МАШИНЫПЕРЕМЕННОГО ТОКА
1.Трехфазные обмотки машин переменного тока.
В основе работы всех машин пер. тока лежит вращающееся магнитное поле. Трехфазная сис-ма питания, симметрич. трехфазная обмотка расположенная в пространстве под углом 120 эл. градусов создается вращающееся магнитное поле. Z – число зубцов, р – число пар полюсов, τ – полюсное деление, q – число пазов на полюс и фазу, m – число фаз, y – первичный шаг обмотки. Если y = τ, β = 1 – обмотка с полным шагом, y < τ, β < 1 – обмотка с укороченным шагом, y > τ, β > 1 – обмотка с удлиненным шагом. β = y/τ – относительный шаг обмотки. Однослойная – когда в пазу одна сторона катушки.
Двухслойная - когда в пазу обе стороны катушки. Если q = 1 – нераспределенная, т.е. в одном пазу одна катушка, если q > 2 – распределенная.
2.Принцип построения трехфазной обмотки
В электрических машинах, как правило, применяются симметричные обмотки. Для трехфазных симметричных обмоток необходимо выполнить следующие условия. Все три фазы обмотки должны находиться в одинаковых условиях. Во всех трех фазах должны наводиться одинаковые ЗДС. Электродвижущие силы фаз должны быть сдвинуты на 120°. Обмотка делится на секции. Секции в свою очередь состоят витков. Секции обмотки имеют две стороны. В двухслойных обмотках одна сторона секции лежит в нижней части паза, а другая — в верхней. Чтобы одна часть секции лежала в нижней части паза, а другая — в верхней, лобовые части обмотки специально профилируются. Лобовые части обмоток отгибаются в радиальном направлении.

В случае укороченной или удлиненной обмотка также представляется как однослойные смещенные на величину укорочения или удлинения.
3.Принцип образования вращающегося магнитного поля в машинах переменного тока.
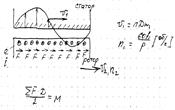
Для упрощения магнитное поле электрических машин может рассматриваться как стационарное и в первом приближении — как плоскопараллельное. Электромеханическое преобразование энергии почти во всех электрических машинах связано с вращающимся магнитным полем. При этом в понятие стационарного магнитного поля вкладывается тот смысл, что в любой момент времени амплитуда и форма магнитного поля остаются неизменными. Вращающееся магнитное поле при неподвижных обмотках в трехфазной системе может быть создано, если разместить в пазах обмотки так:

В результате получаем, что результирующий поток будет совпадать осями фаз А, В, С через 120 эл. градусов и при совпадении с фазой в ней будет max значение тока. Мгновенные значения токов в фазах для времени, соответствующего положению векторной диаграммы, равны ia = Imax, ib = ic = -Imax/2. Токи в левой и правой половинах машины совпадают по модулю, и в воздушном зазоре создается поле. При изменении токов во времени происходит вращение поля в воздушном зазоре. Таким образом, благодаря определенному расположению обмоток в пространстве и сдвигу токов во времени в электрических машинах образуется вращающееся магнитное поле. Если взять фиксированное время и перемещать точку по магнитному зазору, то мы получим синусоидальный з – н изменения потока в пространстве зазора.
4.ЭДС обмотки машин переменного тока (коэффициент скоса, обмоточный коэффициент).
Электродвижущая сила в витке может наводиться при вращении витка в магнитном поле или при перемещении магнитного поля относительно витка.

Электродвижущая сила в витке наводится также, если неподвижный виток пронизывается изменяющимся во времени магнитным потоком.

