Автоматического регулирования.
Свойства объектов регулирования»
Характеристики объектов регулирования
При решении задачи автоматизации объекта необходимо тщательное изучение его свойств, условий функционирования и эксплуатационных требований, предъявляемых к нему. Эти свойства оцениваются по его характеристикам, которые могут быть получены экспериментально или выведены аналитически.
Характеристикой объекта называется совокупность функций, величин, математических операций, правил и алгоритмов, при помощи которых заданному сигналу на входе объекта ставится в соответствии сигнал на выходе этого объекта.
Статические свойства объекта регулирования
Определяются установившимся режимом, при котором приток вещества или энергии в объект равен их расходу из объекта, т.е. при полном соблюдении материального и энергетического баланса. Основные параметры, характеризующие условия протекания технологического процесса (например, расход, давление, уровень, температура и т.д.) в установившемся режиме остаются неизменными. При этом, каждому значению входной величины объекта в установившемся состоянии соответствует определенное значение его выходной величины.
Пояснение. Таким образом, статические свойства объекта описывает его статическая характеристика, которая устанавливает однозначную зависимость выходной величины от входной величины в установившемся режиме.
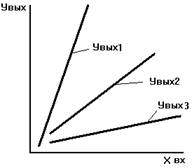 | 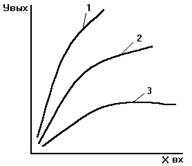 | ||
Статические характеристики объекта дают возможность оценить степень связи между различными входными и выходными величинами объекта. Статические характеристики могут быть как линейными 1 с различными коэффициентами наклона, так и нелинейными 2 (рис.3.13,а), причем большинство реальных объектов регулирования в целом имеют нелинейные статические характеристики.
а) б) в)
Рисунок 2.13. Статические характеристики объектов регулирования
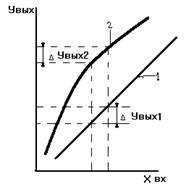
Семейство выходных величин увых 1, увых2 и увых3 (рис.2.13,б) от одной входной величины хвх показыве\ает, что выходная величина увых1 в большей степени зависит от входной величины хвх, чем другие выходные величины.
Если выходная величина увых объекта регулирования зависит от нескольких различных входных величин, то статическая характеристика будет представлять собой не одну кривую, а семейство кривых (рис.2.12,в). Кривая 1 отображает зависимость увых = f(хвх1); кривая 2 - увых = f(хвх2) и кривая 3 - увых = f(хвх3).
Пояснение. При построении статических характеристик регулирующий орган может либо включаться в состав объекта регулирования или не включаться. В зависимости от этого входной величиной может являться или положение регулирующего органа (регулирующий орган включен в объект) или величина, характеризующая регулирующее воздействие, т.е. расход энергии, топлива, холодильного агента, пара, воды (регулирующий орган не включен в объект).
Динамические свойства объекта
Отображают состояние объекта регулирования в результате воздействия на него внешней нагрузки – возмущения. При этом происходит отклонение регулируемой величины от заданного значения утек >< узад, и нарушение установившегося режима. Объект регулирования входит в неустановившийся режим работы вызванный возмущенным и переходным режимами.
Пояснение. Динамической характеристикой объекта регулирования называется зависимость изменения во времени выходной величины у объекта в переходном режиме. При этом предполагается, что неустановившийся (переходный) режим вызван однократным ступенчатым скачкообразным единичным возмущением входной величины (регулирующим воздействием или внешним возмущением). Динамическая характеристика объекта также называется кривой разгона и является временной характеристикой объекта.)
Кривая разгона объекта может быть получена экспериментальным путем, или рассчитана аналитически.
При экспериментальном способе получения кривой разгона регулятор отключается от объекта регулирования, а на вход объекта вручную вносится единичное ступенчатое воздействие.
Возмущающее воздействие и кривые разгона различных типов объектов, приведенные на рис. 2.14,а, аналитически может быть представлено в виде:
1, при t0 ³ 0;
 =
=
0, при t0 < 0,
Пояснение. Т.е. в момент времени  имеет место ступенчатое возмущение на объект регулирования, а в момент времени
имеет место ступенчатое возмущение на объект регулирования, а в момент времени  < 0 это возмущение отсутствует.
