Изучение типовой автоматической системы регулирования
Методические указания к лабораторной работе
С.-Петербург
УДК 62-52
Макарова Л.Ф. Изучение типовой автоматической системы регулирования с помощью компьютерного тренажера: Метод.указания / СПбГТИ(ТУ). – СПб., 2004.- 18 с.
В методических указаниях рассматриваются вопросы моделирования и анализа функционирования автоматической системы регулирования температуры в реакторе полного перемешивания, приводится описание работы с программной системой «ПИД-регулятор».
Методические указания предназначены для студентов 4-го курса химико-технологических факультетов и соответствуют рабочей программе дисциплины «Информационные технологии в проектировании» (раздел «Автоматизированное проектирование технологических процессов»).
Ил. 14, библиогр. 5 назв., прилож.
Рецензент: Г.В.Иванова, канд. техн. наук, доц.
кафедры автоматизации процессов
химических производств СПбГТИ
Утверждены на заседании учебно-методической комиссии факультета
информатики и управления..2004 г.
Рекомендованы к изданию РИСо СПбГТИ(ТУ).
ВВЕДЕНИЕ

 Современное химическое предприятие имеет сложную структуру управления, которая связана с особенностями технологии и организации. На каждой ступени системы управления решается своя задача, подчиненная общей цели управления предприятием в целом.
Современное химическое предприятие имеет сложную структуру управления, которая связана с особенностями технологии и организации. На каждой ступени системы управления решается своя задача, подчиненная общей цели управления предприятием в целом.
Первой, нижней ступенью являются технологические процессы, протекающие в отдельных аппаратах. Любой технологический аппарат находится под влиянием неконтролируемых и случайных возмущающих воздействий. Такими воздействиями могут быть изменения качества поступающего сырья или полуфабриката, старение катализатора, возникновение накипи на поверхности теплообмена, погодные условия (температура и влажность воздуха) и т.п.
Для нормального ведения технологического процесса (ТП) необходимо под-
держивать основные технологические переменные на постоянных значениях. Поэтому задача управления на этой ступени сводится к стабилизации заданных технологических режимов. Она решается с помощью локальных автоматических систем регулирования (АСР) разнообразных технологических параметров: температуры, состава, давления, уровня и др.
Качество локальных АСР определяется выбором рациональной схемы автоматического регулирования и законов регулирования ТП. При этом необходимо знание как свойств типовых химико-технологических процессов, так и автоматических регуляторов.
Проектирование химико-технологических систем надо проводить с учетом автоматического регулирования ТП. Каждый ТП должен предварительно анализироваться с точки зрения регулирования. На основе такого анализа следует выбирать схему АСР, а если это необходимо, корректировать технологические режимы и аппаратурное оформление.
Инженер-технолог должен четко представлять, какие требования к АСР данным процессом следует предъявлять и какими средствами автоматического регулирования их можно обеспечить.
1 Теоретические основы автоматического регулирования
1.1 Принцип автоматического регулирования
При рассмотрении работы АСР обычно отвлекаются от конкретного вида технологического аппарата и регулируемого параметра (например, температу-ры в контактном аппарате, влажности материала после сушки и т.п.), а рассматривают некоторый обобщенный объект управления, выходной переменной которого является регулируемая величина x (рисунок 1). При этом под объектом управления не обязательно понимать технологический аппарат или установку; определяющим признаком служит наличие канала воздействия регулируемой величины на регулируемую.
Например, в холодильнике регулирующей величиной может быть расход хладоагента, а регулируемой – температура продукта на выходе. Как правило, технологический аппарат имеет несколько таких каналов и соответственно несколько контуров регулирования.
Возмущения (f)
 ...
...
 |
Регулирующая Объект Регулируемая
 величина (m) управления величина (х)
величина (m) управления величина (х)

Рисунок 1 – Схема объекта управления
На рисунке 2 представлена схема АСР, построенной по принципу регулирования “по отклонению”
Регулируемая величина х измеряется датчиком (Д), сравнивается с заданным значением y, вычисленное отклонение e = |x-y|, называемое ошибкой регулирования, поступает в регулятор, в котором по некоторому заданному за- кону вырабатывается такой сигнал, который через исполнительный механизм (ИМ) и регулирующий орган (РО) приводит к изменению регулирующего воздействия m, направленному на уменьшение величины e.
Возмущения (f)

 ...
...



