Часть 2: Руководство пользователя VEXnet
https://vex.examen-technolab.ru/lessons/appendices/121/
1. Микроконтроллер Cortex и джойстик VEXnet - процедура сопряжения:
· Перед началом совместного использования джойстика и микроконтроллера Cortex с помощью ключей VExnet, необходимо произвести их сопряжение. Для сопряжения необходим кабель USB A-A и батарея VEX 7,2 В. Данный процесс необходимо повторять каждый раз для сопряжения джойстика и микроконтроллера Cortex. Джойстик может работать только с тем микроконтроллером, с которым он сопряжен. В процессе сопряжения, ID микроконтроллера передается джойстику, за счет чего создается пара.

· Микроконтроллер и джойстик в состоянии «Выкл.» (OFF).
· Присоединить джойстик к микроконтроллеру с помощью кабеля USB A-A.
· Присоединить к микроконтроллеру батарею 7,2 В.
· Включить питание микроконтроллера.
· Успешное сопряжение определяется по зеленому индикатору VEXnet, горящему непрерывно как на микроконтроллере, так и на джойстике (см. рисунок ниже).
1. 1. Зеленый индикатор VEXnet должен гореть непрерывно на обоих модулях не менее пяти секунд.
2. Остальные горящие индикаторы можно пока оставить без внимания.
3. Сопряжение может занять около минуты.


· Как только сопряжение выполнено, необходимо отключить микроконтроллер.
· Отсоединить кабель USB A-A от обоих модулей.
· Присоединить от микроконтроллера батарею 7,2 В.
Базовые соединения; батареи, микроконтроллер, джойстики ключи VEXnet (2).

· Присоединить батарею 7,2 В и ключ VEXnet к микроконтроллеру, как показано выше.
· Установить шесть идентичных батарей, как изображено. Разрешается использовать щелочные, никель-кадмиевые, никель-магниевые батареи, но НЕ РАЗРЕШАЕТСЯ сочетать батареи различных типов. Заряжать перезаряжаемые батареи разрешается только с помощью зарядных устройств, предназначенных для использования с батареями данного типа.

· Повторно установить крышку отделения для батарей (для этого, сначала установить два ушка крышки в тыльную стенку крышки), затем затянуть винт крышки. Подключить ключ VEXnet, как показано.

· Допускается также подключение джойстика напрямую к стандартной электрической розетке с помощью адаптера питания для джойстика (276-1710). Для этого необходимо просто установить этот кабель в порт PROGRAM/FACTORY джойстика, после чего джойстик может работать без батарей. Примечание: при использовании адаптера питания джойстика необходимо переключить джойстик в состояние «Вкл.» (ON). Индикатор JOYSTICK/POWER можно игнорировать.

· Включить микроконтроллер и джойстик, установив переключатели питания в положение «Вкл.» (ON), как показано на двух рисунках ниже.


· Правильно выполненное соединение показано ниже. Индикатор VEXnet на джойстике и на микроконтроллере начнет быстро мигать зеленым. Индикатор VEXnet - единственный индикатор, который обозначает правильное соединение. Процесс установления соединения обычно занимает 5-10 минут. Сразу после выполнения соединения, индикаторы джойстика и робота покажут уровни заряда батареи соответствующего модуля. Зеленый индикатор робота и джойстика обозначает полный заряд батареи. По мере уменьшения уровня заряда батареи цвет индикаторов изменится на желтый и, затем, красный.

· Если в течение 30 секунд не удалось установить соединение VEXnet, необходимо выключить и повторно включить оба модуля. Если соединение все еще не может быть установлено, см. блок-схему устранения неисправностей (раздел 7.
Базовая конфигурация
Ниже представлены некоторые примеры кода по умолчанию, загруженного в микроконтроллер Cortex при изготовлении. Для получения подробной информации относительно кода по умолчанию, см. раздел 4. Необходимо обратить внимание на следующее: Код по умолчанию для микроконтроллера Cortex может отличаться от кода по умолчанию микроконтроллера PIC. Для обеспечения надлежащего поведения робота необходимо использовать данные таблиц, представленных в настоящем документе.
· Добавить электромоторы и провести испытания. На рисунке ниже изображены два 3-проводных электромотора VEX, подключенных к моторным портам 2 и 5. С помощью кода по умолчанию, нажатием канала 3 джойстика вверх реализуется выполнение электромотором 2 поворота по часовой стрелке. Нажатием канала 2 джойстика вверх реализуется выполнение электромотором 5 поворота против часовой стрелке.