В общем случае ЭДС в витке наводится при пространственном перемещении поля и витка относительно друг друга, а также при изменении потока, сцепленного с витком, во времени. Электродвижущая сила, обусловленная относительным перемещением нитка и поля, называется ЭДС вращения. Электродвижущую силу, зависящую от изменения потока во времени, называют трансформаторной ЭДС.
Электродвижущая сила вращения: ex = Bxlδυ, lδ – активная длина нитка; υ — линейная скорость. Электродвижущая сила секции (катушки), состоящей из нескольких витков,  . Здесь ψк — максимальное потокосцепление катушки, ψк = ψкmcos(ωt-αк). Электродвижущая сила, которая наводится в катушке, зависит от выполнения катушки. В катушке, состоящей из витков с диаметральным шагом, максимальный поток от 1-й гармоники индукции равен: Фm=2В1mS/π, В1m — амплитуда индукции первой гармоники; S= lδτ — площадь, пронизываемая потоком. Для катушки с нитками, имеющими укорочение Ф = куФm где ку — коэффициент укорочения, который учитывает уменьшение ЭДС за счет укорочения шага витков катушки. При укорочении шага относительный шаг β = y/τ меньше единицы. При этом ЭДС двух проводников нитка Е1пр и Е11пр одинаковые, но сдвинуты по фазе на угол βπ.
. Здесь ψк — максимальное потокосцепление катушки, ψк = ψкmcos(ωt-αк). Электродвижущая сила, которая наводится в катушке, зависит от выполнения катушки. В катушке, состоящей из витков с диаметральным шагом, максимальный поток от 1-й гармоники индукции равен: Фm=2В1mS/π, В1m — амплитуда индукции первой гармоники; S= lδτ — площадь, пронизываемая потоком. Для катушки с нитками, имеющими укорочение Ф = куФm где ку — коэффициент укорочения, который учитывает уменьшение ЭДС за счет укорочения шага витков катушки. При укорочении шага относительный шаг β = y/τ меньше единицы. При этом ЭДС двух проводников нитка Е1пр и Е11пр одинаковые, но сдвинуты по фазе на угол βπ.

Поэтому ЭДС витка выражается формулой Ев=2Епрsin(βπ/2). Коэффициент укорочения равен отношению геометрической суммы ЭДС к арифметической сумме: Ку = sin(βπ/2). Поле в воздушном зазоре электрических машин отличается от синусоиды. Высшие гармоники появляются за счет несинусоидального распределения МДС, наличия зубцов на статоре и роторе, насыщения и других причин. Для уменьшения влияния высших гармоник на характеристики машины применяют обмотку с укороченным шагом, выполняют скос пазов и принимают другие меры. Скос пазов выполняется на зубцовое деление статора или ротора и обеспечивает уменьшение влияния высших гармоник, так как в скошенном витке ЭДС от высших гармоник компенсируется. При скосе пазов уменьшается ЭДС и 1-й гармоники. Уменьшение ЭДС 1-й гармоники за счет скоса определяет коэффициент скоса кск. При скосе пазы статора и ротора расположены под некоторым углом γск. Скос пазов уменьшает влияние высших гармоник на работу машины, улучшая форму ЭДС и снижает шумы и вибрации. Однако скос пазов увеличивает длину витка, что приводит к увеличению активного сопротивления и индуктивного сопротивления рассеяния.

кск = sin(γск/2)/0,5 γск
Электродвижущая сила катушечной группы Еq равна геометрической сумме ЭДС отдельных катушек, а не арифметической сумме из-за того, что катушки расположены в пазах на внутренней или внешней поверхности цилиндра статора или ротора, сдвинутых относительно друг друга в магнитном поле 1-й гармоники на угол α = π/mq. Коэффициент распределения обмотки характеризует уменьшение ЭДС из-за пространственного сдвига катушек по отношению друг к другу и равен: кр=Еq/qEk.


