ЛабораторныЕ РАБОТЫ
По курсу
„Теоретические основы
автоматического управления“
В среде MATLAB
Саранск
Издательство мордовского университета
УДК 681.5
Составители: А. Ю. Бальзамов, В. В. Никулин, Г. М. Тутаев
Лабораторные работы по курсу „Теоретические основы автоматического управления” в среде MATLAB / Сост.: А. Ю. Бальзамов, В. В. Никулин, Г. М. Тутаев. — Саранск: Изд-во Мордов. ун-та, 2003. — 20 с.
Содержится описание лабораторных работ по курсу „Теоретические основы автоматического управления”, выполняемых с использованием пакета расширения системы MATLAB 6.0 – SIMULINK 4.0.
Предназначен для студентов специальностей „Промышленная электроника”, „Автоматизированные системы обработки информации и управления”.
Печатается по решению научно-методического совета Мордовского государственного университета имени Н. П. Огарева.
Учебное издание
Лабораторные работы по курсу
„Теоретические основы автоматического управления”
В СРЕДЕ MATLAB
Составители: БАЛЬЗАМОВ Александр Юрьевич
НИКУЛИН Владимир Валерьевич
ТУТАЕВ Геннадий Михайлович
Печатается в соответствии с представленным оригинал-макетом
Подписано в печать ______. Формат 60 х 84 1/16. Бумага газетная. Печать офсетная. Гарнитура Таймс. Усл. печ. л. __. Уч.-изд. л. __. Тираж 200 экз. Заказ № ___.
Издательство Мордовского университета
Типография Издательства Мордовского университета
430000, Саранск, ул. Советская, 24
Лабораторная работа № 1
Структурные модели динамических процессов
Цель работы: изучение методов построения структурных моделей динамических процессов и знакомство со средой визуального имитационного моделирования SIMULINK 4.0.
Прикладные методы исследования систем автоматического управления базируются, как правило, на использовании структурных моделей протекающих в них динамических процессов. Структурная схема представляет собой графическое изображение математической модели системы в виде соединений звеньев и дает наглядное представление о связях между звеньями, прохождении и преобразовании сигналов в системе. На построении структурных схем основан метод имитационного моделирования динамических процессов в системах автоматического управления.
Достоинствами имитационного моделирования в среде Simulink являются простота и наглядность. От пользователя не требуется знания каких-либо языков программирования.
Рассмотрим подробнее построение структурных моделей на примере активного колебательного RLC-контура (рис. 1.1). Ниже приводится полное уравнение, описывающее электрические процессы в этом контуре.
 (1.1)
(1.1)

Рис. 1.1. Активный колебательный контур
На рис. 1.2 показан контур как единое колебательное звено.
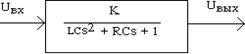 Рис. 1.2. Структурная схема колебательного звена
Рис. 1.2. Структурная схема колебательного звена
|
При необходимости исследования процессов в элементах данного контура, а также с целью разложения преобразования сигналов в контуре на простейшие вычислительные операции (суммирование, умножение, интегрирование) структурную схему следует изобразить более подробно (рис. 1.3).

Рис. 1.3. Структурная модель колебательного звена
В данной модели разность напряжений Uвх и на конденсаторе Uс определяет суммарное напряжение на индуктивности и сопротивлении UL+UR (сумматор 1). Если из суммарного напряжения вычесть величину напряжения на сопротивлении UR, то останется напряжение на индуктивности UL (сумматор 2). Путем интегрирования по времени напряжения на индуктивности получим потокосцепление y (интегратор 3), а делением последнего на величину индуктивности – ток i (усилитель 4). Обычно используется форма двух последних преобразований:  .
.
Ток i создает падение напряжения на сопротивлении UR=iR (усилитель 5). Интегрирование тока по времени позволяет рассчитать заряд конденсатора q (интегратор 6), а деление заряда на величину емкости — напряжение на конденсаторе UC (усилитель 7). Последние два преобразования записываются в такой форме:  .
.
Путем умножения напряжения на конденсаторе на коэффициент усиления К найдем выходное напряжение Uвых (усилитель 8).