· Изменение направления вращения электромотора на обратное: Использование кода по умолчанию позволяет выполнять установку перемычек или переключателей в цифровые порты, чтобы изменить направление вращения электромотора на обратное. Эта техника очень полезна для корректировки направления вращения электромоторов без изменения кода, а также при использовании переключателя для изменения направления вращения электромотора на обратное в случае столкновения робота с объектом. На рисунке ниже изображены перемычки изменения направления, установленные в цифровые порты 2 и 5 с целью изменения направления для моторных портов 2 и 5. При использовании 2-проводных электромоторов, еще одним способом изменения направления их вращения на обратное является реверсивное соединение электромотора в точке его подключения к модулю моторного контроллера 29 или моторным портам микроконтроллера Cortex 1 и 10.

· Работа с двумя джойстиками: Допускается подключение второго джойстика, с помощью которого управление одним роботом смогут выполнять два оператора. Для этого необходимо просто присоединить второй джойстик VEXnet или сопряженный джойстик к основному джойстику VEXnet с помощью спирального телефонного кабеля, подключив его через порты сопряжения джойстиков. Ключ VEXnet должен быть установлен только на основном джойстике. При использовании кода по умолчанию, для активации работы с двумя джойстиками необходимо установить перемычку в цифровой порт 11.

· Вводы ограничительного переключателя: Использование кода по умолчанию позволяет выполнять установку перемычек или переключателей в аналоговые порты, чтобы ограничить определенные направления вращения электромотора. Эта техника может использоваться для остановки электромотора при достижении рукой робота нижнего предела движения. Ограничительный переключатель, подключенный через аналоговый порт 1, при активации ограничивает движение электромотора 6 против часовой стрелки. Ограничительный переключатель, подключенный через аналоговый порт 2, при активации ограничивает движение электромотора 6 по часовой стрелке.

4. Работа по умолчанию:
В прилагаемых таблицах приводятся данные и варианты ввода джойстика и отклика электромотора. С помощью приведенных комбинаций управления, при нажатии ручек управления вверх робот движется вперед. Обратите внимание на различные комбинации перемычек для каждого раздела.
Необходимо обратить внимание на следующее: Код по умолчанию для микроконтроллера Cortex может отличаться от кода по умолчанию микроконтроллера PIC. Для обеспечения надлежащего поведения робота необходимо использовать данные таблиц, представленных в настоящем документе.


· Микроконтроллер Cortex может быть запрограммирован с помощью пользовательского кода. Порядок настройки аппаратного обеспечения для беспроводной загрузки представлен ниже. Для выполнения беспроводной загрузки допускается замена ключей VEXnet на кабель USB A-A. Вы можете также загрузить код напрямую в микроконтроллер с помощью кабеля USB A-A.

5. Диагностические данные:
В следующей таблице представлены комбинации для джойстика и микроконтроллера с пояснениями. (нажмите на таблицу для увеличения)