Тогда коэффициент распределения m – фазной обмотки определяется: кр=sin(α/2)/qsin(α/2q).
Обмоточный коэффициент – это произведение коэф. укорочения на коэф. распределения.
5.МДС обмоток машин переменного тока.
Магнитное поле в электрической машине создается токами, протекающими в обмотках. Если допустить, что равномерный гладкий зазор машины δ мал по сравнению с диаметром ротора и полюсным делением и машина не насыщена, то форма магнитного поля определяется формой МДС. Магнитодвижущая сила катушки с диаметральным шагом при принятых допущениях без учета толщины катушки равна: 2Fk=ωkik. Катушка имеет два полюса (северный и южный), поэтому на один полюс принимается Fk. Прямоугольную волну МДС можно разложить в ряд Фурье:  . Магнитодвижущая сила катушки состоит из бесконечного ряда не четных гармоник, каждая из которых изменяется по гармоническому закону в пространстве (соs υα) и во времени (соs ωt). При обтекании катушки переменным током амплитудное значение
. Магнитодвижущая сила катушки состоит из бесконечного ряда не четных гармоник, каждая из которых изменяется по гармоническому закону в пространстве (соs υα) и во времени (соs ωt). При обтекании катушки переменным током амплитудное значение
первой гармоники МДС: F1m = 4  . Магнитодвижущая сила фазы равняется сумме МДС системы катушек, составляющих обмотку. В общем случае МДС для m – фазной обмотки для υ – й гармоники:
. Магнитодвижущая сила фазы равняется сумме МДС системы катушек, составляющих обмотку. В общем случае МДС для m – фазной обмотки для υ – й гармоники:  . Форма МДС изменяется во времени, а ее вид зависит от выполнения обмотки — одно- или двухслойной, числа пазов на полюс и фазу и укорочения. Кривая приближается к синусоиде, когда q увеличивается, а укорочение у=0,8τ. Однако синусоидальное распределение МДС возможно только при синусоидальном неравномерном распределении витков в пазах. Обмотки с дробным имеют несимметричную кривую МДС, и она может иметь различный вид под разными парами полюсов.
. Форма МДС изменяется во времени, а ее вид зависит от выполнения обмотки — одно- или двухслойной, числа пазов на полюс и фазу и укорочения. Кривая приближается к синусоиде, когда q увеличивается, а укорочение у=0,8τ. Однако синусоидальное распределение МДС возможно только при синусоидальном неравномерном распределении витков в пазах. Обмотки с дробным имеют несимметричную кривую МДС, и она может иметь различный вид под разными парами полюсов.
6.Индуктивное сопротивление обмоток машин переменного тока.
Индуктивные и активные сопротивления относятся к фазе машины и определяются расчетным или опытным путем по схеме замещения и формулам проектирования. Главные индуктивные сопротивления: Xσ1 = E1/I1 – статор, Xσ2 = E2/I2 – ротор. Индуктивные сопротивления полей рассеяния: Xσ = Xп+Xл+Xк+Xд+Xc, λ = λп+λл+λк+λд+ λс. Xσ*=0,08 – 0,15.
8.Принцип работы АМ. Скольжение.
Действие момента приводит в движение ротора в том же направлении, что и поле статора n2 → n1, но n1≠ n2 т.к.М=0. S=(n1-n2)/n1 – относительное скольжение магнитного поля и самого ротора. n2=n1(1-S). I2 c f2 создает свое магнитное поле. n2p=f2/p=n1-n2. n2c=n2+n2p=n2+n1-n2=n1. т.е. магнитное поле ротора вращается вместе с магнитным полем статора синхронно.
9. Режимы работы АМ. Скольжение.
S=(n1-n2)/n1 – относительное скольжение магнитного поля и самого ротора.
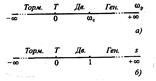
В асинхронных машинах частота вращения ротора не равна частоте вращения поля в воздушном зазоре (ωр ≠ ωс). Механическая частота вращения ротора асинхронных машин в установившемся режиме может быть ниже и выше синхронной частоты вращения поля, при этом ротор может вращаться в сторону, противоположную вращению поля. В генераторном режиме ротор вращается в ту же сторону, что и поле, но с большей частотой вращения. В тормозном режиме ротор асинхронной машины вращается в сторону, противоположную вращению поля. Когда асинхронная машина эксплуатируется при неподвижном роторе (ωр = 0), имеет место трансформаторный режим работы асинхронной машины. В двигательном режиме асинхронная машина преобразует электрическую энергию в механическую. В генераторном режиме ротор асинхронной машины вращается в сторону вращения поля с частотой, большей синхронной. При этом механическая энергия преобразуется в электрическую. В тормозном режиме механическая и электрическая энергии преобразуются в тепло. Этот режим, как правило, может быть кратковременным и используется для быстрого останова. Трансформаторный режим используется для регулирования амплитуды и фазы напряжения.

Двигатель

Генератор

Электромагнитный тормоз
10. Приведенная АМ.
Реальную машину анализировать сложно, поэтому ее упрощают и заменяют реальную машину на приведенную машину с неподвижным ротором.
S=1, f1=f2
S ≠ 1, f2=Sf1.
E2=4,44f1W2kоб2kcФ
E2S=4,44f2W2kоб2kcФ=SE2
В общем случае индуктивность обмотки ротора и сопротивление обмотки ротора зависят от частоты. Если пренебречь эффектом вытеснения тока обмотки ротора, то можно принять L2=const, r2=const – машина с постоянными параметрами. Для того чтобы привести вращающуюся машину к машине с неподвижным ротором достаточно заменить r2 на r2/S, т.е. ввести в цепь ротора добавочное сопротивление равное: r2д=(1-S)r2/S. Та мех. мощность которую развивал двигатель при своем вращении превратилась в электрическую мощность на добавочном сопротивлении. r2д – эквивалент механической мощности на валу двигателя. Pмех=(1-S)r2m2I22/S.
11. Схема замещения АМ.
Уравнения статора асинхронной машины получаются при обходе первого контура, а ротора — второго контура в схеме замещения. Уравнения и схема замещения записываются для одной фазы машины.