Аналогичную структурную модель колебательного контура можно вычислить, не рассматривая математическое описание отдельных элементов, а используя полное уравнение контура (1.1). Для этого в уравнении нужно выделить старшую производную выходной величины:
 (1.2)
(1.2)
В соответствии с полученным уравнением построим структурную схему, начиная с величины  (рис. 1.4). Дважды проинтегрировав эту величину, рассчитаем
(рис. 1.4). Дважды проинтегрировав эту величину, рассчитаем  и U вых (интеграторы 5 и 6). Путем умножения U вх на К (усилитель 1) и вычитания U вых (сумматор 2), а затем с помощью умножения результирующего сигнала на
и U вых (интеграторы 5 и 6). Путем умножения U вх на К (усилитель 1) и вычитания U вых (сумматор 2), а затем с помощью умножения результирующего сигнала на  (усилитель 3) найдем
(усилитель 3) найдем  . Вычтя из данной величины сформированный с помощью усилителя 7 сигнал
. Вычтя из данной величины сформированный с помощью усилителя 7 сигнал  (сумматор 4), согласно уравнению (1.2) получим величину
(сумматор 4), согласно уравнению (1.2) получим величину  .
.
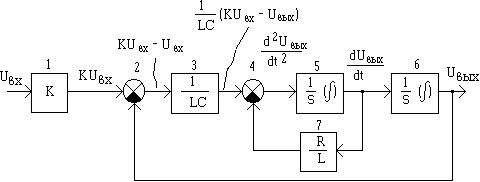
Рис. 1.4. Преобразованная структурная модель колебательного звена
Используя правила преобразования структурных схем, можно доказать эквивалентность моделей, показанных на рис. 1.3 и 1.4. В них применяются лишь различные внутренние переменные. Важно отметить, что все подобные структурные модели строятся на базе интеграторов, масштабных усилителей и сумматоров. При этом возможно аналоговое (с помощью аналоговых вычислительных машин) и цифровое моделирование.
Разработка моделей средствами Simulink (в дальнейшем S-моделей) основана на использовании технологии Drag-and-Drop. В качестве элементов для построения S-модели используются модули (или блоки), хранящиеся в библиотеке Simulink.
Блоки, включаемые в создаваемую модель, могут быть связаны друг с другом как по информации, так и по управлению. Тип связи зависит от типа блока и логики работы модели. Данные, которыми обменивются блоки, могут быть скалярными величинами, векторами или матрицами произвольной размерности.
Любая S-модель может иметь иерархическую структуру, то есть состоять из моделей более низкого уровня, причем число уровней иерархии практически не ограничено. Это делает модель более наглядной и упрощает анализ работы и отладку системы в целом.
Наряду с другими параметрами моделирования пользователь может задавать способ изменения модельного времени (с постоянным или переменным шагом), а также условия окончания моделирования.
В ходе моделирования имеется возможность наблюдать за процессами, происходящими в системе. Для этого используются специальные «смотровые окна», входящие в состав библиотеки Simulink. Интересующие пользователя характеристики системы могут быть представлены как в числовой, так и в графической форме. Кроме того, существует возможность включения в состав модели средств анимации.
Еще одно важное достоинство Simulink заключается в том, что он является открытой системой: состав библиотеки может быть пополнен пользователем за счет разработки собственных блоков.
Запуск Simulink
Сначала необходимо запустить MATLAB любым способом, предусмотренном в Windows (например, через Пуск/ Программы/ MATLAB/ MATLAB R12). После запуска появляется основное окно системы MATLAB. В панели инструментов нажать кнопку Simulink  . В результате открывается окно интегрированного браузера библиотек Simulink, показанное на рис 1.5.
. В результате открывается окно интегрированного браузера библиотек Simulink, показанное на рис 1.5.

Рис. 1.5. Окно браузера библиотек Simulink
В окне браузера библиотек содержится дерево компонентов библиотек Simulink. Для просмотра раздела библиотеки нужно выделить его мышью – в правой части окна появится набор пиктогармм компонентов активного раздела библиотеки.
С помощью меню браузера или кнопок  и
и  его панели инструментов можно открыть окно для создания новой панели или открыть существующую.
его панели инструментов можно открыть окно для создания новой панели или открыть существующую.
Задание
1. Запустить браузер Simulink. Нажать кнопку «Создать» панели инструментов. Открыть библиотеку источников входных воздействий Sources  . Перетащить мышью в окно новой модели источники синусоидального
. Перетащить мышью в окно новой модели источники синусоидального  и единичного ступенчатого
и единичного ступенчатого  сигналов. Из раздела библиотеки Sinks
сигналов. Из раздела библиотеки Sinks  извлечь осциллоскоп
извлечь осциллоскоп  . Для одновременного наблюдения нескольких сигналов на одном осциллоскопе необходим мультиплексор
. Для одновременного наблюдения нескольких сигналов на одном осциллоскопе необходим мультиплексор  , находящийся в разделе библиотеки Signals & Systems
, находящийся в разделе библиотеки Signals & Systems  .
