс. При этом Iр= 0;Мвр=0;n=0 (число оборотов ротора). Частота эдс в неподвижной разомкнутой обмотке ротора определяется fн=  =
=  =f1, т.е. равна частоте сети. Как у тр-ра, и нет преобразования эл. энергии в неэлектрическую. В этом отличие от АД с вращающимся ротором, где есть преобразование.
=f1, т.е. равна частоте сети. Как у тр-ра, и нет преобразования эл. энергии в неэлектрическую. В этом отличие от АД с вращающимся ротором, где есть преобразование.
Если замкнуть обмотку ротора накоротко (или через добавочное активное сопротивление), то ротор АД будет вращаться со скоростью n<n0 (из-за механических потерь (подшипники, вентилятор)). Это будет режим ХХ (отсутствие нагрузки на валу). Неравенство скоростей вращения ротора и поля статора, т.е. асинхронность, и лежит в основе названия АД.
Если добавочными силами (добавочный двигатель, присоединенный к валу АД, или масса электропоезда, движущегося под уклон) достичь скорости вращения ротора АД равной n0, т.е. n=n0, то получим режим ИХХ. При этом поле статора не пересекает витков ротора (синхронное вращение) и Iр=0 Eр=0. Если же подобным образом увеличим n>n0, то АД будет отдавать эл. энергию в сеть, т.е. работать в режиме генераторного торможения (преобразует механическую энергию в электрическую и отдает в сеть, что экономически выгодно и часто используется). Отметим, что при ХХ I10≈(0,2-0,4)I1H, а у тр-в в (10-20) раз меньше. (Это объясняется большим воздушным зазором между статором и ротором). У тр-в такого зазора практически нет.
Лекция № 9
Зависимость частоты, ЭДС и токов ротора от скольжения работающего АД
Величина  S=
S=  называется скольжением АД и зависит от нагрузки на валу АД, т.е. от момента сопротивления.
называется скольжением АД и зависит от нагрузки на валу АД, т.е. от момента сопротивления.
n0 – обороты поля статора (обороты ИХХ)
n – число оборотов ротора АД. S<1
При ХХ S мало ≈ сотые доли %
При номинальной нагрузке S≈(2-8)%.
f2=  , где f2-частота тока вращающегося ротора, f2 при номинальной нагрузке ≈1-4 Гц; f1=50Гц.
, где f2-частота тока вращающегося ротора, f2 при номинальной нагрузке ≈1-4 Гц; f1=50Гц.
E2S=E2S, где E2S-ЭДС вращ-гося ротора,
E2-ЭДС неподвижного ротора.
X2σ=X2S, где X2σ – индуктивное сопротивление рассеяния обмотки вращающегося ротора;
X2  - индуктивное сопротивление неподвижного ротора.
- индуктивное сопротивление неподвижного ротора.
I2=  , где I2 – ток вращающегося ротора
, где I2 – ток вращающегося ротора
r2 - активное сопротивление ротора
 X2 - индуктивное сопротивление неподвижного ротора.
X2 - индуктивное сопротивление неподвижного ротора.
При пуске: n=0; s=1
При ХХ: n=nxx; s=sxx; M=Mxx; I2=Ixx
При ИХХ: n=n0; s=0; M=0; I2=0
Уравнения НС и токов АД
По аналогии с тр-ром результирующая НС АД определится:  . Т.к. Ф=const и ≡ U1≈E1=const, то отсюда вытекает уравнение НС и токов
. Т.к. Ф=const и ≡ U1≈E1=const, то отсюда вытекает уравнение НС и токов  (разделив на W1 получим)
(разделив на W1 получим)
 , где
, где  .
.
Отличим АД с вращающимся ротором от АД заторможенным (как тр-р), то, что в первом есть преобразование электрической энергии в механическую, а в заторможенном нет.
Энергетическая диаграмма, КПД и коэффициент мощности АД
Баланс активных мощностей АД можно представить в виде энергетической диаграммы, а также записать в виде ур-ния

