Фазное напряжение:
Приведённая мощность:


Добавочные потери определяем по формуле:

Фазный ток обмоток статора:

Заданные относительные сопротивления переводим в омические.
Коэффициент перевода электрических параметров из относительных единиц в именованные:

Найдём найденное сопротивление в именованных единицах. Определим активное сопротивление цепи намагничивания потери в стали:

Индуктивное сопротивление взаимоиндукции приведённой первичной и вторичной цепи:

Активное сопротивление обмотки статора в именованных единицах:

Индуктивное сопротивление обмотки статора в именованных единицах:

Активное приведённое сопротивление обмотки ротора в именованных единицах:

Определим индуктивное приведённое сопротивление обмотки ротора:

Определяем токи холостого хода ротора и статора.
Полное активное сопротивление рабочего контура:

Определим полное индуктивное сопротивление рабочего контура:

Таким образом полное эквивалентное сопротивление контура намагничивания определяем по формуле:

Определим 
Определим 
Определим действующее значение тока холостого хода статора:

Определим активную составляющую тока холостого хода:

Определим реактивную составляющую тока холостого хода:

Для заданной схемы определим поправочный коэффициент:
Для различных значений S рассчитываем:
1. Токи статора I1a, I1p, I1
2. Токи ротора I2a, I2p, I2
3. Коэффициент мощности cosj
4. Потребляемую мощность Р1
5. Полезную мощность Р2
6. Преобразованную мощность Рпр
7. Коэффициент полезного действия h
8. Угловую скорость n
9. Момент нагрузки на валу двигателя М2
Определим приведённое активное сопротивление обмотки статора по формуле:

Определим эквивалентное активное сопротивление рабочего контура:

Приведённое индуктивное сопротивление рабочего контура:
Полное приведённое сопротивление рабочего контура:
Определим коэффициент мощности при S=0,0025

Действующее значение тока ротора:

Активная составляющая тока ротора

Определим реактивную составляющую тока ротора:

Определим активную составляющую тока статора:

Реактивная составляющая тока статора:

Определим действующее значение тока статора:

Определяем добавочное приведённое активное сопротивление в цепи ротора:
Определяем полезную мощность на валу двигателя

где: 
Определяем угловую скорость магнитного поля статора:

Определяем угловую скорость магнитного поля машины:

Определяем момент нагрузки на валу двигателя:

Определяем потребляемую мощность машины:
Определим приведённое индуктивное сопротивление рабочего контура:

Выполняем расчеты при S= 0,0025; 0,005; 0,01; 0,02; 0,025; 0,03; 0,2; 0,3, результаты сводим в таблицу 3П (Расчет выполнен на компьютере с использованием программы Excel)
Таблица 1
| № п/п | Значение | Значение S | |||||||
| 0,0025 | 0,005 | 0,01 | 0,02 | 0,025 | 0,03 | 0,2 | 0,3 | ||
| R’2 | 100,1348 | 50,0674 | 25,0337 | 12,5168 | 10,01348 | 8,3446 | 1,251685 | 0,834456 | |
| R»2 | 100,4649 | 50,3975 | 25,3639 | 12,8470 | 10,34364 | 8,6747 | 1,581843 | 1,164615 | |
| Rпр | 99,8844 | 49,8170 | 24,7834 | 12,2665 | 9,76314 | 8,0942 | 1,001348 | 0,584119 | |
| Z»2 | 100,5022 | 50,4719 | 25,5112 | 13,1355 | 10,69983 | 9,0965 | 3,161932 | 2,975217 | |
| cos«2 | 0,9996 | 0,9985 | 0,9942 | 0,9780 | 0,96671 | 0,9536 | 0,500277 | 0,391439 | |
| I»2 | 3,7915 | 7,5498 | 14,9366 | 29,0093 | 35,61282 | 41,8898 | 120,5121 | 128,0751 | |
| I»2a | 3,7901 | 7,5387 | 14,8504 | 28,3722 | 34,42728 | 39,9475 | 60,28948 | 50,13354 | |
| I»2r | 0,1033 | 0,4095 | 1,6030 | 6,0464 | 9,112391 | 12,6077 | 104,3473 | 117,8552 | |
| I1a | 5,2979 | 9,0465 | 16,3582 | 29,8800 | 35,9352 | 41,4554 | 61,7974 | 51,6414 | |
| I1r | 16,0652 | 16,3715 | 17,5649 | 22,0083 | 25,0743 | 28,5697 | 120,3092 | 133,8172 | |
| I1 | 16,9162 | 18,7047 | 24,0024 | 37,1104 | 43,81845 | 50,3465 | 135,2524 | 143,4359 | |
| cos 1 | 0,3132 | 0,4837 | 0,6815 | 0,8052 | 0,820092 | 0,8234 | 0,456904 | 0,360031 | |
| Рпр | 4307,59 | 8518,58 | 16587,72 | 30968,22 | 37146,98 | 42610,26 | 43628,23 | 28744,33 | |
| Рдоб | 7,15 | 8,75 | 14,40 | 34,43 | 48,00141 | 63,37 | 457,3303 | 514,3466 | |
| P2 | 3930,44 | 8139,84 | 16203,32 | 30563,79 | 36728,98 | 42176,89 | 42800,9 | 27859,99 | |
| W1 | 104,667 | ||||||||
| W | 104,405 | 104,143 | 103,620 | 102,573 | 102,050 | 101,5267 | 83,73333 | 73,26667 | |
| М2 | 37,65 | 78,16 | 156,37 | 297,97 | 359,91 | 415,4267 | 511,1573 | 380,2546 | |
| Р1 | 6056,36 | 10341,58 | 18699,98 | 34157,48 | 41079,40 | 47389,88 | 70643,87 | 59034,06 | |
| h | 0,6490 | 0,7871 | 0,8665 | 0,8948 | 0,8941 | 0,889998 | 0,605869 | 0,471931 | |
| n | 997,5 |
По данным таблицы 1 строим рабочие характеристики асинхронного двигателя, требуемых зависимостей.