.
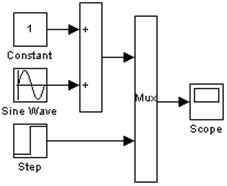
Собрать схему, как показано на рис 1.6 а., соединяя мышью входы и выходы элементов, при необходимости изменяя их размеры при помощи «ручек», появляющихся на углах элемента при его выделении.
  а) б)
Рис. 1.6. Схема исследования генераторов сигналов
а) б)
Рис. 1.6. Схема исследования генераторов сигналов
|
Для настройки параметров элемента схемы дважды щелкнуть его мышью и в открывшемся окне произвести необходимые изменения.
Запустить моделирование, нажав кнопку  панели инструментов. Для просмотра результатов открыть окно осциллоскопа двойным щелчком.
панели инструментов. Для просмотра результатов открыть окно осциллоскопа двойным щелчком.
2. Ввести в синусоидальный сигнал постоянную составляющую, используя источник постоянного сигнала Constant из библиотеки Sources и сумматор Sum из библиотеки Math, как показано на рис. 1.6 б. Запустить моделирование и посмотреть результат в окне осциллоскопа.
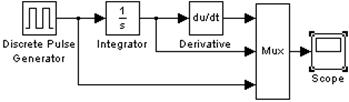 Рис. 1.7. Модели для исследования работы элементов библиотеки Simulink
Рис. 1.7. Модели для исследования работы элементов библиотеки Simulink
|
3. Для исследования интегрирования и дифференцирования собрать схему, показанную на рис. 1.7, используя элементы Discrete Pulse Generator из библиотеки Cources, Derivative и Integrator из библиотеки Continuous. Объяснить полученный результат.
4. Изменить время моделирования и точность интегрирования. Выполнить пункт 3 с новыми параметрами. Установка параметров моделирования выполняется командой Simulation Parameters в меню Simulation окна Simulink. При этом открывается окно установки параметров моделирования. Это окно имеет ряд вкладок с довольно большим числом параметров. Рассмотрим вкладку, открытую по умолчанию – Solver (Решатель). Эта вкладка позволяет установить параметры решающего устройства системы моделирования Simulink.
К числу важнейших параметров решателя относится время моделирования – Simulation time. Оно задается начальным временем Start time (обычно 0) и конечным временем Stop time (по умолчанию 10 с). Равенство Stop time бесконечности (inf) означает, что моделирование будет происходить бесконечно долго, пока не прервать его. Однако в этом случае трудно получить различимые осциллограммы работы устройства, поэтому рекомендуется задавать конечные значения Stop time.
Время моделирования – величина условная. Точного соответствия между временем моделирования в секундах и заданным значением нет. Реальное время моделирования сильно зависит от быстродействия компьютера, на котором выполняется моделирование.
Первостепенное значение имеют две опции решателя в поле Solver options: тип решения и метод решения. Возможны два типа решения:
– Variable-step solvers – решение с переменным шагом;
– Fixed-step solvers – решение с фиксированным шагом.
Как правило, лучшие результаты дает решение с переменным шагом (обычно по времени, но не всегда). В этом случае шаг автоматически уменьшается, если скорость изменения результатов в процессе решения возрастает. И напротив, если результаты меняются слабо, шаг решения автоматически увеличивается. Это исключает (опять-таки, как правило) расхождение решения, которое нередко случается при фиксированном шаге.
Метод с фиксированным шагом стоит применять только тогда, когда фиксированный шаг обусловлен спецификой решения задачи, например, если ее цель заключается в получении таблицы результатов с фиксированным шагом. Этот метод дает неплохие результаты, если поведение системы описывается почти монотонными функциями. Вторая из указанных опций – выбор метода моделирования. Для решения дифференциальных уравнений можно выбрать следующие методы: discrete (дискретный), ode45, ode23 (три варианта, включая метод Розенброка), rk45 (метод Дорманда-Принса), ode113 (метод Адамса) и ode15s. Методы, в наименовании которых имеется слово stiff, служат для решения жестких систем дифференциальных уравнений.