< 0 это возмущение отсутствует.
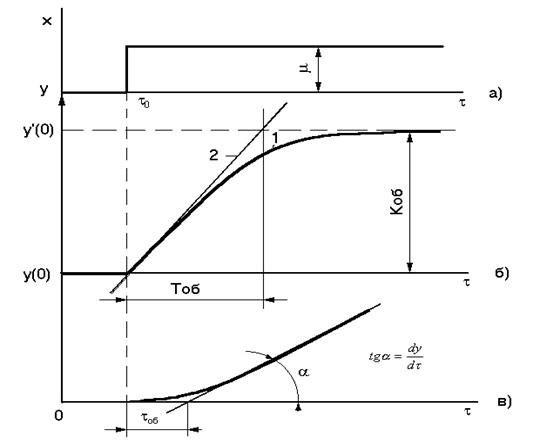 |
Рисунок 2.14. Кривые разгона и динамические параметры
объектов регулирования
Пояснение. В объектах с самовыравниванием, рис.2.14,б, скорость изменения выходной величины  постепенно уменьшается и асимптотически приближается к нулю, т.е. регулируемая величина стремится принять новое установившееся значение
постепенно уменьшается и асимптотически приближается к нулю, т.е. регулируемая величина стремится принять новое установившееся значение  =
=  . Такого рода кривая разгона 1 характерна для объекта, представляющего собой апериодическое (инерционное) звено первого рода, описываемое дифференциальным уравнением первого порядка.
. Такого рода кривая разгона 1 характерна для объекта, представляющего собой апериодическое (инерционное) звено первого рода, описываемое дифференциальным уравнением первого порядка.
По кривой разгона определяются динамические характеристики объекта регулирования, выраженные в параметрах: постоянной времени объекта  , запаздывание tоб и коэффициенте передачи
, запаздывание tоб и коэффициенте передачи  . Для того, чтобы получить значения величин этих параметров к кривой разгона, в точке максимальной скорости изменения выходной величины у, проводится касательная 2 в обе стороны до пересечения с линиями начального
. Для того, чтобы получить значения величин этих параметров к кривой разгона, в точке максимальной скорости изменения выходной величины у, проводится касательная 2 в обе стороны до пересечения с линиями начального  и нового установившихся значений выходной величины. )
и нового установившихся значений выходной величины. )
Пояснение. Для статических объектов (объектов с самовыравниванием), отрезок времени от момента t1 пересечения касательной с линией начального установившегося значения выходной величины (осью абсцисс) до момента t2 – ее пересечения с линией нового установившегося значения , определяет постоянную времени объекта.
Постоянная времени объекта – это условное время, в течение которого выходная величина объекта регулирования изменялась бы от начального до нового установившегося значения, если бы это изменение будет происходить с постоянной и максимальной для данного переходного процесса скоростью.
Пояснение. Постоянная времени характеризует инерционность объекта, под которой понимается его способность замедленно накапливать и расходовать вещество или энергию, что является возможным благодаря наличию в составе объекта регулирования сопротивлений и емкостей, препятствующих поступлению и выходу этого вещества или энергии.
Величина при наличии возмущения определяет продолжительность переходного процесса и крутизну кривой нарастания параметра .
Пример. В домашнем холодильнике имеющего малый объем и, следовательно малую аккумулирующую способность, продолжительность переходного процесса будет меньше, чем у холодильников промышленного типа, имеющих больший объем.
При = 0, т.е. в объектах не имеющих емкости, при наличии возмущения величина мгновенно изменяет свой значение, что соответствует уравнению  .
.
При > 0, длительность переходного процесса  теоретически равна бесконечности, но с достаточной для практики точностью можно считать, что выходная величина приближается к своему новому установившемуся значению через период времени, равной
теоретически равна бесконечности, но с достаточной для практики точностью можно считать, что выходная величина приближается к своему новому установившемуся значению через период времени, равной
» 3…4
Для астатических объектов, динамическая характеристика (кривая разгона) которых имеет вид, представленный на рис. 2.14,в, пользуются условной постоянной времени , которую определяют как время изменения при единичном возмущении.