6. Процедура калибровки джойстика VEXnet:
1. 1. Необходимо выполнить сопряжение джойстик и микроконтроллера Cortex с помощью ключей VEXnet.
2. Задний переключатель 6U удерживать в нажатом положении.
3. Одновременно, с помощью малого торцового шестигранного ключа (1/16" или меньше) или аналогичной прямой отвертки нажать и удерживать в этом положении переключатель CONFIG.
4. Удерживать переключатели в нажатом положении до тех пор, пока индикатор джойстика не начнет мигать красным или зеленым - теперь можно отпустить оба переключателя.
2.
· На выполнение этих двух операций отводится не более 10 секунд.
3. 5. Переместить оба аналоговых джойстика в максимальное желаемое положение во всех четырех направлениях - вверх, назад, влево и вправо.
· Если движение во всех четырех направлениях не зафиксировано, по истечении 10 секунд выполняется тайм аут и выход из режима калибровки. Индикатор VEXnet при этом будет коротко мигать красным.
· В процессе калибровки, индикатор джойстика будет продолжать мигать красным и зеленым.
4. 6. После того, как движение зафиксировано во всех четырех направлениях, индикатор джойстика переключится в состояние «Вкл.» (ON) и будет непрерывно гореть зеленым.
· Чтобы сохранить настройки, необходимо нажать и удерживать верхнюю кнопку 8U.
· Если настройки были приняты и сохранены, индикатор джойстика в течение нескольких секунд будет быстро мигать зеленым.
· Если настройки не были сохранены, по истечении 10 секунд выполняется тайм аут и выход из режима калибровки. Индикатор VEXnet при этом будет коротко мигать красным.
· Чтобы сбросить настройки, необходимо нажать и удерживать верхнюю кнопку 7U. Будет выполнен выход из режима калибровки и индикатор VEXnet начнет коротко мигать красным.
· Если режим калибровки был прерван или сохранен, индикаторы джойстика переключатся в режим нормального функционирования после короткого проблеска индикатора VEXnet.
5. 7. После загрузки ведущей прошивки в джойстик, потребуется выполнение повторной калибровки.

7. Блок-схема устранения основных неисправностей робота (нажмите на схему для открытия в отдельном окне):

8. Блок-схема устранения неисправностей VEXnet (нажмите на схему для открытия в отдельном окне):
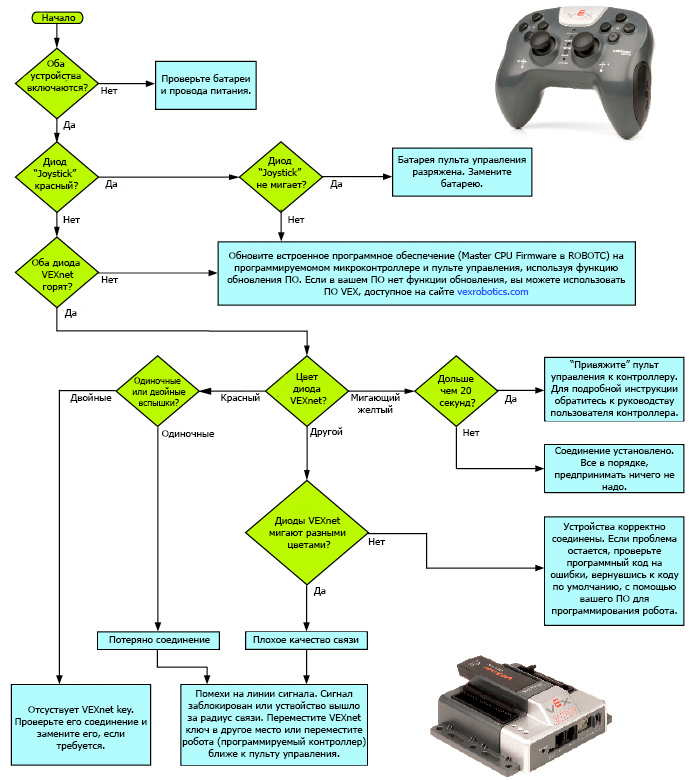
Если после выполнения инструкций ошибка присутствует, необходимо обновить прошивку VEXnet на микроконтроллере и джойстике до последней версии (ведущая прошивка ЦП для пользователей ROBOTIC/Master CPU Firmwarefor ROBOTC users). Если проблема не решена, попробуйте использовать другой комплект ключей VEXnet. Для получения дополнительной поддержки необходимо опубликовать запрос на форуме VEX (vexforum.com) или связаться с технической поддержкой по телефону +7 (495) 641-00-19, +7 (495) 641-00-23 или электронной почте support@examen-technolab.ru
9. Блок-схема устранения неисправностей электромотора (нажмите на схему для открытия в отдельном окне):

