Инструкция по работе с автопилотом на прикормочных кораблях FastRNBoat
Содержание:
Органы управления.
Показания на дисплее ПУ.
Режимы работы и функционал автопилота
Изменение скорости движения
1. Органы управления.

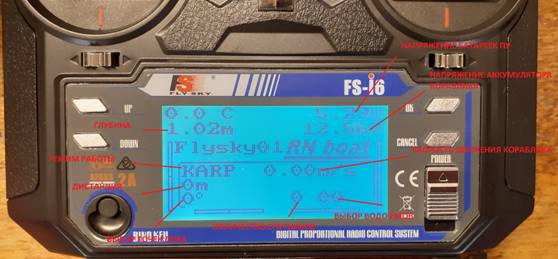
2. Показания на дисплее ПУ.
3. Режимы работы и функционал автопилота
Автопилот имеет 3 режима работы:
1-й-ручной режим (тумблерSWC в положении 1);
2-й- режим «автопилот, движение по точкам»(тумблер SWC в положении 2);
3-й- режим «автовозврат на нулевую точку» (тумблер SWC в положении 3).
Ручной режим(тумблерSWC в положении 1)
Работа в ручном режиме кораблика, оснащенным автопилотом, не чем не отличается от работы кораблика в базовой комплектации.
Движение по точкам (тумблерSWC в положении 2)
Данный режим работы доступен,если GPS-антенна автопилота поймала спутники. На скорость поиска спутников напрямую влияют погодные условия. Количество спутников влияет на работу в данном режиме,а так же на точность выполнения команд и на точность движения по точкам. Если количество спутников меньше4-х -автопилот работать не будет.От 4 до 10 – в работемогут наблюдаться сбои в выполнении команд, т.е.остановка кораблика во время выполнения миссии, низкая точность при подходе на точку.Количество спутников от 10 до 21 - гарантирует корректную работу всех систем и точное выполнение всех команд.
В режиме «Движение по точкам» (тумблер SWC в положениии 2) существуютдваалгоритма работы: полуавтоматический режим – «Fish» и автоматический режим – «BACK». Полуавтоматический режим «Fish» применяется при ловле в ограниченном пространстве, вблизи преград, коряг, стенки камыша, когда разворот кораблика необходимо выполнить в ручном режиме. В данном режиме кораблик отправляется на выбранную точку лова, выгружает кормушки, и ожидает дальнейших команд. Автоматический режим «BACK» применяется при ловле на открытой воде. В данном режиме кораблик отправляется на точку, по приходу выгружает кормушки и самостоятельно возвращается на нулевую точку.Для переключения этих режимов необходимо: правый и левый стиксвести вовнутрь, навстречу друг к другу на дисплее отобразится выбранный режим.
Данный автопилот может запомнить 7 водоёмов, на каждом водоёмепо девять рабочих точек и одна домашняя точка. Для выбора водоёмов необходимо правый и левый стикуправления развести в разные стороныи на дисплее будет отображается выбор места лова.
Выбор рабочих точек осуществляется движением правого стика вверх и вниз так же выбранная точка отображается на дисплее ПУ.
Порядок выполнения действий для движения по точкам:
1. Выберите нулевую точку и сохраните её прижав правый стик влево, прозвучит звуковой сигнал.
2. Переключите кораблик в ручной режим (тумблер SWC в положении 1). Отправьте кораблик в ручном режиме на первую точку лова.
3. Переключите кораблик в режим «движение по точкам»(тумблерSWC в положении 2).
Движение правого стикав верх выберите номер точки 1 и сохраните её, прижав стик влево. Аналогично двигаемся и сохраняем до девяти точек.
4. После того как сохранили точки лова,переводим тумблер SWC в положении 3, кораблик последует на нулевую точку.
5. Отправка на выбранную точку производится только из нулевой точки. Для отправки на точку выбираем правым стиком в верх или в низ номер сохранённой точки, далее опускаем клавиши бункеров (SWAи SWB), которые нам надо открыть, и прижимаем стик вправо.
3. Авто возврат на нулевую точку (тумблер SWC в положении 3 )
Данный режим работы доступен если GPS-антенна автопилота поймала спутники. Данная функция возвращает кораблик на нулевую точку из любой точки на водоёме.
4. Изменение скорости движения
Для изменения скорости необходимо выполнить следующие действия:
1. Переводим тумблер SWC в положении 2.
2. Прижимаем левый стик в верх и влево или в вниз и влево таким образом можно изменить скорость движения корабля в автоматическом режиме, далее опускаем клавишу SWDв низ и также настраиваем двойную скорость.
3. Прижимаем левый стик в верх и вправо или в вниз и вправо, таким образом изменяем скорость ручного режима работы.