 у m х
у m х



 Регулятор ИМ РО Объект Д
Регулятор ИМ РО Объект Д
управления

 -х
-х
Рисунок 2 – Принципиальная схема АСР
Этот принцип регулирования является наиболее простым, универсальным и
распространенным. В такой АСР не нужно измерять возмущающие воздействия – они могут быть неконтролируемыми и иметь случайный характер; регулирующее воздействие вырабатывается не от изменения возмущающих влияний, а только от отклонения регулируемой величины от заданного значения. Важное значение в схеме регулирования имеет отрицательная обратная связь, которая замыкает контур
регулирования, связывая выходную переменную объекта х с заданием у.
 В теории автоматического управления (ТАУ), задачами которой являются синтез (построение) и анализ (исследование) систем управления, обычно используется структурная схема АСР (рисунок 3). В такой схеме ИМ и РО объединены с регулятором, а датчик – с объектом, кроме того, выделена схема сравнения для определения величины e.
В теории автоматического управления (ТАУ), задачами которой являются синтез (построение) и анализ (исследование) систем управления, обычно используется структурная схема АСР (рисунок 3). В такой схеме ИМ и РО объединены с регулятором, а датчик – с объектом, кроме того, выделена схема сравнения для определения величины e.
 f
f


 у e m х
у e m х



 Регулятор Объект
Регулятор Объект
 управления
управления
-х
 |
 - схема сравнения
- схема сравнения
Рисунок 3 – Структурная схема АСР
Практически все задачи регулирования промышленных объектов могут
быть решены с помощью трех простых законов регулирования:
1) Пропорциональный закон (П-регулятор): m = K . e
t
2) Пропорционально-интегральный закон (ПИ-регулятор): m = K.(e + (1/Tи).òe.dt)
0
3) Пропорционально-интегрально-дифференциальный закон (ПИД-регулятор):
t
m = K . (e + (1/Tи) . òe.dt + Tд. de/dt)
0
где K, Tи, Tд - параметры настройки регулятора, зависящие от динамических
свойств объекта управления. Их определение является одной
из задач расчета АСР.
Коэффициент усиления K определяет статические свойства регулятора. Постоянные времени Tи и Tд определяют динамические свойства.
1.2 Статические и динамические характеристики
Для расчета настроечных параметров АСР необходимы знания об объекте
управления, которые обычно представляются в виде статических и динамических характеристик.
Статической характеристикой называется зависимость выходной величины
х от входной (m или f) в установившемся режиме.

 Динамические характеристики бывают различного вида. Это может быть кривая разгона объекта – реакция объекта на скачкообразное изменение входной величины, при котором выходная величина изменяется во времени. Анализируя кривые разгона объекта по разным каналам входных воздействий, можно определить основные свойства объекта (наличие или отсутствие самовыравнивания, инерционность, запаздывание), а также выбрать эффективные каналы управления объектом
Динамические характеристики бывают различного вида. Это может быть кривая разгона объекта – реакция объекта на скачкообразное изменение входной величины, при котором выходная величина изменяется во времени. Анализируя кривые разгона объекта по разным каналам входных воздействий, можно определить основные свойства объекта (наличие или отсутствие самовыравнивания, инерционность, запаздывание), а также выбрать эффективные каналы управления объектом
(по силе их воздействия на выходную величину х). На рисунке 4 показана кривая разгона объекта, обладающего самовыравниванием; инерционностью, характеризуемой величиной постоянной времени Tоб; запаздыванием, характеризуемым величиной времени чистого запаздывания tоб . Сила воздействия управляющего сигнала на выходную величину определяется коэффициентом усиления Kоб.