Следующие три параметра обычно задаются автоматически (значения опции Auto):
– Max step sise – максимальный шаг интегрирования системы однородных дифференциальных уравнений;
– Min step sise – минимальный шаг интегрирования;
– Initial step sise – начальный шаг интегрирования.
Важным параметром является и точность интегрирования:
– Relative tolerance – относительная погрешность интегрирования;
– Absolute tolerance – абсолютная погрешность интегрирования.
По умолчанию они имеют значения 10-3 и 10-6 соответственно. Уменьшение погрешности приводит к увеличению времени вычисления; увеличение погрешности может привести к фрагментированию графиков результатов моделирования.
Контрольные вопросы
1. Что называется структурной схемой и каковы достоинства структурных моделей, используемых при исследовании систем автоматического управления?
2. Какие свойства колебательного контура отражают внутренние обратные связи в его структурной модели?
3. Сформулировать основные правила преобразования структурных схем.
4. В чем заключаются преимущества и недостатки аналогового моделирования по сравнению с цифровым?
Лабораторная работа № 2
Исследование переходных характеристик
колебательного звена
Цель работы: получение и анализ переходных характеристик колебательного звена при различных значениях его параметров.
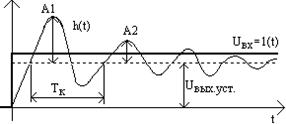 Рис. 2.1. Переходная характеристика колебательного звена
Рис. 2.1. Переходная характеристика колебательного звена
|
Переходной характеристикой h (t) называют реакцию какой-либо системы на единичное ступенчатое воздействие (рис. 2.1).
В данной работе объектом исследований является колебательное звено. В стандартной форме записи переходные процессы в нем описываются дифференциальным уравнением второго порядка:
 , где К — коэффициент усиления; Т — постоянная времени; x — степень затухания, 0 < x < 1.
, где К — коэффициент усиления; Т — постоянная времени; x — степень затухания, 0 < x < 1.
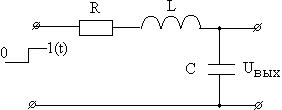 Рис. 2.2. Схема колебательного контура
Рис. 2.2. Схема колебательного контура
|
Передаточная функция определяется выражением
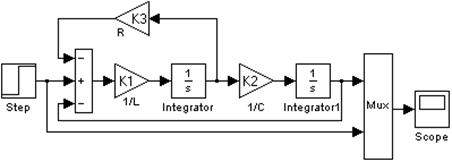 Рис. 2.3. Структурная модель колебательного звена
Рис. 2.3. Структурная модель колебательного звена
|
 . Если в качестве примера данного звена рассмотреть активную RLC -цепь (рис. 2.2), то структурная модель будет иметь вид, показанный на рис. 2.3.
. Если в качестве примера данного звена рассмотреть активную RLC -цепь (рис. 2.2), то структурная модель будет иметь вид, показанный на рис. 2.3.
На рис. 2.3 K 1=1/ L; K 2=1/ C; K 3= R. Модель строится на двух последовательно соединенных блоках-интеграторах, охваченных общей отрицательной обратной связью с коэффициентом, равным 1.
Исследование модели необходимо провести для трех значений коэффициента К 3.
Результаты измерений занести в табл. 2.1.
Таблица 2.1
| Переходная характеристика | U вх | U вых.уст | А 1 | А 2 | ТК | К | w | a | w0 | Т | x |
| Rmin | |||||||||||
| R | |||||||||||
| Rmax |
Здесь U вх – величина ступеньки входного сигнала, U вых.уст установившееся значение выходного сигнала, А 1 и А 2 – амплитуды первого и второго колебаний, Т К – период колебаний, измеряемые непосредственно по переходной характеристике (см. рис. 2.1.). Rmin, R, Rmax, – значения величины активного сопротивления колебательного контура R (в порядке возрастания значений).
Параметры колебательного звена вычисляют по следующим формулам:  – коэффициент усиления;
– коэффициент усиления;  – частота собственных колебаний;
– частота собственных колебаний;  – коэффициент затухания;
– коэффициент затухания;  –резонансная частота;
–резонансная частота;  – постоянная времени колебательного звена;
– постоянная времени колебательного звена;  – степень затухания.
– степень затухания.
