Исследования по обоснованию архитектуры и конструктивного исполнения электронных компонентов общесамолетных систем с быстрым и медленным контуром управления
Исследование архитектуры бортового оборудования современных и перспективных типов ВС
Общие принципы архитектуры бортового оборудования
Архитектура бортового оборудования большинства эксплуатируемых в настоящее время ВС имеет федеративную структуру, как это показано на рис.1.1.

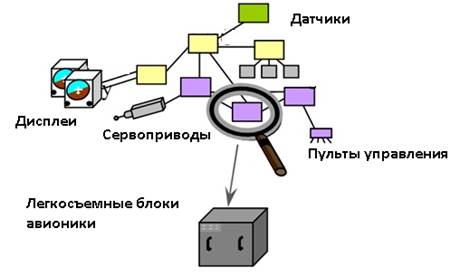
Рис.1.1. Федеративная структура бортового оборудования
В ее состав входят датчики, вычислители – легкосъемные блоки авионики, многофункциональные индикаторы (дисплеи), исполнительные устройства (сервоприводы) и пульты управления.
Так устроено бортовое оборудование отечественных ВС Ил-96/300,400,М, Ту-204/100/120/300/СЕ/СМ, Ту-214 и т.д. По этому принципу устроено бортовое оборудование ВС зарубежного производства Boeing-737/747/757/767 и Airbus A319/320/321/330/340.
Эволюция программных средств и микроэлектронных технологий, произошедшая в последнее время, позволяет совершенствовать традиционные и внедрять в оборудование ВС новые функции. В связи с этим во многом изменился подход к построению архитектуры бортового оборудования. Теперь структура определяется не функциональными задачами, как это было прежде, и диктовало необходимость построения структуры бортового оборудования на основе федеративных функциональных систем. Она определяется интегральной функцией ВС, которая может включать в себя несколько или даже много функциональных задач.
Функция ВС – способность ВС, которая может быть обеспечена аппаратными и программными средствами систем ВС. Функции включают в себя такие как управление полётом, автопилот, торможение, контроль расхода топлива, пилотажные приборы и т.д. Большая часть этих функций решается авионикой, или бортовым электронным оборудованием, включающим любое электронное устройство, предназначенное для использования на борту ВС, в том числе радиооборудование, система автоматического управления полетом и приборное оборудование.
Функции ВС все в большей степени реализуются электронными системами. Интегральная модульная авионика (ИМА) является средством обеспечения этого роста и уменьшения количества электронных блоков на воздушном судне. Это приводит к снижению конструктивной массы систем и оборудования ВС, увеличению надежности и улучшению эксплуатационной технологичности.
ИМА имеет возможность расширить определение авионики включением любой функции ВС. Необходимость выполнения этих сложных функций заставляет применять высокопроизводительные компьютерные платформы, способные поддерживать несколько приложений одним процессором или распределенной сетью процессоров.
Система ИМА состоит из платформы (или нескольких платформ) ИМА и определенного набора поддерживаемых приложений.
Платформа ИМА – модуль или группа модулей, включая базовое программное обеспечение, управляющие ресурсами таким образом, чтобы обеспечить работу, по меньшей мере, одного приложения. Ресурсы аппаратных средств и базового программного обеспечения ИМА рассчитаны и организованы таким образом, чтобы обеспечить вычислительный процесс, связи и интерфейс для поддержки, по меньшей мере, одного приложения. Платформы сами по себе не выполняют каких-либо функций ВС, а лишь создают вычислительную среду, выполняют функции поддержки и обеспечивает платформозависимые возможности, например контроль исправного состояния и парирование неисправности.
Приложение ИМА - программное обеспечение и/или аппаратные средства специального назначения с определенным набором интерфейсов, которые при интеграции в платформу, выполняет некоторую функцию ВС.
Приложение включает в себя компоненты приложения - автономные части аппаратных средств, программное обеспечение, базу данных, конфигурация которых контролируется. Сам по себе компонент не выполняет функцию ВС, а лишь является элементом для выполнения функции.
Компоненты могут объединяться в модули компонентов - набор программного обеспечения, аппаратные средства или комбинации программного обеспечения и аппаратных средств, обеспечивающих ресурсы приложениям, поддерживаемым ИМА. Модули могут быть распределены по ВС или установлены в одном месте. Модуль может также включать в себя другие модули.
В настоящее время применяются и рассматриваются в качестве перспективных два типа структур бортового оборудования на базе ИМА:
· централизованная;
· децентрализованная.
Типовая централизованная структура показана на рис.1.2. Она включает те же основные элементы: датчики, вычислители (легкосъемные блоки авионики), дисплеи, сервоприводы и пульты управления. Но основные вычислительные ресурсы сосредоточены в центральных вычислителях – кабинетах авионики, основные взаимосвязи осуществляются по шинам приема-передачи данных, например, в стандарте ARINC-629.
Типовая децентрализованная (распределенная) структура показана на рис.1.3. Она представляет собой сеть, объединяющую несколько (или даже много) центральных вычислителей, а также обычных вычислителей с помощью коннекторов. Взаимосвязи между ними могут осуществляться по шинам приема-передачи данных нескольких типов.
Рассмотрим конкретные примеры использования платформ ИМА на современных ВС.
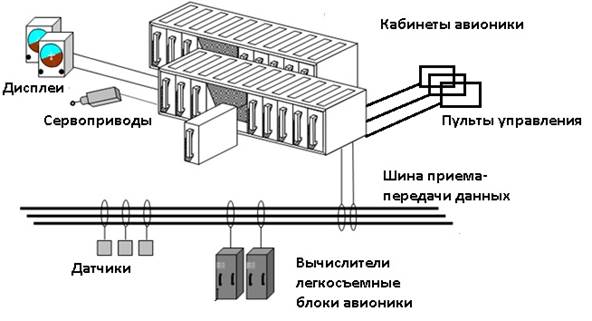
Рис.1.2. Централизованная структура бортового оборудования на базе ИМА
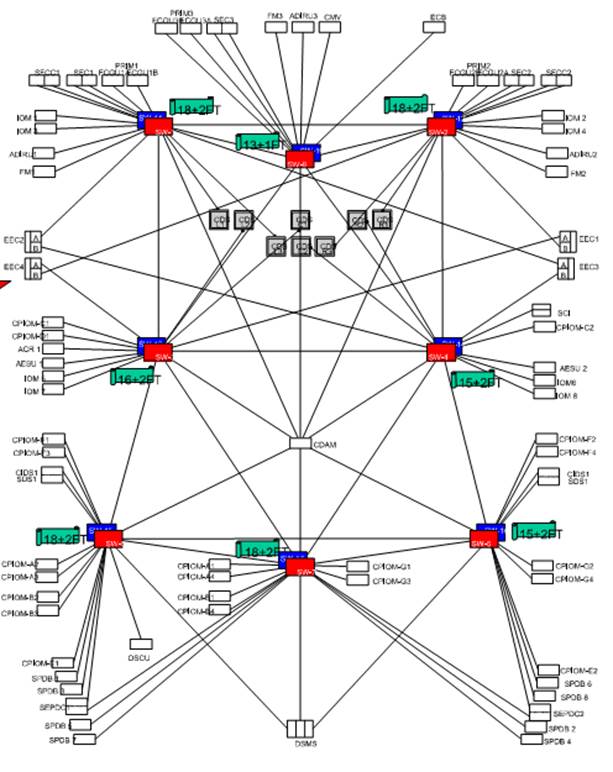
Рис.1.3. Децентрализованная (распределенная) структура бортового оборудования на базе ИМА