Падение напряжения на сопротивлении взаимной индукции х12 определяет ЭДС Е1=Е2. Сопротивление обмотки статора z1 = r1+jx1, а сопротивление обмотки ротора z21=r21+jx21. Потери в сопротивлении r21(1-S)/S эквивалентны механической мощности на валу машины Р21.

В системе не учитываются потери в стали. Их можно приближенно учесть, представив асинхронную машину как двухобмоточную — без учета контуров вихревых токов и введя в намагничивающий контур активное сопротивление r12, учитывающее потери в стали. Если потери в стали машины известны, то активное сопротивление: r12=Pст/m1I0a2. I0a – активная составляющая тока холостого хода. Определив активное сопротивление, эквивалентное потерям в стали, можно ввести в рассмотрение процессов преобразования энергии в асинхронных машинах главное сопротивление или сопротивление взаимной индукции: z12 = r12+jx12. При приведении вращающейся машины к неподвижной ток в роторе остается неизменным. Таким образом, реальная асинхронная машина приводится к неподвижной за счет изменения активного сопротивления ротора до – r21/S. Токи, активные мощности и потери во вращающейся машине и неподвижной остаются неизменными. С увеличением мощности машин относительные значения активных сопротивлений уменьшаются, а индуктивных сопротивлений возрастают. Индуктивное сопротивление х12* зависят от соsφ машины. Чем ниже соsφ, т.е. чем больше реактивная мощность, потребляемая из сети, тем меньше х12*. Чем больше число полюсов в машине, тем меньше х12*. Сопротивление взаимной индукции x12* в основном определяется воздушным зазором. Более удобной схемой замещения АМ является Г образная схема замещения, в которой намагничивающий контур вынесен на вывод сети. В этой схеме замещения ток холостого хода не зависит от нагрузки и совпадает с действительным током I0 в Т-образной схеме замещения при идеальном холостом ходе, когда S=0. При холостом ходе в АД S близко к нулю, но не равно ему, так как двигатель из сети потребляет активную мощность, идущую на покрытие механических потерь и потерь в стали.

При идеальном холостом ходе электромагнитная мощность Рэм равна нулю, но двигатель потребляет из сети активную мощность, которая идет на покрытие потерь в стали. В этом режиме асинхронный двигатель устойчиво работать не может и должен вращаться другой машиной.

В двигателях общего назначения С1 мало отличается от единицы. С1 – это есть отношение напряжения U1 к ЭДС – Е1 при идеальном х.х.: С1=U1/-E1.
12. Вращающий момент и механическая характеристика АМ.
Электромагнитные силы и электромагнитный момент по поверхности распределены неравномерно и изменяют направление. Так как преобразование энергии в электрических машинах происходит в воздушном зазоре, где сосредоточена энергия магнитного поля, электромагнитный момент приложен к зубцам статора и ротора. Если поток проходит по зубцам, а в пазу поток равен нулю, то момент к обмотке не приложен. Обычно статор прикреплен к фундаменту и не перемещается, а вращается ротор машины. Если дать возможность и ротору, и статору, они будут вращаться в противоположные стороны, причем сумма угловых скоростей ротора и статора будет примерно равна ωс — угловой синхронной скорости поля.

Рассматривается идеальная машина, поэтому можно, пренебрегая механическими потерями, считать, что Мэм равен М — моменту на валу. По предыдущей формуле построена механическая характеристика АМ М=f(S) при U1 и f1 = const. Механическая характеристика также представляет собой зависимость частоты вращения ротора от момента n=f(M) или наоборот M=f(n).

Механическая характеристика АМ
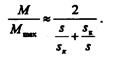
Подставляя в формулу различные значения S, можно получить зависимость М = f(S) для всех режимов работы АМ. Согласно формуле М = 0 при S = 0 и S =±∞. Следует, что момент имеет максимум при S= ±Sкр т.е. при критическом скольжении. При увеличении скольжения от 0 до ±Sкр момент растет, а затем уменьшается. При этом ток I21 продолжает расти, но растет реактивная составляющая, а активная уменьшается. За счет увеличения тока I1 уменьшается ЭДС и поток машины.

Механическая характеристика АД
Выражение для определения механической характеристики громоздкое и для упрощенных расчетов неудобное. Простая формула для описания механической характеристики
13. Опыт х.х. и к.з. АМ.
Холостой ход.
Питание асинхронного двигателя при опыте х.х. осуществляется через индукционный регулятор напряжения ИР или регулировочный автотрансформатор, позволяющие изменять напряжение в широких пределах. При этом вал двигателя должен быть свободным от механической нагрузки.

