Проанализированы возможности использования метода потенциалов для управления распределенной мобильной системой (РМС). Исследовано пять способов организации такого движения:
1. Движение по схеме «цепь». В этом случае сила притяжения цели действует на «лидера», и каждый МР «притягивается» к впереди идущему.
2. Движение типа «гонка за лидером». В этом случае все элементы РМС «притягиваются» к «лидеру», который, в свою очередь, «притягивается» к целевой точке.
3. Движение типа «расхождения». В этом случае на МР, расположенные компактной группой или цепью, начинает действовать сила отталкивания от «лидера». МР «разбегаются», исследуя каждый свой участок.
4. Движение типа «схождение». В этом случае «лидер» собирает все элементы РМС в компактную группу.
5. Организация движения типа «свободный поиск». В этом случае сила притяжения к цели отсутствует, и каждый элемент РМС движется в свободном от препятствий направлении.
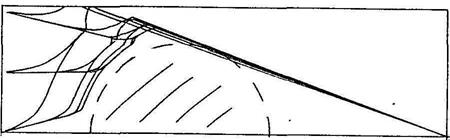
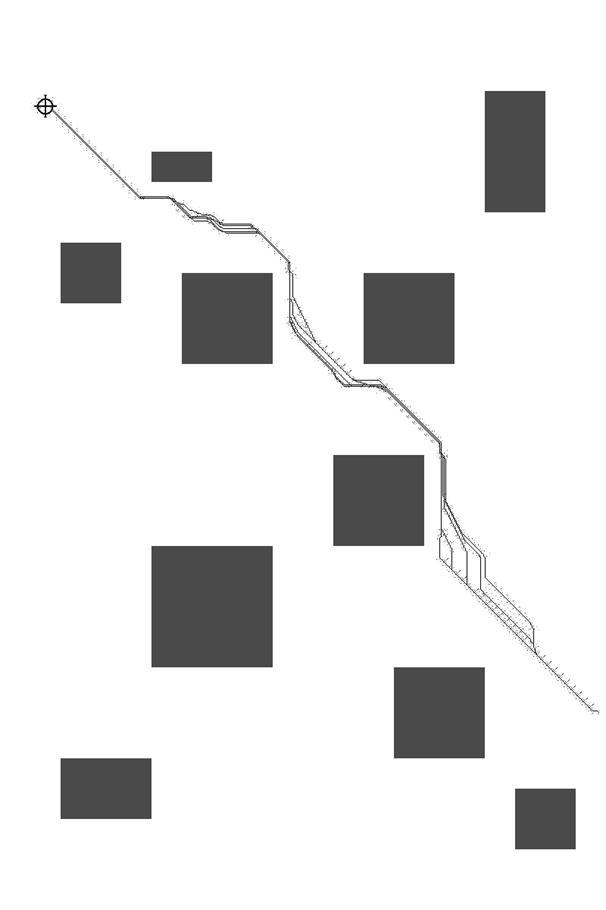
На рис. 8 приведен пример движения типа «гонка за лидером». Особо следует подчеркнуть, что при этом могут быть реализованы и негомотопные пути. При этом каждый робот рассматривает остальные элементы РМС как динамические препятствия, а робот-«лидер» осуществляет также и целевое притяжение.
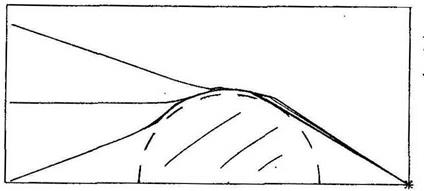
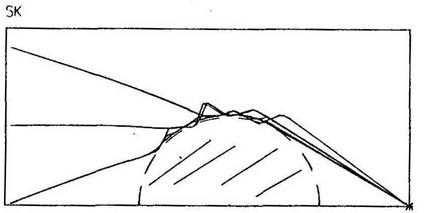
На рис. 9 приведен пример реализации движения типа «цепь». Особо следует отметить тот факт, что следующие за лидером роботы автоматически осуществляют определенное спрямление траектории. Пример реализации негомотопных путей в данном режиме движения авторам пока построить не удалось.
Заключение
На основе проведенных исследований получены следующие результаты:
1) В качестве функций отталкивания от препятствий более эффективно использовать экспоненциальные функции. При этом получаются более безопасные и более гладкие траектории, кроме того, отсутствует необходимость нормирования результирующей функции отталкивания от препятствий.
2) Силу притяжения к цели следует выбирать постоянной, поскольку переменная сила притяжения к цели ведет к усложнению алгоритмов вычисления функции отталкивания от препятствий, так как она также становится зависимой от расположения текущей точки и целевой.
3) Метод потенциалов без настройки в виде некоторых эвристик можно использовать, в основном, для случая выпуклых препятствий. В общем случае, при наличии точек устойчивого равновесия результирующих информационных «сил» для выхода из этих точек можно использовать эвристику, касающуюся смены направления движения на цель, или же датчик случайного притяжения вместо притяжения к целевой точке. В принципе, следует отметить, что существуют потенциальные функции, гарантирующие отсутствие локальных экстремумов, однако подобные функции требуют организации сложных вычислительных процессов.