Рисунок 1(а). График рабочих характеристик асинхронного двигателя
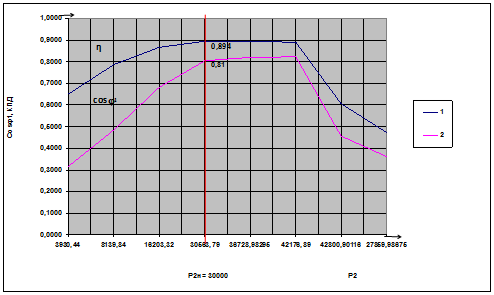
Рисунок 2(б). График рабочих характеристик асинхронного двигателя
По построенным графикам рабочих характеристик определяем расчётные номинальные значения М2н, зн, cosц1н, соответствующие заданному номинальному значению мощности P2н= 30кВт и сравниваем их со значением в таблице исходных данных 1.
М2н= 303,28 Нм; зн=89,4; cosц1н=0,817;
 ;
; 
Погрешность расчета для всех параметров не превышает 5%.
Определяем критическое скольжение:

Так как расчет выполняем для двигателя, то в формуле стоит +.
Определяем максимальный момент:

Определяем пусковой момент

b =r/(C*r)
Кратности пускового Мп и максимального Mmax, составляют:
Пользуясь формулой Клосса определяем электромагнитный момент для заданных значений скольжений S= (0,1…. 1,0).
Подставив в формулу различные значения S, проведём вычисления, результаты которых сведём в таблицу 2.
Таблица 2
| 0,091 | 0,1 | 0,3 | 0,5 | 0,7 | ||
| 752,56 | 749,64 | 439,32 | 285,17 | 209,28 | 149,06 |
По данным таблицы №2 строим механическую характеристику асинхронного двигателя.

Рисунок 2. График механических характеристик асинхронного двигателя (зависимость момента М от скольжения S
Заключение
Диапазон рабочих характеристик асинхронного двигателя соответствует его зоне устойчивой работы: 
Эта характеристика позволяет находить все основные величины, которые определяют режим работы двигателя при различных нагрузках. Их можно получить либо расчётным путём по схеме замещения, либо экспериментально.
Максимальный момент двигателя называют опрокидывающим моментом. При работе двигателя с величинами момента нагрузки, меньше максимального момента, но близкими к нему, случайная перегрузка двигателя приводит к его остановке и к как правилу к выходу его из строя.
По этой причине практически выбирают двигатель такой мощности, при которой выполняется неравенство:  , при этом обеспечивается мощность двигателя с запасом по мощности не менее 70%. При проведенных расчётах мы видим, что мощность двигателя, заданного в условии задачи соответствует этим условиям: Таким образом, выполняется главное условие выбора асинхронного двигателя, так как запас по мощности данного двигателя более чем 100%. Погрешность расчета для вех параметров не превышает 5%.
, при этом обеспечивается мощность двигателя с запасом по мощности не менее 70%. При проведенных расчётах мы видим, что мощность двигателя, заданного в условии задачи соответствует этим условиям: Таким образом, выполняется главное условие выбора асинхронного двигателя, так как запас по мощности данного двигателя более чем 100%. Погрешность расчета для вех параметров не превышает 5%.
трехфазный асинхронный двигатель рабочий
Список литературы
1. Брускин Д.Э., Зорохович А.Е., Хвостов В.С. «Электрические машины», Москва «Высшая школа», 1987 г.;
2. Винокуров В.А., Попов Д.А. «Электрические машины железнодорожного транспорта», Москва «Транспорт», 1986 г.;
3. Копылов И.П. «Электрические машины», Москва «Энергоатомиздат», 1986 г.;
4. Попов Д.А., Руднев В.Н. «Электрические машины» задание на контрольную работу с методическими указаниями, Москва, 1991 г.