Опыт начинают с повышенного напряжения U1 = 1,15U1н, затем постепенно понижают напряжение до 0,4U1н так, чтобы снять показания приборов в 5—7 точках. При этом один из замеров должен соответствовать номинальному напряжению U1н. Измеряют линейные значения напряжений и токов и вычисляют их средние значения:

а затем в зависимости от схемы соединения обмотки статора определяют фазные значения напряжения и тока х.х.:
при соединении в звезду:

при соединении в треугольник:

Ваттметр W измеряет активную мощность Р0 потребляемую двигателем в режиме х.х., которая включает в себя электрические потери в обмотке статора m1*I02*r1 магнитные потери в сердечнике статора Рм и механические потери Рмех (Вт):

Здесь r1 — активное сопротивление фазы обмотки статора (Ом), измеренное непосредственно после отключения двигателя от сети, чтобы обмотка не успела охладиться.
По результатам измерений и вычислений строят характеристики х.х. строят,I0, Ро, Р01 и cosφ = f(U1).
Для асинхронных двигателей с фазным ротором в опыте холостого хода определяют коэффициент трансформации напряжений между обмотками статора и ротора. Этот коэффициент с достаточной точностью может быть определен по отношению средних арифметических линейных (междуфазовых) напряжений статора к аналогичным напряжениям ротора.
Короткое замыкание.
Схема соединений асинхронного двигателя при опыте к.з. остается, как и в опыте х.х. Но при этом измерительные приборы должны быть выбраны в соответствии с пределами измерения тока, напряжения и мощности. Ротор двигателя следует жестко закрепить, предварительно установив его в положение, соответствующее среднему току к.з. С этой целью к двигателю подводят небольшое напряжение (Uk=0,1U1н) и, медленно поворачивая ротор, следят за показанием амперметра, стрелка которого будет колебаться в зависимости от положения ротора двигателя – из – за взаимного смещения зубцовых зон ротора и статора, вызывающего колебания индуктивных сопротивлений обмоток двигателя. Предельное значение тока статора при опыте к.з. устанавливают исходя из допустимой токовой нагрузки питающей сети и возможности провести опыт в минимальный срок, чтобы не вызвать опасного перегрева двигателя. Для двигателей мощностью до 1 кВт возможно проведение опыта начиная с номинального напряжения Uk=U1н. В этом случае предельный ток Ik= (5-7)I1н. Для двигателей большей мощности сила предельного тока Ik = (2,5+5)I1н. При выполнении опыта к.з. желательно соединение обмотки статора звездой. Определив диапазон изменения тока статора при опыте к.з., опыт начинают с предельного значения этого тока, установив на индукционном регуляторе соответствующее напряжение к.з. Uk. Затем постепенно снижают это напряжение до значения, при котором ток Ik достигнет нижнего предела установленного диапазона его значений. При этом снимают показания приборов для 5—7 точек, одна из которых должна соответствовать номинальному току статора (Ik = I1н) Продолжительность опыта должна быть минимально возможной. С этой целью измеряют лишь одно линейное напряжение, так как некоторая несимметрия линейных напряжений при опыте к.з. не имеет значения.
Ваттметр W измеряет активную мощность к.з. Рк. По полученным значениям напряжений Uk, токов Ik и мощностей Рk вычисляют следующие параметры:
коэффициент мощности при к.з.

активные и индуктивные составляющие этого сопротивления (Ом)

полное сопротивление к.з. (Ом)

При опыте к.з. обмотки двигателя быстро нагреваются до рабочей температуры, так как при неподвижном роторе двигатель не вентилируется.
Измеренные и вычисленные величины заносят в таблицу, а затем строят характеристики к.з.: Ik; Рk и соsφk = f(Uk).
Магнитные потери при опыте к.з. Рмк приближено определяют по характеристикам х.х. при напряжении U1=Uk. В режиме х.х. магнитный поток Ф больше, чем в режиме к.з., но если в режиме х.х. магнитные потери происходят только в сердечнике статора, то в режиме к.з. (S = 1) магнитные потери происходят еще и в сердечнике ротора, так как f2=f1. Начальный пусковой момент получают пересчетом момента Мk на начальный пусковой ток Iп: Mп = Mk(Iп/Ik)2. Затем определяют кратность пускового момента Mп/Mн.
14. Методы пуска АД.
Пуск непосредственным включением в сеть. Этот способ пуска, отличаясь простотой, имеет существенный недостаток: в момент подключения двигателя к сети в обмотке ста- тора возникает большой пусковой ток, в 5—7 раз превышающий номинальный ток двигателя. При небольшой инерционности исполнительного механизма частота вращения двигателя быстро достигает установившегося значения, и пусковой ток также быстро спадает, не вызывая перегрева обмотки статора. Но такой значительный бросок тока в питающей сети может вызвать в ней заметное падение напряжения. Однако этот способ пуска благодаря своей простоте получил наибольшее применение для двигателей