РЭ=∆Р1Э+∆Рм+∆Р2Э+∆РМЕX+Р,
где РЭ=3U1I1cosφ1 – мощность, потребляемая АД из сети
∆Р1Э – эл. потери в обмотках статора
∆РМ – магнитные потери в статоре
РМЕX – полная механическая мощность, развиваемая АД
∆ РМЕX – потери механической мощности (в подшипниках, вентиляторах)
Р – полезная механическая мощность на валу.
АД (дается в паспорте АД и каталогах при номинальном режиме)
РЭМ – эл.магн. мощность, передаваемая от статора к ротору
РЭМ= РЭ -∆Р1Э - ∆РМ.
Исходя из энергетической диаграммы и полной схемы замещения АД суммарные потери можно записать в виде
Σ∆Р=∆РС+∆Рvar, где var – переменный
∆РС – постоянные потери (потери холостого хода и ∆ РМЕX), не зависящий от нагрузки
∆ РV – переменные потери, зависящие от перегрузки.
Потери ∆ Р и потребляемая реактивная мощность Q определяют важнейшие энергетические показатели АД – КПД и cosφ (коэффициент мощности).
По аналогии с тр-ром КПД определится из ф-лы η=  ,
,
где β=  - коэффициент загрузки.
- коэффициент загрузки.


Рис. Рабочие характеристики.
И так с увеличением загрузки (РЭ) увеличивается и cosφ. Зависимость η,I,k,cosφ от загрузки β показан на графике. Из него видно, что у АД большой IXX; η с увеличением с увеличением загрузки сначала растет, а затем падает, а cosφ и I увеличивается.
Судя по графику η АД в холостую не использовать.
Схема замещения и векторная диаграмма 2й цепи АД с неподвижным и вращающимся ротором.

Векторная диаграмма 2й цепи АД с вращающимся (сплошные линии) и неподвижным ротором (пунктирные линии).
Чтобы угол ψ2 (I2ˆE2)=const и I2=const надо чтобы при неподвижном роторе E2=E2S∙1/S(т.е. в r2 в 1/S больше т.е. r2/S и  )
)
Лекция № 10
Вращающий момент АД
Известны выражения механической мощности АД:
РМЕХ=3I2/ 2 r2/  (из схемы замещения, составленной по аналогии с приведенным трансформатором)
(из схемы замещения, составленной по аналогии с приведенным трансформатором)
РМЕХ=МΩ=МΩ0(1-S), где
М – вращающий момент [нм]
P – мощность [Bт]
Ω - угловая частота вращения ротора
Ω0 – угловая частота вращения магнитного поля статора [  ]
]
Из упрощенной схемы замещения АД (по аналогии с трансформатором)
I2/=  , где XK=X1+X2/;
, где XK=X1+X2/; 
Приравняв мощности, подставив и преобразовав вышеприведенные значения величин получим выражение момента АД:
М=  , где XK=X1+X2/; или М=
, где XK=X1+X2/; или М= 
Отметим, что при U1ф=const M зависит от S.
По этой формуле, задаваясь S(от 0 до 1) можно построить характеристики M(S), а зная n=n0(1-S) можно построить n(M).

Эти характеристики называются механическими характеристиками АД. [M=f(S), n=f(M)]
 Если в выражении момента АД все величины постоянны, а U1ф(напряжение сети) меняется, то M=U1ф2 и механические характеристики будут иметь вид:
Если в выражении момента АД все величины постоянны, а U1ф(напряжение сети) меняется, то M=U1ф2 и механические характеристики будут иметь вид:

 | |||
| |||
|
|
ПУЭ допускает отклонение UC на ±5%, т.к. при увеличении UC увеличивается Q, что снижает cosφ, а при уменьшении UC увеличиваются потери из-за увеличения скольжения при одном и том же М.
Построение механических характеристик АД
На приведенных рание характеристиках M(S), n(M) обозначены характерные точки (а, б, в, г).
“а” – момент пуска АД; S=1,n=0,M=Mп, f2=f1S=f1..
“б” – критическая точка, соответствующая наибольшему моменту; S=SK,n=nK,M=Mk,f2=f1SK
“в” – номинальный режим;S=SH,n=nH,M=MH,f2=f1SH
“г” – ИХХ;S=0,n=n0,M=0,f2=f1S=0
аб – участок неустойчивой работы АД
бг – участок устойчивой работы АД
Значение МП получим, подставив в исходную формулу момента значение S=1
МП=  Продиференцировав исходную формулу момента и приравняв
Продиференцировав исходную формулу момента и приравняв  получим SK
получим SK
SK=  , т.к. ХК2>>r12, то SK≈
, т.к. ХК2>>r12, то SK≈  . Подставив SK в исходную формулу момента получим МК.
. Подставив SK в исходную формулу момента получим МК.
 МК=
МК= 
|
|
|
 IПУСК уменьшается, что хорошо, хотя и увеличиваются потери в rР.
IПУСК уменьшается, что хорошо, хотя и увеличиваются потери в rР.
Для построения естественной характеристики M(S) пользуются каталожными или паспортными данными δ;λ;РН;nH, где δ=МП/MH, λ=MK/M1H, MH=  , M[H·м]
, M[H·м]
P[кВт],n[об/мин], а также упрощенной формулой или Клосса М=  , где SK=SH(λ+
, где SK=SH(λ+  .
.
Для искуственной M(S) МР=  , где SKP=SK
, где SKP=SK  ; SP=S ; λ=1,6
; SP=S ; λ=1,6  2,5; δ=1 1,6
2,5; δ=1 1,6
r2 – из каталога; rP – задаются
Если МП≤МС, то пуск невозможен, надо вводить rP, если же МС≥МК, то пуск АД вообще невозможен.
Лекция № 11
Круговая диаграмма АД. Основные понятия
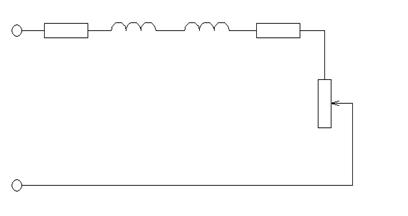
Рассмотрим электрическую цепь U=  Uа=Ir; UL=IX
Uа=Ir; UL=IX
|
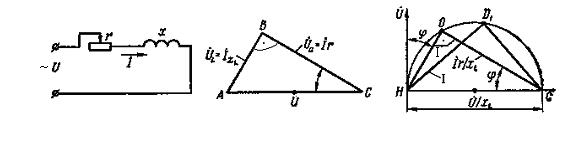
Изобразив эти напряжения, векторами получим ∆ напряжений АВС. Разделив каждую сторону ∆ АВС на Х, получим ∆ НДС, в котором катет НД изображает вектор тока  . Под
. Под  к вектору в положительном направлении оси ординат проведем вектор
к вектору в положительном направлении оси ординат проведем вектор  (т.к. на индуктивности U1 опережает
(т.к. на индуктивности U1 опережает  ). Изменив r в цепи изменится I, а катеты ∆НДС займут новое положение НД1 и Д1С, но гипотенуза
). Изменив r в цепи изменится I, а катеты ∆НДС займут новое положение НД1 и Д1С, но гипотенуза  останется неизменной. Т.е. новый режим работы электрической цепи будет определен на диаграмме положением точки Д1.Изменяя r в широких пределах, получим окружность с Ф=U/x описываемую точкой Д.
останется неизменной. Т.е. новый режим работы электрической цепи будет определен на диаграмме положением точки Д1.Изменяя r в широких пределах, получим окружность с Ф=U/x описываемую точкой Д.
При r=0 (чисто индуктивная нагрузка) точка Д совпадает с точкой С; при r =∞ I=0, точка Д совпадает с Н.
При любом другом значении r положения конца вектора I (точка Д) будет на окружности НДС – окружность токов.
Схема замещения АД (рис 1) содержит 2е ветви: намагничивающую ветвь с током I0 и главную (рабочую) с током I2/.
Намагничивающую цепь вынесли перед r1,x1,u, чтобы I0 не изменялся включили в неё r1 и х1.
Обе ветви работают как бы независимо друг от друга.

