АБАКАН, 2020
СОДЕРЖАНИЕ:
1. Введение…………………..............................................................3
2. Цель, задачи, актуальность робота по сортировке мусора..........4
3. Принцип управления робота по сортировке мусора ….………...5
4. Заключение…………………………………………………………7
5. Список используемой литературы………………………………..8
Введение.
Мы живем во времена высоких технологий, наука и техника не стоит на месте, постоянно создаются новые, все более совершенные роботы для различных областей жизни.
В прошлом году я разрабатывал робототехническое устройство, с точки зрения социального аспекта – это был ступенеход, как средство для перемещения инвалидного кресла – коляски. В этом году решил разработать робототехническое устройство, с точки зрения экологического аспекта.
Человек производит материалы, которые в природе могут разлагаться 20, 50 и 150 лет, вопрос их вторичного использования после переработки становится все более и более актуальным. Работа по переработке мусора не является престижной, она трудная, но важная, и применение роботов в данной технологии является актуальным, именно поэтому, используя конструктор с чипом (см. фото) я решил создать машину, сортирующую бытовые отходы.


Цель, задачи, актуальность робота по сортировке мусора
Актуальность этого устройства заключается в том, что оно послужит на практике помощником по сортировке различного вида мусора, ускорит процесс сортировки и сэкономит затраты на сотрудниках.
Цель проекта - сконструировать робота, который будет автоматически сортировать бытовые и промышленные отходы.
Задачи:
1.Изучить литературу, для анализа способов сортировки.
2. Провести проектирование и конструирование мобильного робота с совместным применением датчиков освещенности, расстояния и касания, который передвигается по плоскости, сортирует предметы, поднимает и опускает их.
3. Провести программирование созданной модели на компьютере, исследовать работу датчика и моторов и установить программу на контроллер робота.
4. Протестировать робототехническое устройство.
Методы исследования: исследования проводятся при изменении параметров датчика в программе компьютера и анализом поведения робота, корректировка конструкции модели. Методы, используемые мною: теоретический и практический.
Теоретический - изучение научно популярной литературы и материал сайтов Интернет.
Практический - проектирование, конструирование, и программирование робототехнического устройства.
Средства исследования: конструктор - EV3, с программным обеспечением – Mindstorm EV3
Принцип управления робототехнического устройства
Работа над проектом ограничена наличием крепежных деталей, датчиков и возможностью контроллера конструктора.
Для программирования мобильного робота я использовал графический язык программирования, на основании которого задал алгоритм устройству.
Согласно заданного алгоритма робот должен двигаться при помощи двигателя на гусеничной основе.
На роботе должно быть размещено три и более датчика выполняющее различные функции, параметры которых устанавливаются при помощи программного обеспечения.
Робот должен выполнять все заложенные функции автономно, без связи с компьютером по проводам и передвигаться.
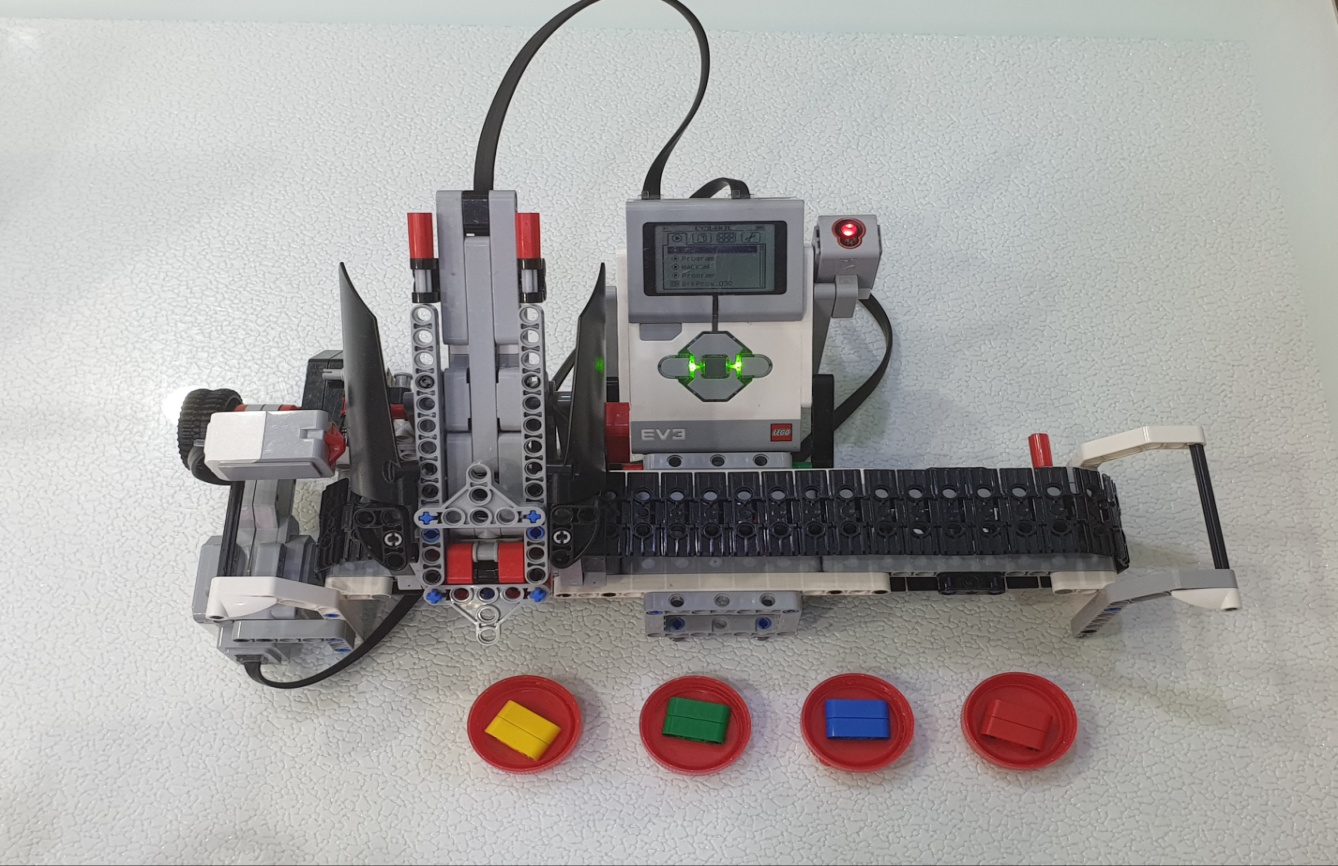
Устройство захватывает предметы и переносит их в определенное место (мусоропровод), в мусоропроводе происходит сканирование мусора и сортировка по контейнерам. Для распознавания определенного контейнера, ему задается порядковый номер.