10. Аналоговые данные:
Аналоговые линии предназначены только для ввода и чтения прибл. 0,2 вольт в разомкнутом состоянии. Данные цепи:
1. 1. Диапазон аналогового ввода от 0 до +5 вольт.
2. Разрешение преобразования аналоговый-цифровой 12 бит, разрешение компилятора может различаться.
3. Аналоговая цепь имеет повышение 470 К на +5 вольт, последовательный резистор на 10 К и заземляющий резистор на 20 К.
4. Аналоговые вводы также имеют конденсатор 1000 пФ на землю на стороне процессора резистора на 10 К.
5. Ширина полосы частот 3 дБ: 16 кГц.
Соединения в цепи показаны ниже.

11. Цифровые данные:
В конфигурации ввода, цифровые линии имеют слабое повышение напряжения. В конфигурации вывода, цифровые линии передают 0 вольт для сигнала напряжения низкого уровня и 3,3 вольта - для сигнала напряжения высокого уровня. Данные цепи:
1. 1. Диапазон цифрового ввода от 0 до +5 вольт.
2. Цифровой привод ограничен последовательным резистором на 1 К, поэтому он может выводить высокий сигнал 2 В в 2 К-Ом на землю, или низкий сигнал 0,8 В в 7 К-Ом на 3,3 В.
3. Цифровые вводы также имеют конденсатор 1000 пФ на землю на стороне процессора резистора на 1 К.
4. Ширина полосы частот ввода 3 дБ: 150 кГц.
5. Соединения в цепи показаны ниже.

12. Данные цепи цифро-аналогового порта, SP:
1. 1. Цепь SP присоединяется к выводу цифро-аналогового преобразователя (ЦАП) на пользовательском процессоре.
2. Вывод ЦАП не поддерживается исходным заводским Hex-файлом. Необходимо проверить компьютер на готовность и совместимость.
3. SP - это аналоговый вывод в конфигурации компилятора. Привод изначально ограничен внутренним сопротивлением процессора 5 К-Ом и последовательным резистором на 100 Ом. Стандартный выходной перепад напряжения процессора при разрыве нагрузки составляет от 0,2 до 3,1 В.
13. Выводы порта 2-проводного электромотора:
1. 1. Моторный порт 1 и моторный порт 10.
2. Максимальный ток при заторможенном электромоторе: 3,0 ампер при 8,5 вольта.
3. Скорость прерывания электромотора: определяется компилятором. Скорость прерывания кода по умолчанию: 1 кГц.
4. Защита от перегрузок: Моторные порты 1-5 снабжены одним предохранителем на 4 ампера. Моторные порты 6-10 снабжены еще одним предохранителем на 4 ампера.
14. Выводы порта 3-проводного электромотора:
1. 1. Моторные порты 2-9.
2. Максимальный ток при заторможенном электромоторе: ограничен внутренними параметрами сборки электромотора.
3. Выходной ШИМ-сигнал электромотора: определяется компилятором. По умолчанию установлено не более 1-2 миллисекунд, и период 17 миллисекунд.
4. Защита от перегрузок: Моторные порты 1-5 снабжены одним предохранителем на 4 ампера. Моторные порты 6-10 снабжены еще одним предохранителем на 4 ампера.
15. Соединения УАПП:
1. 1. Земля, питание (+5 В), прием данных RX, передача данных TX. Скорость передачи данных, формат в один байт, (передача) стоп-биты, контроль четности и пр. - определяется компилятором.
2. По умолчанию для данных жидкокристаллического дисплея: 19 200 бод, 8 бит данных, 1 стоп-бит, без бита четности и без контроля потока.
16. Соединения I2C:
1. 1. Земля, питание (+5 В), часы, данные. Скорость передачи данных, формат в один байт, (передача) стоп-биты, контроль четности и пр. - определяется компилятором.
2. I2C не поддерживается исходным заводским Hex-файлом.
17. Примечания:
1. 1. Нельзя использовать разветвитель USB с микроконтроллером Cortex и джойстиком. В случае необходимости, необходимо устанавливать прямое соединение через USB порт на ПК. Работа с разветвителем USB не поддерживается.