|

|
|
 При изменении S изменяется режим работы этой главной ветви т.е. положение конца Д вектора тока I (см рис в). Совмещением диаграмм рис 2 и рис в получим круговую диаграмму АД (рис 3), на которой
При изменении S изменяется режим работы этой главной ветви т.е. положение конца Д вектора тока I (см рис в). Совмещением диаграмм рис 2 и рис в получим круговую диаграмму АД (рис 3), на которой 
Рис.2 Рис.3
Построение круговой диаграммы АД по опытам ХХ и КЗ
Для построения круговой диаграммы АД необходимо знать:
- напряжение сети (фазное) U1
- ток ХХ (фазный) I0
- угол сдвига фаз между U1 и I0 при ХХ – φ0
- ток КЗ I1K
- угол сдвига фаз в режиме КЗ между напряжением U1 и током I1K ψK
- активное сопротивление фазы обмотки статора r1
|
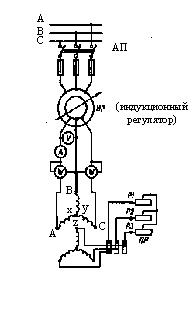
Эти параметры определяют по опытам ХХ и КЗ(схема ниже для АД с фазным ротором).
Опыт ХХ: ИР или 3ф АТ регулирует U1 от 0 до 1,1 UH. При хх. М2=0; U=U1н по показаниям А и V и W определяем I0,U1,P0 P0=P1+P2
cosφ0= 
Опыт КЗ: схема та же но ротор затормаживают и от 0 увеличивают U1 до величины при которой U1K=(0,15 0,3)U1н когда I=I1H и определяем I1H, U1K, PK=P1+P2,
|

|
 )
)
Лекция №12.
Построение окружности токов круговой диаграммы.
- проводим оси координат
- вектор U1н из точки 0 вверх (в масштабе  )
)
- выбирают масштаб  ,
,
- проводят  под
под  к U1н (точка Н),
к U1н (точка Н),
- проводят  под
под  к U1н (точка К),
к U1н (точка К),
- проводят НК,
- проводят НС параллельно оси абсцисс,
- делят НК пополам (точка М),
- из М перпендикулярно к НК проводят пунктир МО2 (до пересечения с НС),
- из О2 радиусом О2Н проводят окружность токов.
Применение круговой диаграммы для определения параметров двигателя.
Определение токов. Из точки О в масштабе токов откладываем вектор номинального тока статора I1н так, чтобы конец его (т. Д) лежал на окружности токов.
 [мм]
[мм]
- соединить Д с Н получим  токов ОДН, стороны которого определят
токов ОДН, стороны которого определят
токи:

 ;
;  ;
;  ;
;
- опустим перпендикуляр Да из Д на ось обсцисс и получим
прямоугольник.  ОДа, из которого определяем активную и
ОДа, из которого определяем активную и
реактивную составляющие тока статора:
 ;
;  ;
;
Подведенная мощность Р1. Известно  , но так как U=const., а
, но так как U=const., а  , то
, то  поэтому P1=mp * Да, где
поэтому P1=mp * Да, где  - масштаб мощности
- масштаб мощности  .
.
Подведенную мощность отсчитывают от линии абсцисс, которую называют линией подведенной мощности.
Полезная мощность Р2. Ее отсчитывают от окружности токов до прямой, соединяющей точки на окружности токов, в которой полезная мощность Р2=0.
Такой прямой будет НК (так как в Н и К Р2=0, т.е. в режимах Х.Х. и К.З.). То есть НК – линия полезной мощности.  .
.
Электромагнитная мощность и электромагнитный момент. Величина электромагнитной мощности определяется положением линии электромагнитной мощности. Для ее построения надо через точки на окружности токов провести линии, в которых эта электромагнитная мощность равна 0 (точки Н и Т). Н получаем из опыта Х.Х.  , а вторая Т при
, а вторая Т при  (эту не получим), поэтому строим по Н и К2. К2 определяется путем деления КК3 на две части в отношении:
(эту не получим), поэтому строим по Н и К2. К2 определяется путем деления КК3 на две части в отношении:
 , где
, где 
r1 – активное сопротивление 1-й фазы статора АД.
Для точки Д  .
.
Электромагнитный момент АД.
 ,
,
или  , где
, где  [нм/мм],
[нм/мм],
НТ – это линия электромагнитной мощности и линия электромагнитных моментов.
Коэффициент мощности. Для определения  на оси ординат строят полуокружность произвольного диаметра с центром в точке О’, но так, чтобы она проходила через О. Тогда
на оси ординат строят полуокружность произвольного диаметра с центром в точке О’, но так, чтобы она проходила через О. Тогда  , а для удобства диаметр равен 100мм, тогда
, а для удобства диаметр равен 100мм, тогда  .
.
Скольжение. Через Н перпендикулярно оси абсцисс проводим НoQ и из Q параллельно линии электромагнитной мощности проводим QE до пересечения с линией полезной мощности. QE делят на сто равных частей и получают шкалу скольжений.
Для точки Д значение S определяется продолжением НД до пересечения с линией скольжения QE (точка S).
КПД АД. Известно  ;
;  ; тогда
; тогда  (но это дает
(но это дает
большую ошибку, так как при этом не учитываются добавочные потери).
Перегрузочная способность АД. Для определения Мтах надо провести линию из О2 перпендикулярно линии электромагнитной мощности до пересечения с окружностью токов (точка q). Затем из q параллельно U1н провести линию до пересечения с линией электромагнитной мощности (точка n). Тогда qn в масштабе моментов определит величину Мтах:

 .
.
Эта формула для точки Д (если она соответствует нормальному режиму работы).
Начальный пусковой момент. Он определяется положением на окружности токов точки при  (точка К).
(точка К).
Тогда пусковой момент  .
.
Построение рабочих характеристик. Задаваясь различным значением токов статора, например  , и отметив на окружности токов точки Д1, Д2, Д3 и т.д., определяют данные, необходимые для построения рабочих характеристик АД, т.е.
, и отметив на окружности токов точки Д1, Д2, Д3 и т.д., определяют данные, необходимые для построения рабочих характеристик АД, т.е. 
 .
.

Лекция №13.
Пусковые свойства АД.
Пусковые свойства АД оцениваются его пусковыми характеристиками:
а) величиной пускового тока IП или его кратностью  ;
;
б) величиной пускового момента МП или его кратностью  ;
;
в) продолжительностью и плавностью пуска двигателя в ход;
г) сложностью пусковой операции;
д) экономичностью пусковой операции (стоимостью и
надежностью аппаратуры).
Из схемы замещения Г-образной, т.е. пренебрегая I0. определим IП при S=1.
|


|

|

|
 .
.
 ;
;  ;
;
Из выражения IП и 
следует, что улучшить пусковые свойства АД можно путем увеличения
 (активного сопротивления в цепи фазного ротора), т.к. при этом уменьшается
(активного сопротивления в цепи фазного ротора), т.к. при этом уменьшается
IП и увеличивается МП. (Это легко видеть из IП и не совсем из МП), надо
 , а
, а 

Уменьшение U1 благоприятно влияет на уменьшение IП, но и уменьшает МП. Поэтому возможность применения того или другого способа улучшения пусковых характеристик определяется условиями эксплуатации и требованиями, которые к нему предъявляются.
Пуск АД с контактными кольцами.
Путем ввода в цепь фазного ротора добавочного активного сопротивления rд увеличивают  , чем уменьшают IП и увеличивают МП.
, чем уменьшают IП и увеличивают МП.
Причем  имеет вид, где МП max при
имеет вид, где МП max при  .
.
Это видно из анализа формулы  ;
;

Считаем, что 28.6, r1, х1, х2’, no = const и считаем, что подтверждает вид
 .
.
Примем тогда 
r1=x1=1; x2/=2, а R2/=0.5,1,2,3,4 и тогда
 ;
;
 ;
;  ;
;
 ;
;  ;
;
Т.о. при выборе rд’ исходят из величины нагрузочного момента. При большом моменте rд’ должна быть такой, чтобы обеспечить МПmax. При малых моментах rд’ должна быть больше той, которой соответствует МПmax, т.к. у нас
МП невелик, IП значительно уменьшится.
Приведем схему пуска АД с контактными кольцами и механические характеристики.


Рычаг включения Rд надо переключать быстро, т. к. работы рассчитаны на малый ток.
 ;
;
Величины rд выбирают такими в случаях, что  ;
;
Преимущества – IП – мал, МП – велик.
Недостаток - потери  , сложность. После пуска АД продолжительность и неэкономичность с фазным ротором как АД с КЗ ротором.
, сложность. После пуска АД продолжительность и неэкономичность с фазным ротором как АД с КЗ ротором.
Пуск АД с короткозамкнутым ротором.
а) Прямой (непосредственное включение в сеть) пуск.