мощностью до 38—50 кВт и более (при достаточном сечении жил токоподводящего кабеля). При необходимости уменьшения пускового тока двигателя применяют какой-либо из способов пуска короткозамкнутых двигателей при пониженном напряжении.
Пуск при пониженном напряжении. Пусковой ток двигателя пропорционален подведенному напряжению U1 уменьшение, которого вызывает соответствующее уменьшение пускового тока. Работа при соединении обмоток статора треугольником, можно применить
Пуск переключение обмотки статора со звезды на треугольник.

В момент подключения двигателя к сети переключатель ставят в положение «звезда», при котором обмотка статора оказывается соединенной в звезду. При этом фазное напряжение на статоре понижается в  раз. Во столько же раз уменьшается и ток в фазных обмотках двигателя. Кроме того, при соединении обмоток звездой линейный ток равен фазному, в то время как при соединении этих же обмоток треугольником линейный ток больше фазного в раз. Следовательно, переключив обмотки статора звездой, мы добиваемся уменьшения линейного тока в 3 раза. После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, переключатель быстро переводят в положение «треугольник» и фазные обмотки двигателя оказываются под номинальном напряжением. Возникший при этом бросок тока является незначительным. Способ пуска имеет существенный недостаток — уменьшение фазного напряжения в раз сопровождается уменьшением пускового момента в три раза, так как пусковой момент АД прямо пропорционален квадрату напряжения U1. Такое значительное уменьшение пускового момента не позволяет применять этот способ пуска для двигателей, включаемых в сеть при значительной нагрузке на валу.
раз. Во столько же раз уменьшается и ток в фазных обмотках двигателя. Кроме того, при соединении обмоток звездой линейный ток равен фазному, в то время как при соединении этих же обмоток треугольником линейный ток больше фазного в раз. Следовательно, переключив обмотки статора звездой, мы добиваемся уменьшения линейного тока в 3 раза. После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, переключатель быстро переводят в положение «треугольник» и фазные обмотки двигателя оказываются под номинальном напряжением. Возникший при этом бросок тока является незначительным. Способ пуска имеет существенный недостаток — уменьшение фазного напряжения в раз сопровождается уменьшением пускового момента в три раза, так как пусковой момент АД прямо пропорционален квадрату напряжения U1. Такое значительное уменьшение пускового момента не позволяет применять этот способ пуска для двигателей, включаемых в сеть при значительной нагрузке на валу.
Реакторный пуск.

При разомкнутом рубильнике 2 включают рубильник 1. При этом ток из сети поступает в обмотку статора через реакторы Р, на которых происходит падение напряжения. В результате на обмотку статора подается пониженное напряжение. После разгона ротора двигателя включают рубильник 2 и подводимое к обмотке статора напряжение оказывается номинальным. Недостаток этого способа пуска состоит в том, что уменьшение напряжения сопровождается уменьшением пускового момента М.
Пуск двигателя через понижающий автотрансформатор.