Рисунок 4 – Кривая разгона объекта
Динамическими характеристиками АСР являются переходные процессы, возникающие в ней при нарушении ее равновесия под влиянием какого-либо воздействия (изменения регулирующего воздействия, возмущения, задания, настройки регулятора).
Получить статические и динамические характеристики можно аналитическим и экспериментальным (активным и пассивным) методами.
Для получения статической характеристики объекта аналитическим методом необходимо составить уравнения, связывающие выходную величину объекта со входной в установившемся (статическом) состоянии. Затем задаются различными значениями входной величины и по уравнению рассчитывают соответствующие значения выходной величины. По полученным данным строят линию статической характеристики.
При поступлении ступенчатого возмущения в объект, находившийся в равновес-ном состоянии, возникает переходный процесс, при котором выходная величина изменяется во времени. Для получения кривой разгона аналитическим методом нужно решить дифференциальное уравнение, связывающее входную и выходную переменные объекта во времени.
Достоинство аналитического метода заключается в возможности определения
характеристик объекта на стадии проектирования. Однако при этом трудно учесть конкретные особенности данного технологического объекта (состояние катализатора и т.п.).
Экспериментальный активный метод состоит в том, что входной переменной объекта сообщают пробные изменения (например, ступенчатой формы). Регистрируя при этом изменения выходной переменной объекта во времени, получают кривую разгона, а построив график (таблицу) зависимости между отдельными значениями входной величины и установившимися значениями выходной величины, получают статическую характеристику объекта.
Достоинство экспериментального метода состоит в его простоте, а также в том, что он не требует значительного времени. Однако в действующие технологические аппараты не всегда можно вносить изменения входных переменных. Кроме того, в ряде случаев невозможно проследить реакцию объекта только на пробные изменения, так как в объекты, как правило, поступают и другие воздействия.
 Экспериментальный пассивный (статистический) метод основан на исследовании объектов управления в процессе нормальной эксплуатации. В течение длительного времени фиксируют данные нормально работающего аппарата, после обработки которых получают характеристики объекта.
Экспериментальный пассивный (статистический) метод основан на исследовании объектов управления в процессе нормальной эксплуатации. В течение длительного времени фиксируют данные нормально работающего аппарата, после обработки которых получают характеристики объекта.
1.3 Требования к АСР
Показателями качества функционирования АСР называют величины, характеризующие поведение системы в переходном процессе при поступлении на ее вход единичного ступенчатого возмущения.
Основное требование, предъявляемое к АСР, - она должна быть устойчивой. Система устойчива, если она возвращается к установившемуся состоянию после прекращения действия возмущения, которое вывело ее из этого состояния.
Кроме того, для работоспособности системы не менее важно, чтобы процесс автоматического регулирования осуществлялся при обеспечении определенных качественных показателей.
Требования к качеству регулирования в каждом случае могут быть разнообразными, однако можно выделить несколько наиболее существенных, с достаточной полнотой характеризующих работу почти всех АСР.
На рисунке 5 представлены переходные процессы в АСР при единичном ступенчатом изменении входного сигнала.
Основными величинами, характеризующими качество регулирования, являются: длительность переходного процесса tр (время регулирования), перерегулирование s, статическая (установившаяся) ошибка dст регулирования, максимальное динамическое отклонение Xmax, число и частота колебаний регулируемой величины за время регулирования. Эти показатели определяют непосредственно по графикам переходных процессов, поэтому они называются прямыми оценками качества регулирования.

Рисунок 5 – Графики переходных процессов
Время регулирования tр представляет собой интервал времени между моментами подачи внешнего воздействия и окончания переходного процесса. Обычно считают, что переходный процесс закончился, если значение выход-ной величины отличается от заданного (xуст) не более чем на ±5 %.
Перерегулированием s называют максимальное отклонение (DXmax) ре- гулируемой величины от заданного значения, выраженное в процентах от ус-тановившегося значения:
DXmax =Xmax - xуст
s = DXmax . 100/ xуст
Статическая ошибка регулирования dст характеризует точность регулирования в установившемся режиме. Она равняется разности между заданным и фактически установившимся значениями регулируемой величины (рисунок 4, кривая 2).
Максимальное динамическое отклонение Хmax представляет собой максимальную величину регулируемой величины х в переходном процессе.
1.4 Описание реактора полного перемешивания как объекта управления
В реактор поступают два потока жидкости: с объемным расходом Q1 и температурой t1 и с объемным расходом Q2 и температурой t2. Тепловым эффектом химической реакции можно пренебречь. Если реактор снабжен переливом или регулятором уровня, то в нем содержится постоянный объем жидкости, и отводимый поток Q равен сумме двух подводимых потоков (Q = Q1 + Q2). Вследствие хорошего перемешивания температура отводимого потока равна средней температуре жидкости в реакторе t.
 |
Q1, t1 Q2, t2











