В соответствии с заданием на курсовой проект привод механизма осуществляется через муфту.
На кривошипе действуют силы: тяжести  ; инерции
; инерции  ; реакции
; реакции  и
и  . Уравновешивается эта система сил парой сил с моментом Мур.
. Уравновешивается эта система сил парой сил с моментом Мур.
 Н.
Н.
Для расчета сил инерции кривошипа заменяем его двумя точечными массами тА1 и тО1, расположенными в центрах шарниров А и О.
 ;
;  .
.
Силы инерции замещающих масс [1-3]:
 Н;
Н;
Точка О неподвижна, поэтому РиО1 = 0.
 .
.
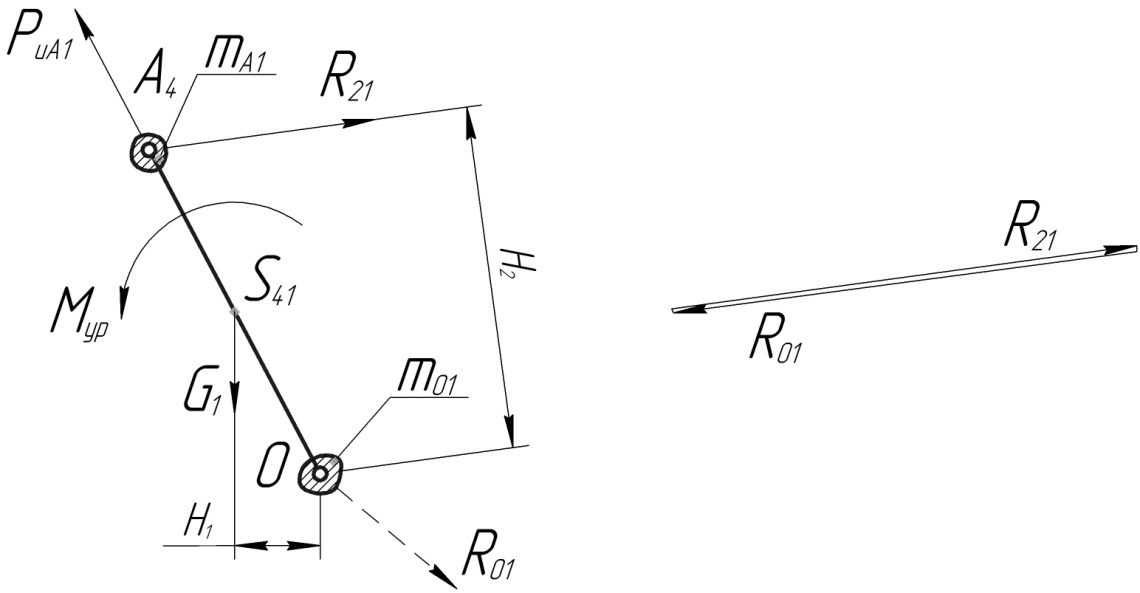
Схема нагружения кривошипа приведена на рис. 10, а.
а) б)
Рис. 10
Под действием указанной на схеме нагружения системы сил кривошип находится в равновесии, следовательно
 .
.
 Нм.
Нм.
Реакция определяется в ходе решения векторного уравнения
 .
.
План сил, действующих на кривошип, приведен на рис. 10, б.
Масштабный коэффициент плана сил
 Н/мм.
Н/мм.
Величина реакции :
 Н.
Н.
Результаты силового расчета методом планов для рассматриваемых положений механизма приведены в таблице 3.
Таблица 3
| Сила №п/п | РиА1 | РиА2 | РиВ2 | Ри3 | 
| 
| R12 | R03 | R01 | Рпс | Мур |
| Н | Нм | ||||||||||
| 323,7 | 890,1 | 353,8 | 2251,2 | 298,1 | |||||||
| 847,3 | 5391,7 | 22,3 |
Определение уравновешивающего момента
Методом рычага Н.Е. Жуковского
Рычаг Н.Е. Жуковского - повернутый на 900 план скоростей, нагруженный внешними силами, действующими на звенья механизма, силами инерции, уравновешивающими силами Рур. Для 4-го положения механизма рычаг Н.Е. Жуковского приведен на рис. 11. Под действием указанных сил рычаг в равновесии, т.е. сумма моментов сил относительно точки рυ его закрепления равна нулю.

Рис. 11. Схема нагружения рычага Н.Е. Жуковского
 .
.

 Нм.
Нм.
Расхождение результатов, полученных разными методами:
в 4-м положении механизма

в 5-м положении механизма
 .
.
Статическое уравновешивание механизма
Цель статического уравновешивания механизма - уменьшение его переменного силового воздействия на фундамент [1-3].
Задача статического уравновешивания - определение параметров противовесов (масс противовесов и радиусов их установки).
На практике наиболее часто выполняется неполное статическое уравновешивание кривошипно-ползунного механизма, при котором на кривошип устанавливается один противовес массой тП на расстоянии lOD от оси О вращения (рис. 12).

Рис. 12. Схема установки противовесов
Для выбора параметров противовеса воспользуемся методом замещающих точечных масс [1].
Звено 1 заменим массами тА1 и тО1, звено 2 - массами тА2 и тВ2. Масса тО1 неподвижна и не оказывает дополнительного переменного воздействия на корпус. Подвижные массы тА1 и тА2 уравновешиваются противовесом тП. Параметры противовеса должны удовлетворять условию
 .
.
При lOD равном... мм
 .
.
Заключение
Проведен структурный анализ механизма. Определена его подвижность и составлена формула его строения.
Методом планов и методом кинематических диаграмм выполнен кинематический расчет механизма. Методом планов определены скорости звеньев и точек звеньев 12 положений механизма, расчет линейных и угловых ускорений произведен для двух положений рабочего хода.
Расхождение результатов расчета ускорений ползуна, полученных разными методами, составило … и … %.
В ходе выполнения силового расчета определены реакции в кинематических парах и уравновешивающий момент. Величина последнего определялась методом планов и методом рычага Н.Е. Жуковского. Расхождение результатов расчета составило … и … % соответственно для … и … положений.
Определены параметры противовеса, обеспечивающего неполное статическое уравновешивание исследуемого механизма.