Преимущества: Прост, быстр, экономичен.
Недостаток: Велик IП, садит U сети, может сработать защита.
Поэтому он для Р=15-20 кВт. Но если есть мощная, то и Р>20 кВт.
 Пуск при U<U сети (т.е. при пониженном напряжении).
Пуск при U<U сети (т.е. при пониженном напряжении).
|
Их несколько, но все сопровождаются уменьшением IП. Что хорошо.
а) Переключением обмотки статора со звезды на треугольник (у которой обмотки статора включены треуголником).
Порядок: включить Р1, включить Р2 в положение 1 и после уменьшения броска тока Р2 в положение 2 (при этом уже бросок невелик).
Определим во сколько раз  треугольника больше
треугольника больше  звезды.
звезды.
 .
.
 ; тогда
; тогда  .
.
Т.е. при пуске со звезды на треугольник Iл в 3 раза уменьшается, это тоже преимущество. А Uф уменьшается в  , а момент
, а момент  , т.е. уменьшается в 3 раза – это недостаток.
, т.е. уменьшается в 3 раза – это недостаток.

|
б) Реакторный пуск.
|
Порядок пуска: Включаем Р1, а после разгона Р2 (реактор шунтируется).
Уменьшение напряжения на jI1xр, т.е.  вызывает уменьшение
вызывает уменьшение  .
.
Недостаток: МП уменьшается в  .
.
 ,
,  .
.  с реактором,
с реактором,  без реактора.
без реактора.
в) Автотрансформаторный пуск.

|
 пониженном и
пониженном и  на выходе латра.
на выходе латра.
|
|
 уменьшается в
уменьшается в  раз по сравнению с IП без латра. Это объясняется тем, что в понижающем латре I1 в Ка раз меньше I2, поэтому уменьшение
раз по сравнению с IП без латра. Это объясняется тем, что в понижающем латре I1 в Ка раз меньше I2, поэтому уменьшение  при автотрансформаторном пуске уменьшается в
при автотрансформаторном пуске уменьшается в  раз. Затем Р1 размыкают и получается как реактор, при этом U1АД повышается, включая Р3 подаем U1Н на АД.
раз. Затем Р1 размыкают и получается как реактор, при этом U1АД повышается, включая Р3 подаем U1Н на АД.
Итак:  ; Мощность латра
; Мощность латра  ;
;
где IП – ток без латра.
Лекция №14.
Короткозамкнутые АД с улучшенными пусковыми характеристиками.
а) глубокопазные короткозамкнутые АД.
Неудовлетворительные пусковые свойства АД с к.з. ротором (большие  и малые МП) привели к необходимости создания к.з. АД с улучшенными пусковыми свойствами: (большим МП и относительно малыми IП). В частности к.з. АД с глубоким пазом отличается от обычного АД с к.з. ротором конструкцией паза. Пазы ротора представляют собой глубокие узкие щели, в которых располагается беличья клетка.
и малые МП) привели к необходимости создания к.з. АД с улучшенными пусковыми свойствами: (большим МП и относительно малыми IП). В частности к.з. АД с глубоким пазом отличается от обычного АД с к.з. ротором конструкцией паза. Пазы ротора представляют собой глубокие узкие щели, в которых располагается беличья клетка.
 , где hn - высота, вn - ширина паза.
, где hn - высота, вn - ширина паза.

Принцип действия: В момент включения АД, когда частота тока в роторе  т.е. равна частоте сети, т.е. максимальна, индуктивное сопротивление нижней части стержня значительно больше, чем верхней. Это объясняется тем, что нижняя часть стержня сцеплена с большим числом линий магнитной индукции потока рассеяния (см. рисунок), т.е. величина
т.е. равна частоте сети, т.е. максимальна, индуктивное сопротивление нижней части стержня значительно больше, чем верхней. Это объясняется тем, что нижняя часть стержня сцеплена с большим числом линий магнитной индукции потока рассеяния (см. рисунок), т.е. величина  вытесняет ток к верхней части паза.
вытесняет ток к верхней части паза.
 , так как f2 в момент пуска при S=1 максимальна и равна f1.
, так как f2 в момент пуска при S=1 максимальна и равна f1.
Из формулы тока  , вытекающей из упрощенной
, вытекающей из упрощенной
Г-образной схемы замещения