Пояснение. Большинство объектов описывается дифференциальным уравнением первого порядка, однако объекты могут описываться уравнениями и более высокого (например, второго) порядка, иметь большее число постоянных времени, что определяется количеством емкостей объекта. Кривая разгона, в этом случае (рис. 2.15), представляет собой монотонную кривую, характерной точкой является точка А перегиба характеристики, соответствующая моменту времени tп изменения знака второй производной (в т.А).
В этом случае постоянную времени объекта можно рассматривать как сумму постоянных времени двух апериодических (инерционных) звеньев с постоянным временем  и
и  :
:
= + .
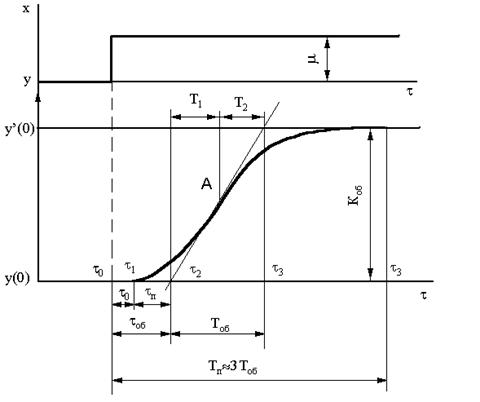 |
Рисунок 2.15. Кривая разгона двухемкостного объекта.
Запаздывание t0 – отображает изменение выходной величины у объекта регулирования с некоторым отставанием во времени с момента внесения возмущающего воздействия.
Если объект состоит из нескольких емкостей вследствие передачи небаланса между расходом и притоком энергии или вещества от емкости к емкости возникает переходное запаздывание tп, выражающееся в том, что регулируемая величина изменяет свое значение не сразу, после появления небаланса (возмущения), а спустя некоторый интервал времени t2-t1 (рис.3.15).
По величине переходное запаздывание зависит от количества последовательно соединенных емкостей в объекте и величины каждой отдельной емкости.
Пример. Так, при изменении температуры воздуха в камере потребуется некоторое время на охлаждение потолка, стен, пола и предметов находящихся в ней, после чего в камере начнет изменяться температура воздуха до установки нового установившегося значения.
В некоторых сложных объектах может наблюдаться отставание изменения выходной (регулируемой) величины по времени, вызванное тем, что объект содержит звено с запаздыванием. В этом случае в течение некоторого времени регулируемая величина у не будет изменяться вообще. Отрезок времени между началом перемещения регулирующего органа и тем моментом, когда его действие начинает сказываться на выходнй величине объекта (интервал времени t0-t1), называется емкостным запаздыванием t0. Емкостное и переходное запаздывания в сумме составляют полное запаздывание объекта регулирования tоб=t0+tп.
Пояснение. Запаздывание отрицательно сказывается на свойствах системы регулирования, так как регулятор начинает уменьшать небаланс энергии или вещества спустя время t0 после его появления.
Величина отношения запаздывания tоб к постоянной времени является характерным показателем динамических свойств объекта и условий регулирования. В общем случае, чем меньше tоб/ , тем благоприятнее условия для регулирования и чем это отношение больше, тем условия для регулирования труднее.
Коэффициент передачи Коб статического объекта (рис.2.15) представляет собой отношение изменения выходной величины объекта при переходе из начального в новое установившееся состояние к единичному возмущению на входе. За единичное возмущение, например, может быть принято изменение входной величины объекта на 1% (перемещение регулирующего органа, расхода регулирующей среды и т.п.).
Коэффициент передачи, таким образом будет равен:
 ,
,
где – значение выходной величины в начальном установившемся состоянии;
– то же, но для нового установившегося состояния;
 – величина вносимого возмущения, % хода регулирующего органа.
– величина вносимого возмущения, % хода регулирующего органа.
Коэффициент передачи определяется по кривой разгона.
Для астатических объектов используется условный коэффициент передачи  , определяемый по кривой разгона как установившееся значение скорости изменения выходной величины при единичном возмущении. Тангенс угла наклона касательной к оси абсцисс (рис.3.14,в) определяет скорость изменения входной величины . Таким образом, коэффициент передачи астатического объекта:
, определяемый по кривой разгона как установившееся значение скорости изменения выходной величины при единичном возмущении. Тангенс угла наклона касательной к оси абсцисс (рис.3.14,в) определяет скорость изменения входной величины . Таким образом, коэффициент передачи астатического объекта:
 .