4) Уравнение движения в поле информационных сил эффективней рассчитывать по первой производной, а не по второй, как это делается в теоретической механике,
5) Все перечисленные выше возможности реализованы в разработанной версии ППП, который позволяет организовывать совместное движение до 12 роботов в составе РМС.
На основе полученных результатов можно сделать следующие выводы:
1) Алгоритмы, основанные на методе потенциалов, могут эффективно использоваться в случае, если контуры препятствий аппроксимированы выпуклыми многоугольниками или окружностями. Для более сложных сред требуется проведение дальнейших исследований.
2) Алгоритмы, основанные на методе потенциалов, могут использоваться для управления РМС как в режиме передвижения, так и в режиме исследования местности.
3) При планировании перемещения робота системе управления часто требуется не вся возможная трасса движения, а текущее направление движения МР. Метод потенциалов позволяет достаточно просто вычислять это направление. Особо следует подчеркнуть, что метод потенциалов позволяет использовать для этой цели «размытую» приближенную информацию о препятствиях.
4) Для уменьшения колебаний движущейся точки при обходе контура препятствия имеет смысл брать сектор обзора, превышающий 180 градусов.
БЛАГОДАРНОСТИ
Авторы выражают глубокую признательность за поддержку исследований и полезные замечания В.С. Зарубину, С.Б. Ткачеву и И.Р. Белоусову.
Литература
1. Платонов А.К., Карпов И.И., Кирильченко А.А. Метод потенциалов в задаче прокладки трассы // М.: Препринт Ин-та прикладной математики АН СССР, 1974, # 124, 27 с.
2. Wang Y., Lane D.N., Falconet G.S. Two novel approaches for unmanned underwater vehicle path planning: constrained optimization and semi-infinite constrained optimization. "Robotica", 2000, v.18, pp 123-142.
3. Левин К. Топология и теория поля. // "Хрестоматия по истории психологии", М.: Издательство МГУ, 1980, с.122-131.
4. Rimon E., Koditschek D.E. The construction of analytic diffeomorphisms for star worlds. // "IEEE Int. Conf. Rob. and Autom., 1989: Proc. vol.1", - Waschington etc., 1989, pp. 21-26.
5. Koditschek D.E. Task encoding: toward a scientific paradigm for robot planning and control // "Robotics and Automation systems", 1992, v.9, # 1-2, pp. 5-39.
6. Khatib O. Real-time obstacle avoidance for manipulators and mobile robots// “IEEE Int. Conf. Robotics and Automation”, 1985, pp. 500-505.
7. Brooks R.A. Self calibration of motion and stereo vision for mobile robots // “IEEE Int. Robotics and Automation”, 1986, 2:14.
8. Фиск К., Кэски Д., Уэст Л. Автоматическое проектирование печатных плат // ТИЭЭР, 1967, # 11, т. 55, стр. 217-228.
9. Ichikawa Y., Fujie M., Ozaki N. On mobility and autonomous properties of mobile robots // Robot, 1984, # 44, pp. 31-36.
10. Adams M.D., Hu Huosheng, Probert P.J. Towards a real-time architecture for obstacle avoidance and path palnning in mobile robots // “IEEE Int. Conf. Robotics and Automation”, 1990, pp. 584-589.
11. Hauge T., Brady M., Cameron S. Using moments to plan paths for the Oxford AGV // “IEEE Int. Conf. Robotics and Automation”, 1990, pp. 210-215.
12. Borenstein J., Koren Y.,Real-time Obstacle Avoidance for Fast Mobile Robots In Cluttered Enviroments // “IEEE Int. Conf. Robotics and Automation”, 1990, pp. 572-577.
13. Louste C., Liegeois A. Near optimal robust path planning for mobile robots: the viscous fluid method with friction // “Journal of Intelligent and Robotic Systems”, 2000, # 27, pp. 99-112.
14. Arkin R.C. Motor schema – based mobile robot navigation // “IEEE Int. Conf. Robotics and Automation”, 1987 pp. 92 – 112.
