Для повышения стабильности момента и угловой скорости в пределах оборота применяют специальные схемы модуляции тока в обмотках статора.
В настоящее время крупными сериями выпускаются только бесконтактные микродвигатели. Однако наблюдается тенденция роста выпуска бесконтактных двигателей малой мощности, которые могут составить конкуренцию высокомоментным двигателям, используемым в промышленных роботах, приводах подач обрабатывающих центров и т.д. Объясняется это, в частности, тем что сами бесконтактные двигатели имеют меньшие габариты и массу, чем коллекторные, так как у них лучше условия охлаждения – источники тепла только на статоре, и отсутствует такой источник нагрева, как узел трения коллектор–щетки. Правда, бесконтактный двигатель не может работать без полупроводникового коммутатора.
В ряде случаев двигатели постоянного тока целесообразно делать линейными.
На рис.5, а показана схема электромагнитной системы линейного бесконтактного двигателя. Корпус индуктора 1 выполнен из ферромагнитного материала и служит внешним магнитопроводом. В корпусе расположены постоянные магниты 2, создающие поток возбуждения Фв, индуктор является подвижной частью линейного двигателя. Якорь 3 представляет собой диэлектрическую пластину, на поверхности которой методом фотолитографии выполнена печатная схема проводников 4. Якорь является неподвижной частью двигателя. Длина якоря lя больше длины индуктора lи на длину хода индуктора. Проводники якоря объединены в катушки, оси которых сдвинуты по длине якоря. Выводы катушек подсоединены к полупроводниковому коммутатору. На рис. 5, б показана схема кинематического звена поступательного перемещения с линейным двигателем. Якорь 3 прикреплен к неподвижной направляющей 5, а индуктор 1 – к подвижной каретке 6. На направляющей по осям катушек якоря расположены сигнальные элементы, вызывающие срабатывание датчиков положения индуктора относительно якоря, расположенных на каретке.
Работа линейного бесконтактного двигателя мало отличается от работы рассмотренного ранее вращающегося бесконтактного двигателя. Различие состоит в том, что силы электромагнитного взаимодействия тока якоря с полем возбуждения индуктора создают тяговое электромагнитное усилие Fтяг в плоскости якоря, которое приводит к поступательному перемещению индуктора.
Заключение
Бесконтактные электродвигатели постоянного тока типа БК-1, БК-2, ДБ предназначены для применения в составе научной и служебной аппаратуры космических аппаратов, других технических средств с высокой надежностью и длительным сроком службы без регламентного обслуживания. Основными узлами двигателей являются ротор с постоянными магнитами, статор с обмотками и датчиками положения ротора на эффекте Холла, полупроводниковый коммутатор (встроенный для двигателей БК-1 и БК-2, либо выполненный в виде отдельного конструктива для двигателей типа ДБ). Ротор двигателей БК-2 и ДБ отделен от статора герметичной гильзой, что обеспечивает надежную изоляцию внутренней полости двигателей с вращающимся ротором от окружающей среды, дает возможность простыми средствами встроить электродвигатель, например в насос гидросистемы, не заботясь об установке на вал двигателя каких-либо уплотнителей.
Бесконтактные электродвигатели типа БК-1, БК-2, ДБ различных модификаций успешно применяются в приводах вентиляторов и насосов систем жизнеобеспечения и терморегулирования космических аппаратов, пилотируемых кораблей, скафандров космонавтов. Они используются для перекачки горячей щелочи в насосах электрохимических источников тока, обеспечивают функционирование компрессоров микрокриогенных установок, ряда приборов и систем, в том числе автоматизированных технологических комплексов.
Список использованной литературы
1. Учебное пособие «Электромеханические устройства автоматики». М. – 2002.
2. Стома С.А., Ремизов В.Е., Кузьмин В.Н., Медушев С.В., Михайлов Е.М., Тихомиров В.К. Изделия точной электромеханики для космических аппаратов (опыт создания и эксплуатации). М.: МЭИ. 1999.
Приложения
бесконтактный двигатель ток аппаратура
Рисунок 1.

Рисунок 2.
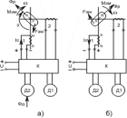
Рисунок 3.

Рисунок 4.

Рисунок 5.