.
Пояснение. Зная динамические характеристики объекта регулирования ,  , , входную величину
, , входную величину  , а также и можно подобрать тип автоматического регулятора и определить приближенно его настройки.
, а также и можно подобрать тип автоматического регулятора и определить приближенно его настройки.
Для получения кривой разгона объекта аналитическим путем составляется его дифференциальное уравнение и проинтегрировав осуществляется его решение.
Пусть объект регулирования апериодическое (инерционное) звено первого порядка (одноемкостной объект) с запаздыванием и описывается дифференциальным уравнением вида
 . (2.1)
. (2.1)
Проинтегрировав выражение (2.1) получим:
 . (2.2)
. (2.2)
Задаваясь текущим значением времени  , получим, что соответствующие им значения выходной величины
, получим, что соответствующие им значения выходной величины  приближаются к новому установившемуся значению и асимптотически приближаются к бесконечности. В уравнении
приближаются к новому установившемуся значению и асимптотически приближаются к бесконечности. В уравнении  - это основание натурального логарифма.
- это основание натурального логарифма.
Пример. рассмотрим холодильную камеру, (рис.2.16) с параметрами - расход холодильного агента на испаритель  , а - температура воздуха в камере -
, а - температура воздуха в камере -  и действующим на нее возмущением F.
и действующим на нее возмущением F.
 |
DGa Dtв
Рисунок 2.15. Холодильная камера, как объект автоматического регулирования
Тогда, для такого объекта, дифференциальное уравнение запишется в виде
 , (2.3)
, (2.3)
а его решение:
 , (2.4)
, (2.4)
при коэффициенте передачи:
 . (2.5)
. (2.5)
В качестве возмущения F могут быть приняты внешние и внутренние теплопритоки, действующие на холодильную камеру.
5.3. Холодильная установка как объекта автоматизации
В практике регулирования холодильных установок обращается главным образом внимание на регулирование температуры воздуха tв в холодильной камере. Тепловая нагрузка холодильных камер зависит от температуры наружного воздуха, а также количества и ассортимента хранящегося груза. Эта нагрузка является нестационарной и подвержена колебаниям. Охлаждающие батареи должны поддерживать заданную температуру в камере при наибольшей тепловой нагрузке.
Функциональная схема холодильной установки, как объекта автоматизации, приведена на рис.2.16.
Рисунок 2.16. Функциональная схема холодильной установки
На объект регулирования ОР (холодильную камеру) воздействует тепловой приток Qт, подводимый из вне или выделяющийся внутри объекта. Холодильная машина отводит за единицу времени количество теплоты Qо потребляя энергию Е от внешнего источника для вывода теплоты Qк= Qо+Е в охлаждающую среду (конденсатор).
Пояснение. Выполнение основной задачи автоматизации поддержание температуры tв в холодильной камере в заданных пределах – сводится к тому, чтобы обеспечить соответствие между количеством теплоты Qт подводимой к ХК и количеством теплоты Qо отводимой от нее. Принципиально этого можно добиться путем изменения Qт или Qо. Однако, изменение Qт достаточно сложно и энергетически не выгодно; в практических условиях используется только изменение Qо.
Внешний теплоприток Qт является переменной величиной и зависит от времени года, суточного колебания температуры и т.д. Изменение Qт приводит к отклонению температуры tв от заданного значения, в этом случае требуется такое изменение теплового потока Qо, которое компенсировало бы появившееся возмущение.
Статические характеристики холодильной камеры представленные на рис. 2.17, устанавливают зависимость подвода теплоты Qт в холодильную камеру в функции от регулируемой
 |
Рисунок 2.17. Статические характеристики объекта регулирования (а)
и системы регулирования (б).
величины – температуры воздуха в холодильной камере:
 ,
,
при некоторых постоянных температурах окружающего воздуха tв, и зависимость отвода теплоты  из холодильной камеры в функции QT.