 Q, t
Q, t

Рисунок 6 – Реактор полного перемешивания
Свойства реактора могут быть описаны дифференциальным уравнением I-го порядка
Tоб.dx/dt + x = Kобm (1)
где Kоб – коэффициент передачи, характеризующий плотность и теплоемкость
жидкости, а также теплопроводность между жидкостью и металлом;
Tоб – постоянная времени процесса перемешивания, характеризующая
инерционность объема жидкости в реакторе, T = V/Q.
В ТАУ принято пользоваться передаточными функциями (ПФ). Формально ПФ получается из уравнения в операторной форме путем деления многочлена правой части уравнения на многочлен левой части уравнения, т.е. выходной величины на входную величину.
Уравнение (1), записанное в операторной форме, выглядит так:
Tоб . px + x = Kоб . m, (2)
где p – символ операции дифференцирования (р = d/dt).
После преобразования уравнения (2):
(Tоб . p + 1)x = Kоб . m
Таким образом, ПФ реактора имеет вид:
W(р) = Kоб/(Tобр + 1) (3)
ПФ зависит только от параметров элемента (системы) и не зависит от входной величины. ПФ так же, как и дифференциальное уравнение, полностью определяет динамические свойства элемента (системы). Введение понятия ПФ значительно упрощает составление уравнений замкнутых АСР с большим числом элементов и связей.
Задача регулятора состоит в поддержании постоянства температуры t в реакторе, равной температуре потока жидкости, выходящей из реактора, обладающего некоторой удерживающей способностью.
Управляющим воздействием является расход Q1. Возмущающими воздействиями являются изменения температур подводимых потоков жидкости t1 и t2, а также изменение величины потока Q2.
Очевидно, что как возмущающие, так и управляющее воздействия характеризуются изменениями количества тепла, вносимого в реактор. Это предопределяет равенство динамических свойств реактора по каналам возмущающего и управляющего воздействий.
Статические характеристики характеризуют поведение системы в установившемся режиме и могут быть получены по каналам:
- регулирующее воздействие – регулируемая величина, x = F(μ);
- возмущающее воздействие – регулируемая величина, x = F(f);
- возмущающее воздействие – регулирующее воздействие (при постоянном значении регулируемой величины), μ = F(f).
По графикам статических характеристик можно определить диапазоны возможных изменений возмущающих воздействий, в пределах которых регулирующее воздействие обеспечивает компенсацию возмущений в установившемся режиме.
2 ЛАБОРАТОРНАЯ РАБОТА
«Изучение статических и динамических характеристик
реактора полного перемешивания»
1.2 Цель работы
Изучить функционирование промышленного контроллера (регулятора) АСР
реактором полного перемешивания.
2.2 Задание
Исследовать свойства объекта по его статическим характеристикам и кривой разгона и эффективность работы АСР по графикам переходных процессов.
2.3 Порядок выполнения работы
1) Изучить методические указания.
2) Освоить работу с программной системой “ПИД-регулятор”.
3) Получить конкретное задание преподавателя.
4) Получить кривую разгона объекта управления и оценить его свойства.
5) Исследовать работу АСР по графикам переходных процессов:
- при изменении задания регулятору;
- при поочередном изменении значений возмущающих воздействий (Q2, t1, t2);
- при различных законах регулирования (П-, ПИ-, ПД-, ПИД-регуляторы).
6) Сравнить значения полученных прямых оценок качества регулирования и
сделать выводы об эффективности управления реактором при различных
возмущающих воздействиях и законах регулирования.
2.4 Оформление результатов работы
Отчет о лабораторной работе должен содержать:
1) Цель работы.
2) Задание преподавателя.
3) Графики кривой разгона и переходных процессов.
4) Таблицу со значениями прямых оценок качества регулирования.
5) Выводы.
2.5 Контрольные вопросы
1) В чем заключается принцип регулирования «по отклонению»?
2) Назовите простые законы регулирования.
3) Что такое статическая характеристика объекта?
4) Что такое динамическая характеристика объекта?
5) Какие существуют методы определения статических и динамических харак-
теристик?
6) В чем заключается различие между активным и пассивным эксперименталь-
ным методом определения характеристик объекта и АСР?
7) С какой целью исследуют динамические характеристики объекта?
8) Какие существуют динамические характеристики АСР?
9) Перечислите прямые оценки качества регулирования.
10) Опишите реактор полного перемешивания как объект управления.
Литература
1 Теория автоматического управления / Под ред. А.А.Воронова.- М.: Высш. шк., 1986.- Ч.1.- 368 с.
2 Попов Е.П. Теория линейных систем автоматического регулирования и управления.- М.: Наука, 1989.- 304 с.
3 Ерофеев А.А. Теория автоматического управления.- С.-Пб.: Политехника,
1998.- 295 с.
4 Ефитов Г.Л., Артемьев С.Б. АСУТП на химическом предприятии.- М: Химия, 1990.- 160 с.
5 Перов В.Л. Основы теории автоматического управления химико-техноло-гических процессов.- М.: Химия, 1970.- 352 с.
ПРИЛОЖЕНИЕ
Описание работы с программной системой «ПИД-регулятор»
Программа предназначена для изучения системы автоматического управления реактором полного смешения на основе его математической модели и позволяет вести наблюдение за переходными процессами в системе при различных законах регулирования (П-, ПИ- и ПИД-), настройках регулятора и параметрах объекта.
Для функционирования программы нужен следующий набор технических и программных средств:
- компьютер на базе процессора Intel Pentium с тактовой частотой 100 Мгц,
объемом оперативной памяти 8 Мб (рекомендуется 16 Мб), свободное место
на жестком диске объемом 2 Мб.
- операционные системы Windows ‘9x, Windows NT, Windows 2000.