Задание
1. В соответствии с вариантом исходных данных R, L, C и К из табл. 2.2 нужно рассчитать коэффициенты структурной модели и преобразовать эту модель в схему Simulink.
Таблица 2.2
| Вариант | ||||||||||
| L, Гн | 0,1 | 0,01 | 0,1 | 0,1 | 0,01 | |||||
| С, мкФ | ||||||||||
| R, Ом | 1,5 |
2. Получить переходные характеристики для трех значений сопротивления R (К 3) и заполнить таблицу, рассчитав необходимые данные по формулам. Значения Rmin рекомендуется взять в 2 ÷ 3 раза меньше, чем R, а Rmax – в 2 ÷ 3 раза больше. При исследовании U вх, 1/ L (K 1) и 1/ C (K 2) должны оставаться неизменными.
3. Зарисовать переходные характеристики для трех значений сопротивления.
4. Исследовать изменения переходной характеристики при изменениях L и C и сделать выводы.
Отчет должен содержать рисунок исходной структурной модели, схемы Simulink, таблицу, расчетные формулы и графики переходных характеристик, а также выводы о проведенных исследованиях.
Контрольные вопросы
1. Что называется переходной характеристикой?
2. Что называется импульсной переходной характеристикой?
3 Что такое «единичное ступенчатое воздействие»?
4. Объясните изменение переходной характеристики при изменении R.
5. Каковы различия между w и w0?
Лабораторная работа № 3
Исследование частотных характеристик
колебательного звена
Цель работы: получение АЧХ и ФЧХ колебательного звена для различных параметров.
Исследуем частотные характеристики по фигуре Лиссажу. Структурная модель, описывающая процессы в колебательном звене, та же, что и в работе № 2 (см. рис. 2.3). Схема получения частотных характеристик показана на рис. 3.1.
Рис. 3.1. Схема получения частотных характеристик
Синусоидальный входной сигнал подают на вход модели и через коммутатор – на Х -вход XY Graph. На Y -вход через соответствующий вход коммутатора подают выходной сигнал. В первом такте на экран выводится горизонтальная измерительная линейка, во втором – отрезок Y = X, в третьем – ось ординат, в четвертом – эллипс. При снижении частоты входного сигнала с блока Sine Wave возможно неполное прорисовывание отрезков. Для устранения этого необходимо увеличить значение параметра Step time блоков Step1 ÷ Step3. Перемещение по вертикали измерительной линейки, осуществляется изменением значения Constant1. Таким образом находят D = D', В и b (см. рис. 3.1). Величину входного сигнала Х = D sin(wt) определяют совмещением измерительной линейки с верхней точкой отрезка Y = X, так как 0 D = 0 D '. Амплитуду выходного сигнала Y = B sin(wt+j) получают совмещением измерительной линейки с верхней точкой эллипса.
По найденным значениям рассчитывают величину коэффициента передачи A (w) и сдвиг фаз между выходным и входным сигналами j(w): A (w)= B / D;

|
— для эллипса, расположенного в 1-м и 4-м квадрантах;
— для эллипса, расположенного во 2-м и 3-м квадрантах.
В окне параметров блока Sine Wave задается круговая частота входного сигнала w =2pf (рад/сек).
Частоту входного сигнала рекомендуется изменять по логарифмическому закону. Например: w=20, 50, 100, 200, 500, 1000, 2000, 5000. Отдельно следует снять точку, соответствующую резонансу, когда эллипс располагается вдоль вертикальной оси (при переходе из 1-го – 3-го квадрантов во 2-й – 4-й).
Результаты измерений нужно занести в табл. 3.1.
Таблица 3.1
| Частотная характеристика | t | w | D | B | b | A(w) | b/B | arcsin b/B | j(w) |
| Rmin | |||||||||
| R | |||||||||
| Rmax | |||||||||
Задание
1. Снять частотные характеристики для Rmin, R, Rmax. Варианты исходных данных взять из лабораторной работы № 2.
2. Построить графики АЧХ и ФЧХ.
3. Рассчитать коэффициенты передаточной функции колебательного звена при различных значениях R и сравнить их с полученными в работе № 2.
4. Сделать выводы из полученных результатов.
Контрольные вопросы
1. Объяснить физические процессы в контуре при резонансе.
2. Что называется добротностью контура?
3. Как изменится резонансная частота с изменением L и C?
4. Как изменяется амплитуда выброса АЧХ при изменении активного сопротивления R?
Лабораторная работа № 4