из холодильной камеры в функции QT.
Если внешние условия изменятся, например, повысится температура наружного воздуха  , то это вызовет возрастание теплопритоков Qт и его превышение над теплоотводом Qо, в результате чего произойдет повышение температуры воздуха в камере. Повышение температуры tв будет замедлять рост теплопритока Qт до тех пор, пока теплоприток не сравняется с растущим теплоотводом при новом значении tв.
, то это вызовет возрастание теплопритоков Qт и его превышение над теплоотводом Qо, в результате чего произойдет повышение температуры воздуха в камере. Повышение температуры tв будет замедлять рост теплопритока Qт до тех пор, пока теплоприток не сравняется с растущим теплоотводом при новом значении tв.
Точки 1, 2 и 3 пересечения статических характеристик  и
и  (рис.2.17,а) соответствуют установившимся режимам работы при различных температурах наружного воздуха (10, 20 и 30 °С) и соответствующих им теплопритоках Qт1, Qт2 и Qт3 в случае, если холодильная машина будет работать при неизменной настройке задающих устройств.
(рис.2.17,а) соответствуют установившимся режимам работы при различных температурах наружного воздуха (10, 20 и 30 °С) и соответствующих им теплопритоках Qт1, Qт2 и Qт3 в случае, если холодильная машина будет работать при неизменной настройке задающих устройств.
По точкам 1, 2 и 3 можно построить статическую характеристику автоматической системы регулирования, т.е. зависимость регулируемой величины tв от нагрузки Qт – внешнего возмущающего воздействия (рис.2.17,б).
В системе автоматизации холодильной установки (холодильная камера – холодильная машина) объектом регулирования, как было отмечено выше, является холодильная камера, источником возмущения служат теплопритоки внутреннего и внешнего характера в результате воздействия которых происходит изменение регулируемой величины (температуры воздуха tв). Функциональная схема автоматизации приведена на рис.2.18.
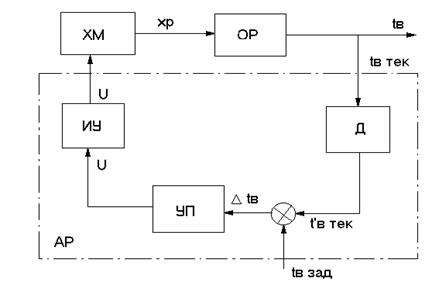 |
Рисунок 2.18. Функциональная схема автоматической системы регулирования
температуры в холодильной камере.
Принцип действия. По каналу обратной связи текущее значение регулируемой величины tв тек воздействует на регулятор. Информация о состоянии температуры воздуха в камере воспринимается датчиком температуры Д и в преобразованном виде tв¢ тек поступает на элемент сравнения ЭС, где сравнивается с заданным значением температуры tв зад. В элементе сравнения производится операция вычитания, в результате которой определяется показатель рассогласования  . Если регулируемая величина равна заданному значению, то сигнал рассогласования
. Если регулируемая величина равна заданному значению, то сигнал рассогласования  , и с выхода автоматического регулятора сигнал управления U=0. При наличии рассогласования регулятор формирует сигнал управления холодильной машиной, которая изменяет регулирующее воздействие
, и с выхода автоматического регулятора сигнал управления U=0. При наличии рассогласования регулятор формирует сигнал управления холодильной машиной, которая изменяет регулирующее воздействие  на объект регулирования с целью достижения равновесия
на объект регулирования с целью достижения равновесия  .
.
Так как теплоотвод из холодильной камеры осуществляется холодильной машиной ХМ и может быть обеспечен при условии ее эффективной работы, то практически автоматизация холодильной установки сводится к автоматизации входящей в нее холодильной машины.
Пояснение. Пределы колебания температуры в камере главным образом зависят от свойств регулятора температуры и свойств регулируемого объекта. Обычно в камерах, где хранятся мороженные продукты, допускается точность поддержания температуры ± 1°С. К ²нулевым² камерам, где хранятся яйца и фрукты предъявляются более жесткие требования, так как при отрицательной температуре резко ухудшается качество продуктов. В таких камерах температура должна поддерживаться с точностью ±0.5 °С.