15. Takahashi O., Schilling R.J. Motor planning in a plane using generalized Voronoi diagram // “IEEE Transactions on Robotic and Automation”, 1989, pp. 143 – 150
Иллюстрации
STEP

(a)
KOEF
(b)
(c)
(d)
Рис.1
Рис. 2
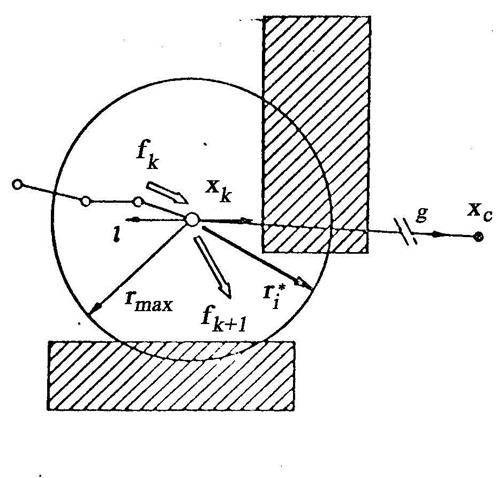
Рис. 3
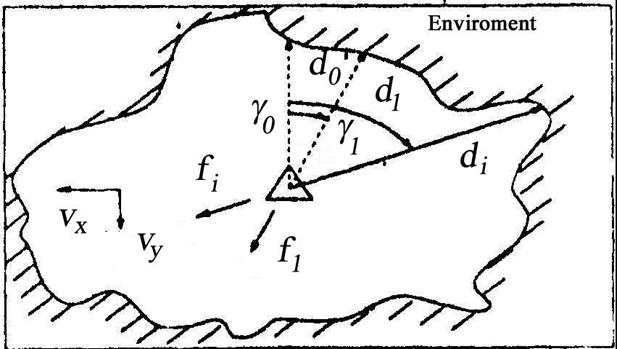
Рис. 4

Рис. 5

| Рис. 6а 6а |
| Рис. 6б 6б |
| Рис. 7а |

| Рис. 7б |
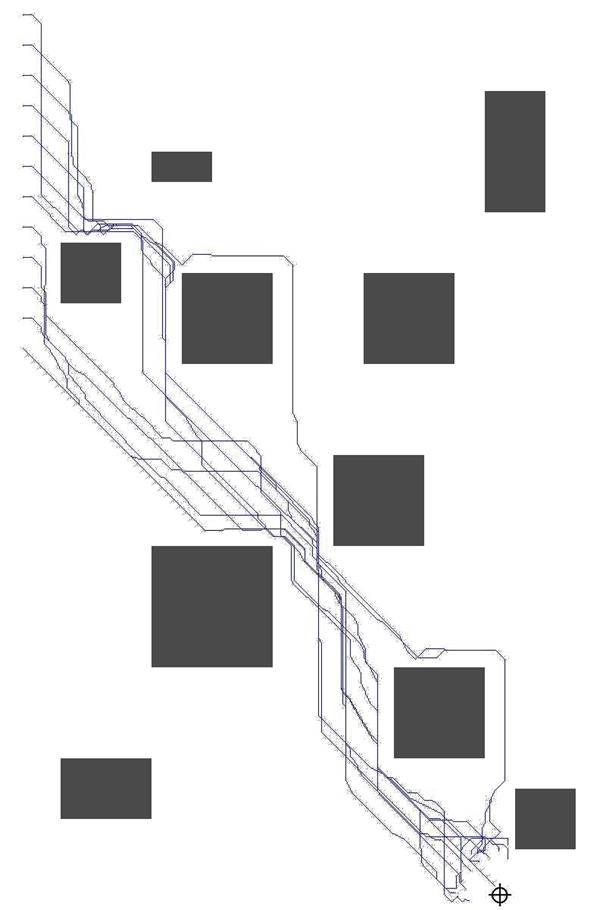
| Рис. 8 |
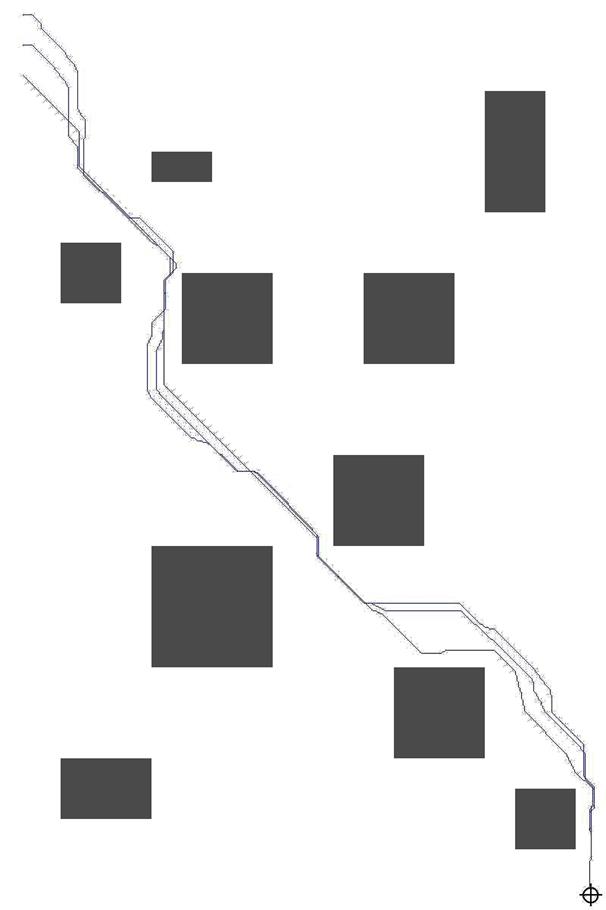
| Рис. 9 |