Вначале замыкают рубильник 1, соединяющий обмотки автотрансформатора звездой, а затем включают рубильник 2 и двигатель оказывается подключенным на пониженное напряжение U11. При этом пусковой ток двигателя, измеренный на выходе автотрансформатором уменьшается в КА раз, где КА — коэффициент трансформации автотрансформатора. После первоначального разгона ротора двигателя рубильник1 размыкают и автотрансформатор превращается в реактор. При этом напряжение на выводах обмотки статора несколько повышается, но все же остается меньше номинального. Включением рубильника 3 на двигатель подается полное напряжение сети.
15. Методы регулирования скорости АД.
n2=n1(1-S)=60f1(1-S)/p
Несмотря на то, что существует 3 способа регулирования, проблема все равно является острой и актуальной.
- изменение f1,
- изменение р,
- изменение S.
16. Асинхронный фазорегулятор.
При заторможенном роторе асинхронной машины сдвиг между ЭДС Е1 и Е2, которые индуктируются в фазах обмоток статора и ротора, определяется электрическим углом β между осями этих фаз, так как обе ЭДС индуктируются общим вращающимся магнитным полем. Изменение угла сдвига приводит к изменению фазы ЭДС Е2. Такая возможность регулирования фазы ЭДС Е2 используется в фазорегуляторе, который представляет собой трехфазную асинхронную машину с контактными кольцами в режиме трансформатора. Обмотка статора присоединяется к сети, к обмотке ротора через контактные кольца присоединяется нагрузка. Если пренебречь активными сопротивлениями и индуктивными сопротивлениями рассеяния обмоток статора и ротора, то U1= -Е1, U2 = Е2 и при идентичности обмоток (ω1 = ω2) Е1 = Е2. При повороте ротора, комплекс U2 = E2 также поворачивается относительно комплекса U1 = -Е1.
На ротор фазорегулятора действует значительный электромагнитный момент. Для преодоления этого электромагнитного момента при повороте ротора в качестве усилителя момента используется червячная передача. Параметры червячной пары выбираются таким образом, чтобы перемещение ротора можно было произвести вручную или с помощью электродвигателя небольшой мощности. Одновременно червяк служит для фиксации ротора в выбранном положении.
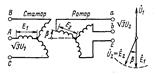
17. Индукционный регулятор.

Для плавного регулирования напряжения может быть использована трехфазная асинхронная машина в режиме трансформатора, если выполнить электрическое соединение обмотки статора с фазной обмоткой заторможенного ротора по схеме автотрансформатора. Первичная обмотка, которую обычно располагают на роторе, включается в сеть с фазным напряжением U1. Вращающееся магнитное поле, созданное током этой обмотки, наводит в ней ЭДС Е1 и во вторичной обмотке ЭДС Е2. Напряжение фазы вторичной обмотки, если пренебречь сопротивлением этой обмотки, равно геометрической сумме напряжения сети U1 и ЭДС E2. Угол сдвига β между векторами U1 и Е2, а следовательно, и напряжение U2 зависят от электрического угла взаимного сдвига осей фаз обмоток статора и ротора. При по вороте ротора концы векторов Е2и U2 перемещаются по окружности. Минимальному и максимальному напряжениям соответствуют углы поворота β=00, β=1800. Первичная обмотка индукционного регулятора может соединяться либо в звезду, либо в треугольник. Поворот и фиксация ротора осуществляются в индукционном регуляторе таким же образом, как в фазорегуляторе.
18. Асинхронный преобразователь частоты.

Частота ЭДС в роторе асинхронной машины определяется разностью частот вращения ротора и магнитного поля: f2=(Ω1 – Ω)p/2π=Sf1, где Ω>0 при согласном направлении вращения ротора относительно поля. Поэтому на контактных кольцах асинхронной машины с фазной обмоткой на роторе можно получить напряжение частоты f2 т. е. она может использоваться в качестве преобразователи частоты. Асинхронный преобразователь частоты может служить источником напряжения как постоянной, так и переменной частоты f2. При генерировании ЭДС частоты f2>f1 ротор преобразователя частоты приводится во вращение посторонним двигателем Д (обычно асинхронным или синхронным), который передает преобразователю частоты ПЧ мощность Р2, асинхронный преобразователь работает со скольжением S > 1 в режиме тормоза. При генерировании ЭДС частоты f2<f1 ротор преобразователи тормозится электромагнитным моментом машины Д, которая в этом случае работает в генераторном режиме, отдавая электроэнергию в ту же сеть, что и преобразователь, асинхронная машина-преобразователь работает в режиме двигателя. Для плавного регулирования частоты f2 необходимо регулировать или частоту f1 или частоту вращения приводного двигателя.
20. Однофазная АМ.