 Для выполнения программы необходимо запустить файл «ПИД-регулятор.ехе» На экране появится главное окно программы (рисунок 7).
Для выполнения программы необходимо запустить файл «ПИД-регулятор.ехе» На экране появится главное окно программы (рисунок 7).
 | |||
 |
 |
Рисунок 7 – Главное окно программы «ПИД-регулятор»
Описание кнопок главного меню:
- «Выход» - выход из программы.
- «Настройки» - настройка параметров объекта и регулятора, установка задания.
При выборе этого пункта меню на экране появится окно со следующими за-
кладками:
· «Задание»
· «Настройка физических параметров объекта»
· «Параметры объекта»
· «Параметры регулятора»
При выборе закладки «Параметры объекта» на экране появится окно (рисунок 8).
 | |||
 |
 |
Рисунок 8 – Окно ввода параметров объекта
При выборе закладки «Задание» на экране появится окно (рисунок 9).


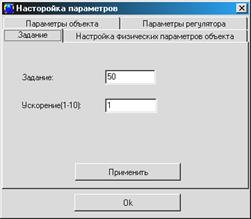 |
Рисунок 9 – Окно ввода задания регулятору
При выборе закладки «Параметры регулятора» на экране появится окно (рисунок 10). Задавая соответствующие значения параметров K1, K2, K3 и T, можно сформировать П-, И-, ПИ-, ПД- и ПИД - законы регулирования.
 | ||
 |
 |
Рисунок 10 – Окно ввода настроек регулятора
 При выборе закладки «Настройка физических параметров объекта» на экране появится окно (рисунок 11).
При выборе закладки «Настройка физических параметров объекта» на экране появится окно (рисунок 11).
 |
 |
Рисунок 11 – Окно ввода физических параметров объекта
При вводе значений физических параметров объекта (рисунок 11) значения параметров его передаточной функции K и T рассчитываются по формулам (в этом случае в окне «Параметры объекта» (рисунок 8) не требуется вводить значения K и T):
T = V/Q, где Q – суммарный расход.
K = 1/(r.C.Q + a.F)
Остальные пункты главного меню:
- «Пуск» - при нажатии на эту кнопку происходит включение системы. На графике переходного процесса с течением времени будут происходить изменения согласно выбранным настройкам регулятора, его типу и параметрам объекта. После активации системы пункт «Пуск» исчезнет и на его месте появится пункт «Стоп». При нажатии на «Стоп» можно изменить настройки и продолжить изучение поведения системы.
- «Сброс» - при нажатии на этот пункт меню все параметры системы возвращаются в начальное состояние. Очищаются графики, программа готова для ввода новых параметров и запуска.
- «Показать/скрыть схему» - показывается или скрывается структурная схема АСР.
 - «Графики» - этот пункт меню содержит подменю «Кривая разгона» и «График переходного процесса». При выборе пункта «Кривая разгона» на экране появится окно (рисунок 12). При выборе пункта «График переходного процесса» появится окно (рисунок 13).
- «Графики» - этот пункт меню содержит подменю «Кривая разгона» и «График переходного процесса». При выборе пункта «Кривая разгона» на экране появится окно (рисунок 12). При выборе пункта «График переходного процесса» появится окно (рисунок 13).
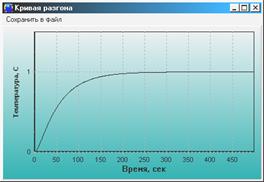 |
Рисунок 12 – Окно вывода кривой разгона объекта
 |
 |
 |
Рисунок 13 – Переходные процессы в АСР
 |
 |
 |
Рисунок 14 – Показания регулятора
СОДЕРЖАНИЕ
Введение.............................................................. 3
1 Теоретические основы автоматического регулирования..................... 3
1.1 Принцип автоматического регулирования............................... 3
1.2 Статические и динамические характеристики............................ 5
1.3 Требования к качеству АСР........................................... 7
1.4. Описание реактора полного смешения как объекта управления............. 9
2 Лабораторная работа «Изучение статических и динамических
характеристик реактора полного перемешивания»..........................11
2.1 Цель работы........................................................ 11
2.2 Задание.............................................................11
2.3 Порядок выполнения работы.......................................... 11
2.4 Оформление результатов работы.......................................11
2.5 Контрольные вопросы................................................12
Литература............................................................ 12
Приложение. Описание работы с программной системой
«ПИД-регулятор»...........................................13
Кафедра систем автоматизированного проектирования и управления