Для демонстрации своего мобильного робота по сортировке мусора, в качестве бытовых отходов, я использую детали конструктора разного цвета, например: синий (пластик); желтый (стекло); красный (бумага); зеленый (пищевые отходы).
Контейнерам на определенный вид отходов задается свой номер, например: пластик (№1); стекло (№2); бумага (№3); пищевые отходы (№4).
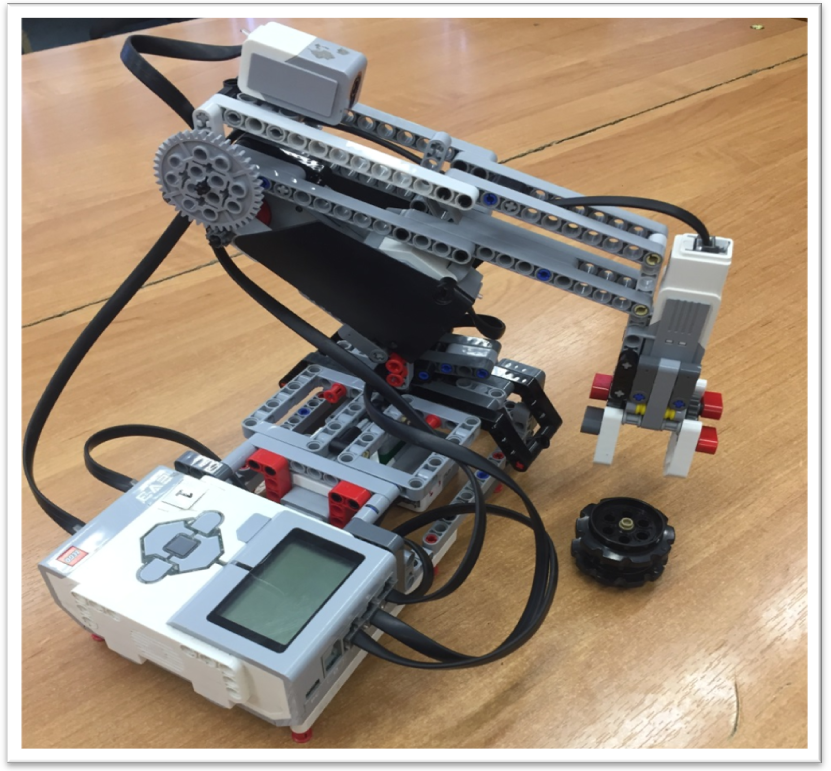
С помощью робота – манипулятора происходит загрузка мусора в мусоропровод.
Модель из базового образовательного набора LEGO Mindstorms EV3 Education
Заключение
Занимаясь технотворчеством я узнаю много нового и интересного, а благодаря различным конструкторам пытаюсь разрабатывать модели, которые возможно применить для удобства и комфорта в различных сферах общественной жизни.
При помощи имеющегося в наличие конструктора можно собрать и запрограммировать модель робототехнического устройства, которое в последствии, можно реализовать в промышленную установку для использования в реальных условиях, заменив труд человека.
В результате работы над проектом я сконструировал робота – манипулятора и робота-сортировщика, исследовал выполнение ими определенных функций, протестировал работу модели на созданной программе с помощью языка Mindstorm EV3, и выяснил, что робототехническое устройство работает согласно заложенным командам, то есть при определенных условиях, робот может сортировать, захватывать, и переносить объект, то есть выполнять работу человека.
В перспективе я думаю сконструировать модель робота, которого можно будет использовать и в домашних условиях для сортировки объектов.
Литература
1. Филиппов С.А. Робототехника для детей и родителей – М.: Наука, 2011 г.(2 и 3-е издания) (учимся программировать);
2. Рейд С., Фара П. «История открытий», М., 1999 г.
3. Русецкий А.Ю. «В мире роботов». М., Просвещение., 1990 г.
Интернет-источники:
1. https://ru.wikipedia.org/wiki/Робот
2. https://robototechnika.ucoz.ru/pdf/spravka_po_po_lego.pdf
3. https://robot70.narod.ru/index/0-10
4. legoleaguecoaching.org