Двигатели этого типа уступают по своим технико-экономическим показателям трехфазным и применяются в тех случаях, когда можно получить питание только от однофазной сети переменного тока. Первичная обмотка этого двигателя, располагающаяся в пазах магнитопровода статора, выполняется однофазной. По устройству ротора однофазный двигатель ничем не отличается от трехфазного асинхронного двигателя с вторичной обмоткой в виде беличьей клетки. Первичную обмотку однофазного двигателя можно рассматривать как двухфазную обмотку, в которой отключена одна из фаз, например фаза А. Такая однофазная обмотка образуется из оставшейся фазы В двухфазной обмотки, занимает 1/2 полюсного деления и имеет достаточно большой коэффициент распределения. Ток однофазной обмотки создает пульсирующую МДС, которую можно разложить на две вращающиеся волны: прямую и обратную. Прямая волна МДС вращается с угловой скоростью в сторону вращения ротора; обратная с угловой скоростью в противоположную сторону.
Первичная обмотка этого двигателя, располагающаяся в пазах магнитопровода статора, выполняется однофазной. По устройству ротора однофазный двигатель ничем не отличается от трехфазного асинхронного двигателя с вторичной обмоткой в виде беличьей клетки. Первичную обмотку однофазного двигателя можно рассматривать как двухфазную обмотку, в которой отключена одна из фаз, например фаза А. Такая однофазная обмотка образуется из оставшейся фазы В двухфазной обмотки, занимает 1/2 полюсного деления и имеет достаточно большой коэффициент распределения. Ток однофазной обмотки создает пульсирующую МДС, которую можно разложить на две вращающиеся волны: прямую и обратную. Прямая волна МДС вращается с угловой скоростью в сторону вращения ротора; обратная с угловой скоростью в противоположную сторону.
Вращающий момент однофазного двигателя М складывается из вращающих моментов прямой и обратной составляющих эллиптического поля М = М1 + М2.

Из этого графика следует, при неподвижном роторе S=1 отсутствует пусковой момент. Достаточно, извне привести в движение ротор в одно из направлений и появится момент. Машина раскрутится до номинального режима. Для того чтобы создать в машине пусковой момент, нужно создать вращающееся поле или усилить одно из направлений этих полей. Для этого однофазный двигатель обеспечивается двумя обмотками рабочей и пусковой, которые расположены в пространстве под углом 900. если обеспечить 900 сдвиг в пространстве и 900 сдвиг токов, то мы получим вращающееся электрическое поле.
22. Векторные диаграммы АМ в различных режимах ее работы.

а) режим двигателя, б) холостой ход, в) режим генератора
23. Круговая диаграмма АМ.
При проектировании и эксплуатации асинхронных машин необходимо знать, как будут изменяться токи, потери, КПД и соsφ при изменении нагрузки на валу машины. Круговая диаграмма наглядно и с достаточной точностью позволяет определить показатели машины при изменении S от -∞ до +∞. При изменении скольжения конец вектора тока I1 описывает непрерывную замкнутую кривую, которая называется геометрическим местом тока. При U1 и f1 = const и постоянных параметрах (неизменных активных и индуктивных сопротивлениях) геометрическим местом концов векторов тока I1, является окружность. Эта окружность вместе с дополнительными прямыми называется круговой диаграммой АМ. Круговая диаграмма имеет важное значение в теории АМ и до сих пор используется для построения рабочих характеристик. С помощью круговой диаграммы можно исследовать с достаточной точностью все статические характеристики асинхронной машины. Круговая диаграмма позволяет определить основные показатели машины во всех режимах работы. Все это можно сделать на стадии проектирования, не проводя испытаний машины. После подключения к сети при увеличении нагрузки на валу АМ работает в двигательном режиме. При этом изменяется скольжение от 0 до 1, растет ток I1 от I1 = I0 до Ik в точке S=1 растет и ток в роторе I2, который можно определить из круговой диаграммы. После того как двигатель остановился S= 1, при дальнейшем увеличении активного момента сопротивления ротор начинает вращаться против направления вращения поля и асинхронная машина перейдет в тормозной режим. В большинстве случаев это кратковременный режим работы. В этом режиме и электрическая мощность, подводимая к статору машины, и механическая мощность, подводимая к валу, преобразуются в машине в тепло. В тормозном режиме машину часто используют для быстрого останова, изменяя направление вращения магнитного поля путем переключения порядка следования фаз. Генераторный режим работы АМ на круговой диаграмме занимает нижнюю дугу от точки идеального холостого хода S = 0 до S = -∞. Перевести машину из режима двигателя в генераторный режим можно путем изменения момента на валу. В генераторном режиме ротор вращается быстрее поля в том же направлении, что и поле. При этом машина отдает в сеть электрическую мощность, преобразуя механическую энергию в электрическую. При переходе из режима двигателя в генераторный режим сначала разгружается двигатель, а затем за счет момента на валу машина подводится к идеальному холостому ходу (S = О). В этом режиме механические потери покрываются мощностью, которая поступает с вала от внешнего источника механической мощности. При дальнейшем увеличении момента машина переходит в генераторный режим, причем сначала активная мощность в сеть не отдается, а лишь покрываются потери