КОНТРОЛЬНАЯ РАБОТА
"Трехфазный асинхронный двигатель"
Введение
Асинхронной машиной является электромеханический преобразователь, в котором возникновение момента на валу ротора возможно лишь при различных скоростях вращения магнитного поля и ротора.
Асинхронные машины наибольшее распространение получили как двигатели. Это основной двигатель, применяемый в промышленности, сельском хозяйстве и в быту. Только асинхронных двигателей единых серий мощностью от 0,6 до 400 кВт в нашей стране ежегодно выпускается около 10 млн. Асинхронных микродвигателей мощностью от 0,6 кВт изготовляется несколько десятков миллионов в год.
Электротехническая промышленность выпускает асинхронные двигатели в большом диапазоне мощностей. Предельная мощность асинхронных двигателей – несколько десятков мегаватт. В индикаторных системах применяются асинхронные двигатели мощностью от долей ватта до сотен ватт. Частота вращения двигателей общего назначения – от 3000 до 500 об/мин.
В генераторном режиме асинхронные машины применяются редко. Для создания поля в зазоре асинхронной машины необходима реактивная мощность, которая забирается из сети или от других источников реактивной мощности. Асинхронные двигатели не могут работать с cosц=1. Это существенный недостаток асинхронных машин, ограничивающий их применение в генераторном режиме.
При электромеханическом преобразовании энергии в асинхронных машинах, как и в других машинах, происходит преобразование энергии а тепло. Электрические потери в роторе асинхронной машины пропорциональны скольжению. Чтобы большая часть электрической энергии преобразовывалась в механическую, асинхронные машины используются в электроприводах, где допустимо небольшое скольжение (s= = 1–4%). При глубоком скольжении (s=10–50%) асинхронные машины используются редко, так как в это случае большая часть мощности, забираемой из сети, преобразуется в тепло, что приводит к низкому КПД и увеличению габаритов асинхронной машины из-за трудностей, связанных с отводом тепла от активных частей машины.
Наличие в роторе потерь, пропорционально зависящих от скольжения, – одна из особенностей асинхронных машин, обусловливающих их отличие от других типов электрических машин.
Если обмотки ротора представляют собой замкнутые контуры, то при скольжении s=1 вся мощность, поступающая на ротор, преобразуется в тепло. При скольжении s=0 мощность на ротор не поступает. При скольжениях, отличных от 0 и 1, электромагнитная мощность преобразуется в двигательном режиме в механическую мощность и в тепло, а в генераторном режиме – в электрическую и в тепло.
В конструктивном исполнении асинхронные двигатели – наиболее простые, они получили наибольшее распространение.
1. Расчёт характеристик трехфазных асинхронных двигателей
1. Рассчитать рабочие характеристики и построить зависимости частоты вращения n, вращающего момента М2, тока обмотки статора I1, потребляемой мощности P1 и коэффициента мощности cos ц1 в функции полезной мощности Р2.
2. Определить значения критического скольжения Sк, максимального Мmax и пускового Мп моментов двигателя и их относительных значений М*max и M*п.
3. Рассчитать и построить механическую характеристику двигателя М(S) для разных величин скольжения S. Скольжение рекомендуется представлять в процентах (долях единицы значений: S= S%/100). Величину С1 принять равной С1=1+ X1/Xм.
Расчет следует выполнить для значений скольжения S= (0,0025; 0,005; 0,01; 0,02; 0,025; 0,03; 0,2; 0,3).
4. Для каждой величины скольжения нужно определить:
– активные Iхха, реактивные Iххр, действующие Iххд, величины тока холостого хода, тока статора I1а, I1р, I1д, тока ротора I2а, I2р, I2д;
– мощности: потребляемую P1, преобразованную Pпр и полезную P2;
– коэффициент мощности cos ц1; к.п.д. з;
– угловую скорость n и момент нагрузки М2.
Исходные данные:
Номинальная мощность на валу Р2Н, кВт 30
Номинальное линейное напряжение U1Н, В 660
Синхронная угловая скорость n1, об/мин 750
Коэффициент полезного действия зН 90,5
Коэффициент мощности cos ц1 0,81
Активное сопротивление цепи намагничивания r*М 0,18
Индуктивное сопротивление цепи намагничивания х*М 2,15
Активное сопротивление обмотки статора r*1 0,030
Приведенное активное сопротивление обмотки ротора r2* 0,022
Индуктивное сопротивление обмотки статора х*1 0,073
Приведенное индуктивное сопротивление обмотки ротора х2* 0,17
Механические потери Рмех, кВт 0,37
Расчёт рабочих характеристик
Для расчёта используем Г-образную схему замещения асинхронного двигателя с вынесенным намагничивающим контуром. При этом определим поправочный коэффициент для заданной схемы:
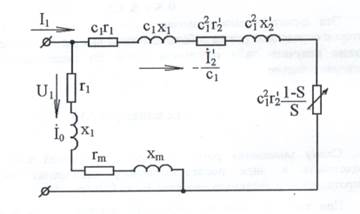
Рисунок 1. Схема замещения асинхронной машины в Г-образной форме